Перспективная навигационно-связная система для окололунного пространства

Автор: Старовойтов Е.И., Логунов А.А.
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 1 (48), 2025 года.
Бесплатный доступ
Представлены состав и структура перспективной навигационно-связной системы для окололунного пространства. Данная система обеспечивает непрерывную навигацию на всей поверхности Луны и в окололунном пространстве, а также одновременный обмен информацией между лунной инфраструктурой и наземным комплексом управления. Система включает в себя спутники-ретрансляторы в точках либрации системы Земля-Луна, взаимодействие между которыми осуществляется с использованием лазерной связи. Связь спутников-ретрансляторов с Землёй и Луной осуществляется по радиолиниям. Координаты объектов на лунной поверхности определяются с помощью локальной навигационной системы разностно-дальномерного типа.
Навигация, связь, луна, точки либрации, радиолинии, лазерная связь, радионавигация
Короткий адрес: https://sciup.org/143184204
IDR: 143184204 | УДК: 629.78.054.07:523.34
Advanced navigation and communication system for circumlunar space
The paper presents composition and architecture of an advanced navigation and communication system for circumlunar space. The system supports continuous navigation over the entire lunar surface and in circumlunar space, as well as simultaneous data exchange between lunar infrastructure and ground control complex. The system includes relay satellites at libration points in the Earth-Moon system, which interface between themselves via laser communication links. The relay satellites communicate with Earth and the Moon via radio links. Coordinates of objects on the lunar surface are determined using local navigation system of the differential range finder type.
Текст научной статьи Перспективная навигационно-связная система для окололунного пространства
Освоение Луны является важнейшим этапом индустриализации космоса, направленной на превращение его в новую среду обитания и производственной деятельности человека. В будущем Луна должна стать составной частью инфраструктуры земной цивилизации и источником внеземных природных ресурсов [1].
Решение этих задач является стимулом для выхода космической техники и технологий на новый уровень. Переход к индустриальной фазе освоения Луны возможен при условии постоянного присутствия людей на её поверхности и окололунных орбитах, а также массового использования автономных и дистанционно управляемых роботов. Всё это может быть реализовано только при наличии соответствующего навигационного и связного обеспечения.
На сегодняшний день известны различные варианты лунных навигационных систем, находящихся на разных стадиях реализации [2]. Анализ существующего уровня техники показывает его недостаточность для создания навигационно-связного обеспечения лунной инфраструктуры. Ни один из опубликованных к настоящему времени проектов не обеспечивает непрерывную навигацию на всей поверхности Луны и в окололунном пространстве при одновременном обмене информацией между лунной инфраструктурой и наземным комплексом управления (НКУ).
У всех стационарных объектов на поверхности Луны должны быть определены координаты, относительно которых уже будут определяться координаты всех подвижных объектов. Кроме того, должна быть обеспечена синхронизация временных шкал всех элементов навигационной системы, привязка регистрируемых событий ко времени, организация каналов получения служебной и телеметрической информации и т. д.
НКУ должен получать всю информацию о координатах обслуживаемых объектов в окололунном пространстве, наличии или отсутствии связи с ними, а также данные о функционировании элементов системы. Поэтому необходимы каналы связи как с обслуживаемыми объектами, так и между элементами системы. Эти каналы должны обеспечивать передачу больших объёмов информации с высокой скоростью.
Для построения канала связи оптимальным решением является сочетание радиолиний дальней космической связи сверхвысокочастотного (СВЧ) диапазона с аппаратурой лазерной связи, которая к настоящему времени уже отработана для передачи информации на дальности ~400 000 км во время полётов автоматических космических аппаратов (КА) к Луне.
Цель данной работы заключается в обосновании облика перспективной навигационно-связной системы для окололунного пространства и выборе основных принципов её построения.
навигация на лунной поверхности и связь с землей
Автономная навигация пилотируемых и робототехнических транспортных средств (луноходов) затрудняется сложностями приёма в окололунном пространстве сигналов глобальных навигационных спутниковых систем, используемых для навигации около Земли. Развёртывание аналогичной системы вокруг Луны затрудняется из-за наличия приливных возмущений (гравитационного воздействия Земли), оказывающих влияние на параметры (эксцентриситет, высоту и наклонение) орбит навигационных спутников.
В то же время исследования подтверждают, что принципиально возможно использование для навигации в окололунном пространстве спутников системы ГЛОНАСС, находящихся на околоземной орбите [3].
Навигационное поле может создаваться группировкой из шести доработанных спутников ГЛОНАСС, находящихся на круговой орбите высотой 100 000 км, снабжённых дополнительными остронаправленными антеннами, следящими за центром Луны, куда передаётся стандартный навигационный сигнал. Потребители на Луне используют стандартные приёмники глобальных навигационных спутниковых систем с доработанным программным обеспечением, а необходимый уровень радиосигнала обеспечивается в основном за счёт узкой диаграммы направленности антенны. Таким образом, обеспечивается двумерная навигация на плоскости, нормальной к линии Земля– Луна, для чего будет достаточно всего трёх разнесённых навигационных спутников. Заявлены погрешности определения местоположения на лунной поверхности до 15 м (10 м у центра лунного диска и до 100 м — на его краю) и скорости до 0,02 м/с [3].
Первый недостаток данной навигационной системы состоит в ограниченной видимой стороной Луны зоне обслуживания абонентов. Второй недостаток заключается в определении только двух координат, так как метод разрабатывался исходя из имеющейся геодезической карты Луны, на которой погрешность по высоте поверхности составляет ~3–4 м. Такой перепад высот уже является критичным при управлении движением луноходов.
Опыт применения управляемых экипажем луноходов (программа Apollo , США) показал, что при относительно небольшом удалении от посадочного модуля для навигации на лунной поверхности достаточно визуальной ориентации на местности с использованием следов, оставляемых астронавтами и самими луноходами.
Ранее созданные и существующие в настоящее время роботы, предназначенные для перемещения по лунной поверхности, дистанционно управлялись с Земли (так называемое телеопера-торное управление). Примерами являются «Луноход-1», «Луноход-2» (СССР), «Юйту» и «Юйту-2» (КНР).
При автономной навигации луноходов происходит накопление ошибок со временем, а также возникают проблемы во время получения и обработки больших массивов данных для построения карты местности, в связи с чем должна обеспечиваться хотя бы периодическая связь с Землей.
На надёжность линии связи с наземным центром управления сильное влияние оказывает большая протяжённость (свыше 400 000 км) радиотрассы между Луной и Землей. Это является основной причиной проявления следующих эффектов:
-
• сильного ослабления радиосигнала;
-
• задержки прихода радиосигнала от 1,5 до 4,0 с;
-
• наличия дополнительных помех в радиолинии.
Постоянная связь с Луной и выдача команд управления с Земли для роботов, перемещающихся по лунной поверхности, осуществляются с помощью станций дальней космической связи в СВЧ-диапазоне. Надёжность линии связи должна обеспечиваться за счёт предварительной оценки и компенсации возникающих ослаблений и искажений при передаче радиосигнала.
При отсутствии единой общепринятой методики для оценки потерь в космических радиолиниях [4, 5] разработка новых систем космической связи требует более детального учёта влияния атмосферного участка трассы распространения сигнала, в первую очередь параметров ионосферы.
При этом на состояние ионосферы (электронную концентрацию в атмосфере) оказывает влияние солнечная, геомагнитная и атмосферная активность, в т. ч. среднесуточные и сезонные колебания параметров атмосферы Земли. Большинство известных моделей не учитывают мерцания и замирания, обусловленные гидрометеорологическими явлениями на высотах 0…90 км.
Наиболее информативной на сегодняшний день является гибридная модель ионосферы CHARM-IONS , позволяющая оценить распределение концентрации электронов с высокой детализацией всего пространства в пределах физической границы атмосферы, и получить слоисто-неоднородную модель трассы распространения радиоволны в широком диапазоне частот [6].
размещение элементов навигационно-связной системы в точках либрации системы земля–луна
Перспективная навигационно-связная система (НСС) должна обеспечивать функционирование лунной инфраструктуры при минимальном использовании наземных измерительных пунктов (НИП). Для этого необходимо решить следующие задачи:
-
• разработать структуры НСС для окололунного пространства с размещением элементов в точках либрации Земля–Луна;
-
• разработать методы синхронизации и обеспечения единого времени окололунной НСС;
-
• разработать способы непрерывного обмена
данными НКУ с элементами лунной инфраструктуры без ограничений их селеноцентрических координат и положения Луны относительно НИП;
-
• выбрать на основе существующих технологий радиосвязи и лазерной связи оптимальные методы передачи телеметрической информации от элементов лунной инфраструктуры и команд управления от НКУ, а также обмена данными между составными частями окололунной НСС, расположенными на окололунных орбитах.
Частота и продолжительность сеансов связи с НИП зависят от его географических координат и баллистических условий, определяющих нахождение объекта в зоне радиовидимости. Это ограничивает количество сеансов связи в сутки и их продолжительность.
Частичным решением проблемы является использование мобильных командноизмерительных пунктов, которые могут быть размещены в произвольных географических районах. Наиболее перспективными являются воздушные измерительные пункты (ВИП), созданные на базе пилотируемых (а в перспективе и беспилотных) летательных аппаратов [7]. Радиус применения ВИП определяется дальностью авиационного носителя и может быть дополнительно увеличен путём их дозаправки в воздухе.
Однако НИП и ВИП не могут напрямую устанавливать связь с объектами, находящимися за видимой стороной Луны. Выходом является использование спутника-ретранслятора (СР), однако его выведение на окололунные орбиты, как и в случае с навигационными спутниками, будет затруднено приливными возмущениями.
В таком случае для размещения СР целесообразно рассмотреть точки либрации системы Земля–Луна (рис. 1).
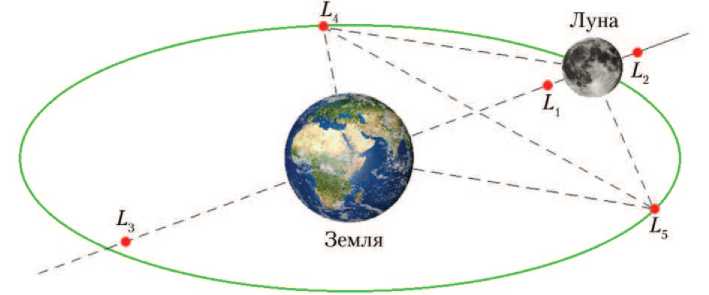
Рис. 1. Точки либрации системы Земля–Луна (рисунок создан авторами)
Из имеющихся пяти точек не может быть использована только L 3 , так как между ней и Луной находится Земля. Точка L 1 находится между Землей и Луной, поэтому в ней можно разместить СР, принимающий сигналы от НИП или ВИП и передающий их как на видимую сторону Луны, так и на СР в точках L 4 и L 5 . Спутник-ретранслятор в точке L 2 обеспечивает покрытие обратной стороны Луны, но не имеет прямой видимости с Землёй и СР в точке L 1 , поэтому для связи между ними необходимы дополнительные СР в точках L 4 и L 5 .
Размещение элементов СР в точках либрации системы Земля–Луна схематично показано на рис. 2.
При использовании точек либрации должны быть учтены следующие аспекты. Схема, показанная на рис. 1, фиксирует только одно из возможных состояний системы, которая является подвижной. Точки либрации L 1 , L 2 и L 3 называют коллинеарными точками либрации, они представляют собой точки неустойчивого равновесия. Точки L 4 и L 5 — треугольные (тригональные) точки либрации, или троянские, в которых обеспечивается устойчивое равновесие.
Фактически под влиянием возмущений от Солнца, светового давления и других факторов, равновесие и устойчивость в точках либрации разрушаются, в результате находящийся в них СР должен выполнять специальные манёвры поддержания, для осуществления которых потребуется высокоточное эфемеридное обеспечение. В области коллинеарных точек СР будет двигаться по замкнутой периодической траектории, не покидающей окрестности точки либрации, — так называемой гало-орбите.
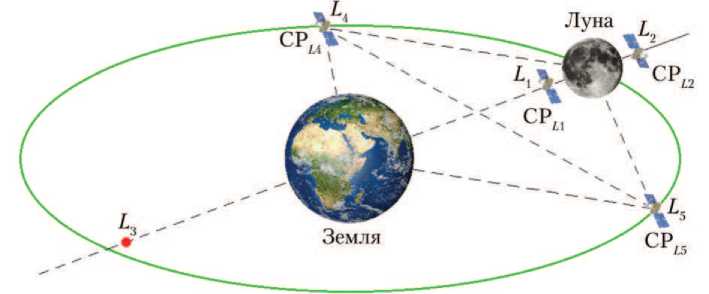
Рис. 2. Схема размещения спутников-ретрансляторов (СРL1, СРL2, СРL4, СРL5 ) в точках либрации системы Земля–Луна (рисунок создан авторами)
Вопрос о практическом использовании точек либрации нуждается в основательной проработке, требующей отдельных исследований, выходящих за рамки данной статьи, в которой рассматриваются проблемы навигации и связи.
Через СР будут проходить большие объёмы данных, так как только они позволяют поддерживать постоянную связь с объектами на обратной стороне Луны и за ней, обеспечивая таким образом целостность навигационного поля в окололунном пространстве. Эти данные будут включать в себя:
-
• сигналы синхронизации для привязки временных шкал всех элементов НСС;
-
• координатную информацию, передаваемую подвижными объектами;
-
• телеметрическую информацию от объектов в окололунном пространстве и элементов системы;
-
• аварийные сигналы от подвижных объектов и элементов НСС;
-
• служебную информацию, пересылаемую между элементами НСС.
Увеличение объёма пересылаемых данных потребует расширения полосы пропускания канала. Одним из вариантов решения этой проблемы является использование лазерно-оптического канала, обладающего следующими преимуществами:
-
• широкой полосой частот и пропускной способностью канала связи;
-
• низкой мощностью передатчика;
-
• малыми габаритами и массой аппаратуры.
Принципиальным недостатком радиотехнических систем является необходимость использования крупногабаритных антенн, обеспечивающих формирование узкой диаграммы направленности, необходимой для установления связи на линии Земля–Луна. Так, радиотелескоп РТ-70 с диаметром зеркала 70 м формирует диаграмму направленности шириной 2...18 угл. мин в диапазоне длин волн 6...39 см (770...5 000 ГГц). Антенна таких размеров может быть размещена только на земной поверхности. При доставке такой антенны на Луну или окололунную орбиту стоимость запуска 1 кг полезного груза возрастает примерно на порядок по сравнению с выведением на околоземную орбиту [8].
При этом лазерно-оптические системы с диаметром апертуры всего 0,10…0,35 м позволяют сформировать диаграммы направленности излучения с шириной до 1 угл. с (на длинах волн 0,8...1,5 мкм). Это делает возможным использование передатчиков небольшой мощности в аппаратуре лазерной связи. Кроме того, узкие диаграммы обеспечивают пространственную развязку нескольких линий связи между собой, что облегчает одновременную связь с несколькими корреспондентами.
Линия лазерной связи между СР, размещёнными в точках либрации системы Земля–Луна, не имеет двух основных недостатков, характерных для существующих типов систем космической лазерной связи:
-
1) нет потерь полезного сигнала на атмосферной трассе, как в линиях связи Земля–спутник;
-
2) не требуется предварительное целеуказание и вычисление углового упреждения для взаимного наведения узких диаграмм направленности между двумя корреспондентами, двигающимися относительно друг друга со скоростями, близкими к первой космической, что имеет место в межспутниковых линиях связи.
К настоящему времени разработаны бортовые терминалы систем лазерной связи, обеспечивающие связь на дальностях с протяжённостью, равной трассе Луна–Земля, основные характеристики которых представлены в таблице.
В точках либрации L 4 и L 5 системы Земля–Луна имеются скопления мелкой космической пыли — так называемые облака Кордылевского, рассеивающие свет Солнца. Однако, по результатам астрономических наблюдений, яркость этих объектов незначительно превышает фон ночного неба, поэтому не приходится говорить о каком-либо значительном ослаблении сигнала в лазерном канале.
Таким образом, на сегодняшний день возможно развёртывание в окололунном пространстве гибридной системы связи, которая одновременно включает в себя радиолинии и лазернооптические каналы [13].
Для связи с Землей также может быть использована лазерная связь, однако её применение может быть ограничено следующими факторами:
-
1) вероятность установления связи с НИП сильно зависит от метеорологических условий в месте его нахождения;
-
2) на атмосферном участке радиотрассы происходит дополнительное ослабление полезного сигнала;
-
3) задержка при распространении сигнала на трассе Луна–Земля.
характеристики бортовых терминалов лазерной связи [9–12]
Система
Бортовая система лазерной связи (БСЛС)
Межспутниковая лазерная навигационно-связная система (МЛНСС)
Lunar Lasercom Space Terminal (LLST)
Space Terminal Element (STE)
Страна, год
РФ, 2011
РФ, 2012
США, 2013
США, 2022
Разработчик
АО «НПК «СПП»
АО «НПК «СПП»
Goddard Space Flight Center, MIT Lincoln
Laboratory
MIT
Космический аппарат – носитель
МКС
«Глонасс-М»
LADEE
Orion
Орбита
Низкая околоземная круговая 400 км
Средневысотная круговая
19 400 км
Окололунная
Окололунная
Максимальная дальность, км
2 000
55 000
400 000
400 000
Максимальная скорость передачи данных
622 Мбит/с
50 Кбит/с
155 Мбит/с
250 Мбит/с
Масса, кг
80,0
18,0
30,7
76,0
Потребляемая мощность, Вт
150
—
90
165
Ответная часть
Наземный терминал
Бортовой терминал космического аппарата – корреспондента
Наземный терминал
Наземный терминал
Проблем, обусловленных первым и вторым пунктами, можно избежать, если использовать для приёма сигнала ВИП с высотой полёта ~10 км.
Последний пункт обусловлен тем, что высокоскоростной широкополосный канал целесообразно использовать для передачи команд управления в режиме реального времени. В случае задержки сигнала на 1,5…4,0 с процесс телеоператорного управления усложняется, как при работе с существующими в настоящее время моделями луноходов. В этом случае целесообразно разместить пункт управления также в окололунном пространстве, а для связи с Землей достаточно традиционной дальней космической связи по радиоканалу в СВЧ-диапазоне.
Одной из основных технических проблем для НСС является синхронизация всех передатчиков радионавигационных сигналов. Для бортовой аппаратуры КА дополнительная сложность связана с тем, что высокостабильные эталоны времени и частоты имеют большие габариты и массу: атомный стандарт с нестабильностью частоты, соответствующей ошибке измерения временного интервала ~10‒13 с, имеет массу более 30 кг.
Альтернативный подход состоит в использовании внешних источников сигналов синхронизации, к которым, в частности, относятся излучаемые пульсарами в радиодиапазоне периодические последовательности импульсов, имеющие высокую стабильность периода.
Стабильность излучения пульсаров в радиодиапазоне превосходит характеристики атомных стандартов частоты и времени, но при этом для регистрации их сигналов требуются антенны с линейными размерами ~10 м [14]. В настоящее время разрабатываются космические самораскрывающиеся антенны на основе ферменного каркаса с удельной массой конструкции 1,0...1,2 кг/м2 [15], которые при площади 10×10 м будут иметь массу до 120 кг.
Применение таких антенн также обостряет проблему минимизации массы и габаритов бортовой аппаратуры, размещаемой на КА, в первую очередь антенно-фидерных устройств. В этом плане терминалы лазерной связи обладают значительными преимуществами.
лунный сегмент навигационно-связной системы
При навигации подвижных объектов необходимо учитывать особенности строения и рельефа Луны.
Напряжённость постоянных магнитных полей, измеренных на Луне, составляет менее 1% напряжённости постоянного магнитного поля Земли. При этом постоянные магнитные поля на лунной поверхности меняются от точки к точке, но не укладываются в картину глобального дипольного поля [16]. По этой причине нельзя использовать магнитометры и компасы для ориентации на лунной поверхности.
Значительную часть рельефа образуют валы кратеров, придающие выраженную неровность лунной поверхности. Из-за малого радиуса Луны расчётная дальность видимости горизонта почти в два раза меньше, чем на Земле.
На Луне возможно использование в пределах прямой видимости радиосистем ультракоротковолнового диапазона, измеряющих дальность до объекта и его азимут. Но из-за сильной кривизны лунной поверхности дальность действия будет значительно меньше, чем на Земле. Увеличение высоты антенны на 10 м обеспечивает увеличение дальности в среднем на 3 км. Дополнительно увеличить дальность можно за счёт размещения антенн на естественных возвышениях [1].
При возвышении наблюдателя на уровень h над поверхностью, дальность видимости лунного горизонта составит примерно l = V (R. + h )2 - Rл, где Rл — средний радиус Луны, Rл ≈ 1 737 100 м.
Если принять за аналог наземную локальную навигационную систему дециметрового диапазона (400...450 МГц; ультравысокочастотный, или UHF , диапазон), создающую радионавигационное поле, разделённое на «соты» с кодовым разделением сигналов, имеющие площадь 10×10 км [17], то минимально необходимая высота антенны радионавигационной опорной станции над лунной поверхностью составит 28,78 м.
При этом наземные радиотехнические системы на базе радиотелескопов позволяют определять координаты объектов на видимой стороне Луны, обеспечивая при этом разрешение 5 м на плоскости [18].
Развёртыванию крупноразмерных антенн благоприятствует отсутствие на Луне атмосферы вместе с ветровыми нагрузками и невысокая сила тяжести. В связи с этим отпадает необходимость использовать оттяжки при наращивании высоты антенн. Антенны для приёма радиосигналов пульсаров значительно проще установить на лунной поверхности, чем выводить их вместе со спутником-ретранслятором и разворачивать в открытом космосе.
Так, в работе [19] предлагается возведение в районе Южного полюса Луны башен с фотоэлектрическими преобразователями (солнечными батареями) для их размещения в области постоянной освещённости. Низкая гравитация, отсутствие атмосферы и спокойная сейсмическая обстановка позволяют построить сооружения высотой более 1 км. В качестве материала планируется использовать бетон на основе реголита. Это решение обосновано тем фактом, что транспортировка с Земли эквивалентного количества стали или углеродного волокна будет намного более затратной и, соответственно, нерентабельной.
На Луне достаточно хорошие условия для использования астрономических методов навигации [1], однако их точность не позволяет обеспечить субметровую погрешность определения координат, поэтому они могут иметь только вспомогательную роль.
Структура лунной навигационно-связной системы
Предлагаемая лунная НСС должна иметь структуру, представленную на рис. 3.
НКУ на Земле выполняет функции командного и программного управления, мониторинга навигационного поля, телеметрического мониторинга составных частей системы. НИП и ВИП предназначены для связи со СР (СРL1, СРL2, СРL4 и СРL5), находящимися в точках либрации системы Земля–Луна. Спутники-ретрансляторы обеспечивают навигацию в окололунном пространстве и используются для синхронизации подсистемы на лунной поверхности. Связь между СР осуществляется с использованием лазерных каналов.
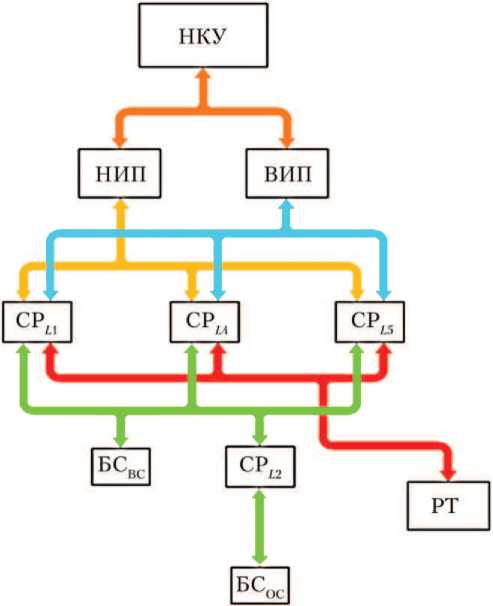
Рис. 3. Структура лунной навигационно-связной системы: НКУ — наземный комплекс управления; НИП — наземный измерительный пункт; ВИП — воздушный измерительный пункт; СРL1, СРL2, СРL4, СРL5 — спутники-ретрансляторы; БСВС и БСОС — базовые станции на видимой и обратной сторонах Луны соответственно; РТ — радиотелескоп (рисунок создан авторами)
Радионавигационные опорные станции — базовые станции (БС) — расположены на лунной поверхности и служат для навигации пилотируемых луноходов, космонавтов и роботов. С базовыми станциями на видимой стороне Луны связь осуществляется через СР L 1 , СР L 4 и СР L 5 , а для обмена информацией со станциями на обратной стороне Луны используется СР L 2 .
Радиотелескопы на лунной поверхности принимают радиосигналы пульсаров, по которым осуществляется синхронизация передатчиков навигационных радиосигналов. Для охвата всей поверхности видимой и обратной стороны Луны синхронизация осуществляется через СР.
Схема, иллюстрирующая взаимодействие основных частей лунной НСС, представлена на рис. 4.
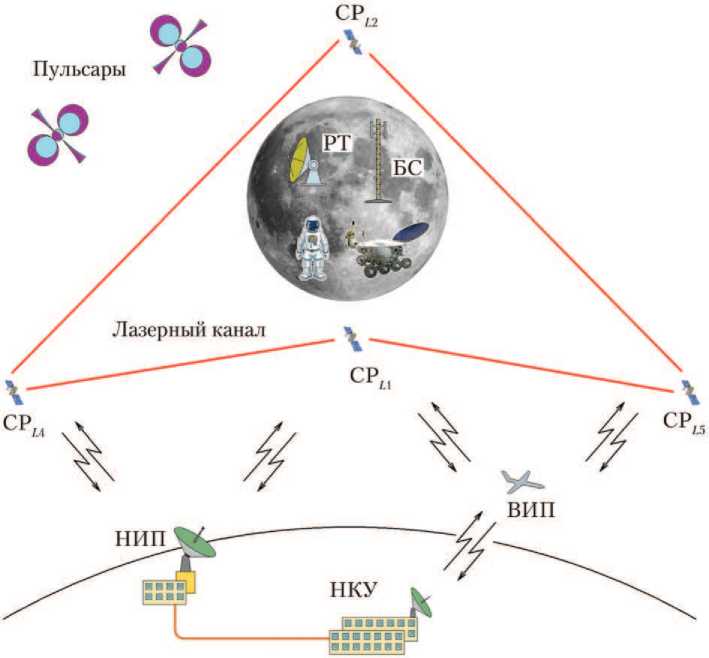
Рис. 4. Взаимодействие основных частей лунной навигационно-связной системы:
БС — базовая станция (рисунок создан авторами)
Примечание. Остальные обозначения см. в подрисуночной подписи к рис. 3.
метода реализуют так называемый разностнодальномерный принцип, для описания которого используется известный в радионавигации математический аппарат [20].
В запросном режиме дальность до БС вычисляется по выражению
c (A t - A t АЗ )
D = 2 , где с = 3 ∙ 108 м/с — скорость света в вакууме; Δt — задержка между импульсом метки времени от опорного генератора и приходом навигационного радиосигнала; ΔtАЗ — аппаратная задержка при излучении навигационного радиосигнала.
Погрешность измерений составляет оценка возможности определения местоположения объекта на лунной поверхности
Для оценки примем допустимую погрешность определения координат на лунной поверхности на порядок выше той, что обеспечивается наземными радиотехническими средствами: Δ D = 0,5 м. При этом максимальная скорость объекта υ ≤ 5 м/с (достигнута астронавтами Apollo 16 на пилотируемом луноходе — лунном ровере).
Частота обновления навигационных данных в этом случае должна быть не меньше чем
и f = = 10 Гц.
J AD
В локальной системе навигации, описанной в работе [17], могут быть использованы следующие два метода определения координат: беззапросный , или TDoA ( Time Difference of Arrival ), и запросный , или SDS-TWR ( Symmetric Double Sided Two Way Ranging ), являющийся одной из модификаций метода ToF v ( Time of Flight ) и развитием метода RTT ( Round Trip Time ). Оба
A D = V A D 2ап + A D 2 тв =
= V (сДtизм)2 + (сДtизм)2 = с fittизм, где ΔDзап и ΔDотв — погрешности определения дальности при запросе абонентским терминалом и при получении ответа от БС соответственно; Δtизм — ошибка измерения времени прихода навигационного радиосигнала.
Тогда при Δ t АЗ = 1 ∙ 10‒10 с погрешность определения координат равна Δ D = 4,2∙ 10‒2 м.
В беззапросном режиме БС синхронизируются между собой для излучения радиосигнала в строго определённый момент времени, а дальность между абонентским терминалом и БС определяется как
D = Δ tc .
Погрешность измерений определяется выражением
ΔD = c(Δtизм + Δtсхр), где Δtсхр — ошибка синхронизации БС.
Если A t изм = 1 • 10 10 с, то
для получения погреш ности определения коор
-
-
динат не более A D = 0,5 м ошибка синхронизации
A t с х < 1,57 • 10 -9 с.
Эти оценки погрешно стей допустимы для нави гации внутри «сот» разме
-
-
-
рами примерно 10×10 км, состоящих из 3–6 БС. Такие «соты» формируют навигационное поле, в котором осуществляется перемещение людей и тех-
ники по лунной ности (рис. 5).
При выходе
поверх-
ницы
крайних
объект перестает навигационные
Поэтому локальной
для
за гра-«сот» получать данные. создания
системы
вигации на лунной
на по
-
-
верхности целесообразно рассмотреть подход, при-
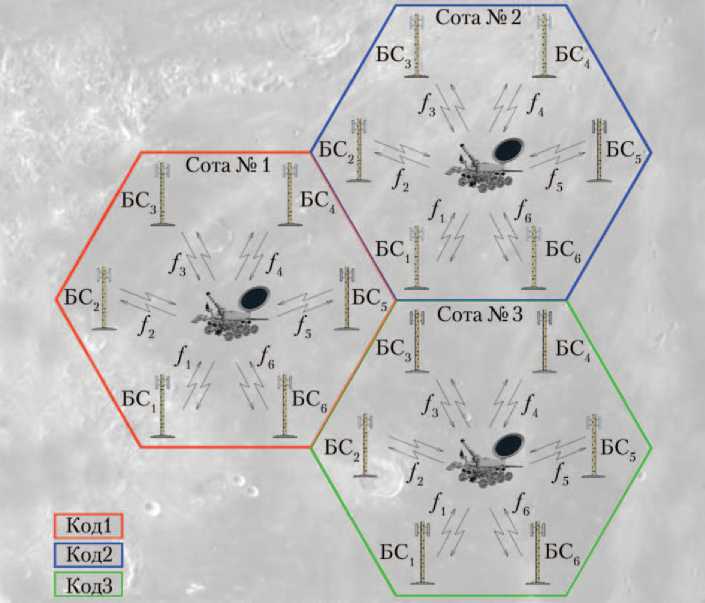
Рис. 5. Навигационное поле, сформированное отдельными «сотами» локаль- частоты
– ной системы навигации: БС1…БС6 — базовые станции; ƒ1, ƒ2, …, ƒn радиосигналов соответствующих БС (рисунок создан авторами)
меняемый в радиотех нических системах дальней навигации,
используемых в
дении. поле
В этом
авиации и судовож-случае навигационное
может формироваться не внутри
отдельных «сот», а вокруг трёх и более опорных БС, образующих не меньше двух пар, создающих пересекающиеся линии положения.
Прямые, соединяющие парные БС,
должны пересекаться под углом, отличающимся от 180°. Одна из БС является ведущей, а измеряемые дальности могут превосходить базовые расстояния d 1 , d 2 между БС (рис. 6).
Если ошибки измерения времени прихода навигационного радиосигнала A t изм для обеих пар БС равны, то в этом случае среднеквадратическое значение погрешности определения местоположения будет определяться следующим выражением из работы [20]:
ст
с At изм
sin
^ 21
D
2sin(a) sin
где ^ 1 , v 2 — базовые углы первой и второй пар БС; а — угол, под которым пересекаются линии положения (гиперболы).
Для основных областей рабочей зоны системы, угол определяться через углы у 1 ,
рые делятся
к
гиперболам в
V 1 + V 2 а = 2 ,
(I
а
и II) может кото-
пополам касательными точке А
откуда следует, что
с At изм

ст D
2sin
( У 1 + У ?|
sin
чМ
sin
V^
Оценки для трёх БС с высотой антенн 450 м ( l ≈ 40 км) и базовыми расстояниями d 1 = d 2 = 16 км показывают следующее. В рабочей области I при использовании беззапросного метода измерений погрешность составит от 5,2 до 15,3 м, а запросный метод обеспечивает погрешность от 0,4 до 1,3 м.
Использование локальной системы навигации будет ограничено рельефом лунной поверхности, неровности которой могут нарушать непрерывность навигационного поля. Поэтому на борту
пилотируемого лунохода или мобильного робота должны быть датчики для автономной навигации, информация от которых позволит продолжить движение по маршруту при потере сигнала БС.
К настоящему времени разработаны алгоритмы и программное обеспечение для автономной навигации луноходов по изображениям находящихся поблизости кратеров, сопоставляемых с картой, составленной на основе данных съёмки с лунной орбиты. На луноходе должны быть установлены стереотелевизионные системы, дополненные фарами для работы в ночное время, или лазерные локационные системы, так на-
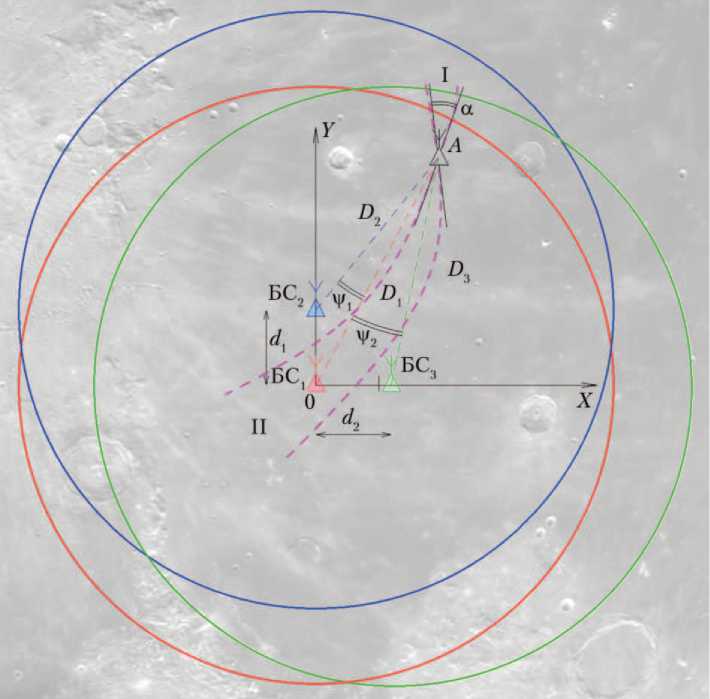
Рис. 6. Принцип навигации по трём опорным базовым станциям (БС) в дальней зоне: I и II — основные области рабочей зоны системы; α — угол, под которым пересекаются линии положения (гиперболы); A — местоположение абонентского терминала; D1, D2, D3 — расстояние от абонентского терминала до БС; ψ 1, ψ 2 — базовые углы первой и второй пар БС; d1, d2 — базовые расстояния между БС (рисунок создан авторами)
зываемые лидары, имеющие большую дальность измерений и нетребовательные к наличию освещённости. Потенциально достижимая погрешность определения местоположения лунохода в этом случае составляет 5...10 м [21, 22].
Также для навигации по рельефу лунной поверхности может использоваться алгоритм, реализующий метод одновременной локализации и построения карты ( SLAM — Simultaneous Localization and Mapping ) на основе данных, полученных от лазерных локационных систем. Тестирование такого алгоритма показывает достижимую погрешность определения местоположения ~1,3 м [23].
выводы
Предложены состав и структура перспективной навигационно-связной системы для окололунного пространства, обеспечивающей непрерывную навигацию на всей поверхности Луны и в окололунном пространстве с одновременным обменом информацией между лунной инфраструктурой и НКУ.
Для обеспечения устойчивой связи с объектами на лунной поверхности предполагается разместить спутники-ретрансляторы в точках либрации системы Земля–Луна, связь между которыми осуществляется с использованием каналов лазерной связи, а связь с Землей и Луной — по радиолиниям.
На лунной поверхности определение координат людей и техники возможно с использованием локальной навигационной системы, обеспечивающей погрешность измерений от 0,4 до 15,3 м. Целостность этого навигационного поля может нарушаться рельефом лунной поверхности, поэтому для прохождения по маршрутам большой протяжённости луноходы должны иметь средства автономной навигации — стереотелевизионные и лазерные локационные системы.
Кроме непрерывной навигации должна обеспечиваться постоянная связь с луноходами. С учётом возможного отсутствия видимости БС связь может осуществляться через СР.
