A Gaussian Filter based SVM Approach for Vehicle Class Identification

Author: Gargi, Sandeep Dahiya
Journal: International Journal of Modern Education and Computer Science (IJMECS) @ijmecs
Article in issue: 12 vol.7, 2015.
Free access
Vehicle identification or classification is one of the application areas that come under real time image processing. Vehicle recognition is having the significance in various applications including the traffic monitoring, load monitoring, number plate recognition, vehicle theft prevention, traffic violation detection, management of traffic etc. As the images are captured as primary data source, it can have number of associated impurities which include the background inclusion, object overlapping etc. Because of this, object detection and recognition is always a challenge in real time scenario. In present work, a robust feature based model is presented for feature extraction and classification of vehicle images. The presented model is applied on real time captured image to categorize the vehicle in light, medium and heavy vehicle. Firstly, the vehicle area segmentation is performed and later on the Gaussian filter is applied to extract the image features. This featured dataset is processed under Support Vector Machine (SVM) based distance analysis model for vehicle recognition and vehicle class identification. The experimentation results of present investigation shows the recognition rate of devised system over 90%.
SVM, Vehicle Classification, Gaussian Filter, Vehicle Type, Distance Adaptive Mapping, Recognition Rate
Short address: https://sciup.org/15014817
IDR: 15014817
Text of the scientific article A Gaussian Filter based SVM Approach for Vehicle Class Identification
Published Online December 2015 in MECS
Vehicle recognition is having the significance in various applications including the traffic monitoring, load monitoring, number plate recognition, vehicle theft prevention, traffic violation detection, management of traffic etc. [1-5]. Some of the parking areas also use the vehicle recognition approach as the surveillance method to avoid the vehicle theft [6]. Earlier sensors, radar, loop detector were used for vehicle recognition approach but there installation and maintenance cost were high so to overcome these drawbacks the authors use computer vision approach [6-9]. These applications generally work in video form, as the video is captured in real time and transformed to the sequence of images. These images can be processed to perform the vehicle identification or vehicle class type identification [10-11]. The basic process model for vehicle detection and classification is as shown in Fig. 1.
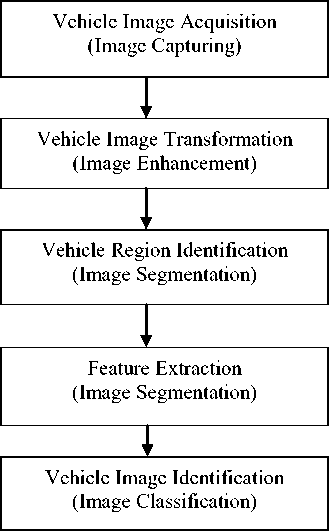
Fig.1. Image Classification Model.
Firstly, the image is captured from the real environment using high resolution cameras in real environment [7-8]. As the image is captured, it can have number of impurities or the background overlapping [9], therefore there is requirement to filter and enhance the image. Moreover to improve the image, the image transformation is applied which includes the size level, contrast level, color level adjustments. Now this filtered enhanced image is used as the main featured image for classification process. In next stage, the background is separated from the raw input image. This process of background separation comes under segmentation process. The high level segmentation is applied over the image to identify the vehicle region of interest (ROI) over the image. The vehicle area identification is done using the thresholding method which is identified and the final work is to perform the feature extraction [5, 7]. There are number of related methods to explore the low level features over the image and the same features includes edge detection, feature point identification etc. As the image set is transformed to the feature set, the final stage is to apply the classification algorithm. There are number of classifiers to perform the recognition or classification of image. These classifiers includes Linear Discriminant Analysis (LDA) classifier [1], Bayesian network [2, 12], SVM [13, 21-27], neural network [14], etc. The same classification model can be applied over the image to perform the recognition and classification of vehicle.
Section II will provide a framework of related work carried out by the researchers and authors, in section III, objectives of the research work is presented following the methodology and model for classification of vehicles into three categories in section IV. Section V explores the results and discussion obtained from the work following the concluding remarks in section VI.
-
II. Related Work
The work carried out by earlier researchers on different classification method applied for vehicle detection and class identification is presented. Habibu Rabiu [1] presented a work on vehicle recognition and detection based on the urban intersection analysis provided for the vehicles. The work model used LDA classifier for improving the classification rate. Mehran Kafai and B. Bhanu [2] discussed on video based vehicle class identification by applying the probabilistic model to perform the vehicle prediction. Author allied the feature vector analysis with Bayesian network to perform the vehicle class identification. Amol Ambardekar et al., [3] has conducted a work on vehicle detection and tracking under surveillance camera processing. Author reported the vision performance by improving the vehicle aspect analysis in real time scenes and obtained the spatial view and provided the real time video derivation to generate the primitive features based on the positional aspects. Hakki Can Karaimwer and Yalin Bastanlar [4] presented vehicle video analysis based on the frame averaging and provided the dimension specific analysis to extract the image features. Celil Ozkurt and Fatih Camei [5] discussed a model using neural network for classification of vehicles and estimation of traffic on road. Longbin Chen et al., [6] explore on surveillance of the videos and analyzed the key feature analysis for real video processing under shadow, distortion and imagery object processing. The camera position based discriminative feature extraction is applied for feature generation. Ryan P. Avery et al., [7] classifies the vehicle depending on length using the algorithm developed. Kanwal Yousaf et al., [8] conducted a comparative study on different vehicle recognition and classification approaches, on comparing different classification approaches the author recommended that HDBN provides better recognition rate. Z. Sun et al., [9] presented a model built with the help of Gabor filter and SVM which provided better performance than model built with PCA and neural network. Zhiming Qian et al., [10] utilized SVM and PCA classifiers for vehicle detection. Author defined the set as the training and testing set and performed the vehicle sequence based recognition applied on the traffic scenes using SIFT method. Yiling Chen and GuoFeng Qin [11] provided the video based vehicle tracking and classification applied on real time scenario. Author provided the Gaussian filter, Bayesian and fuzzy SVM for classification and recognition. M. Vineela and N. Venkateswar Rao [12] presented a work on video stream processing using Bayesian network approach. Author defined the enhanced security mechanism to identify the target vehicle and based on which the aerial surveillance mechanism is proposed. Jeffrey B. Flora et al., [13] has presented a framework on vehicle image classification model with adaptive classification approach with video sequence analysis to achieve the speed and the tracking features. Ioana Sporea and Andre Gruning [14] presents spiking neuron model based on learning approach and the image feature extraction and relative modeling to perform the effective recognition. Xue Mei and Haibin Ling [15] discussed sparse feature generation and classification for the vehicle tracking optimization with resolving the feature challenges. Brendan Morris and Mohan Trivedi [16] contributed on vehicle video streaming and simultaneous recognition process model by combining model to track and identify the vehicle with resolution dependency. Mohamed Elhoseiny et al., [17] discussed video surveillance system to classify the available objects in multiple classes and used the PCA based entropy analysis to generate the image features and to analyze the vehicle class identification based on configuration analysis. Suresh Babu Changalasetty et al., [18] presented a work on moving vehicle classification and traffic management and scene management with setting up the stationary camera on the road by using the LABVIEW for feature extraction. Michael Hodlmoser et al., [19] presented a vehicle classification based on the positional and directional vectors. Author provided the space and time optimized analysis model to generate the relative feature aspect and frame adaptive feature extraction applied over the image. Zezhi Chen et al., [20] discussed Gaussian filter and kalman filter for building feature set and SVM for recognition purpose. Lam Hong Lee et al., [21] presented a classification model which uses SVM and Euclidean distance in training and testing phase respectively. Chin-Teng Lin et al., [22] discussed a pattern recognition model using SVFNN (Support Vector based Fuzzy Neural Network). Author tested the model on different dataset i.e. DNA, Iris, Vehicle and concluded that model provides high recognition accuracy. Wesal Abdallah and Li Hong [23] proposed a model for logo classification of vehicle using 2DPCA (for extraction of feature) and SVM ensemble and concluded that SVM ensemble provides better recognition than SVM. Lee Teng Ng, Shahrel Azmin Suandi and Soo Siang Teoh [24] performed vehicle classification using SVM and ViBe
(Visual Background Extractor) for image extraction from primary source and HOG for feature extraction. The next section provides a framework of the objectives for the present investigation.
-
III. Objectives of Present Work
Although authors used various classifiers such as Linear Discriminant Analysis (LDA) classifier, Bayesian network, SVM, neural network etc. to perform the recognition and identification of images but in present investigation authors presented a framework of Gaussian filter improved SVM model for real time vehicle recognition and vehicle class identification which is defined as the three stage model. The objectives of the presented research work will be achieved by using Gaussian filter and SVM approach methodology is as mentioned under:
-
1. To define a three stage model for vehicle class identification.
-
2. To apply the Gaussian transformation model to acquire the vehicle image features.
-
3. To apply SVM model to identify the vehicle class.
-
4. To improve the accuracy of recognition process.
The next section of the study provides the computational model and methodology used for the present investigation.
-
IV. Methodology and Computational Model of Present Investigation
In present study, a feature adaptive intelligent model is presented for vehicle identification as well as vehicle class identification. Vehicle class is divided into light vehicle, medium vehicle and heavy vehicle. The study of research work is divided into three phases.
In first phase the image is captured from real environment which may also suffers from number of associated challenges relative to the environment. These challenges include the background to the area, vehicle distance variation and the other vehicle movement [1820]. Because of this, there is the requirement to first identify the vehicle area or the object region based on which the actual classification process can be applied [18]. In preprocessing, improvement of image feature and separation of object part from background is done. To improve the image feature, image will be converted into grayscale and then histogram equalization is applied. As the features of image get improved, the next step is to locate vehicle over the image. To perform this, the thresholding based approach is applied along with morphological operator. The separation of background from foreground is done so that the actual object over the image will be identified. As the object or the vehicle is identified, the next work is to identify the vehicle features.
In second phase, the feature extraction is performed over the image. To extract the features, the window adaptive model is applied in present investigation and feature extraction model is as shown in Fig. 2. In this stage, Gaussian filter and frequency analysis approach will be applied to extract the image features. This stage will transform the image set into statistical feature set. As the feature are extracted then the feature set are obtained for training and testing set and is obtained in the form of edge point the next stage is to perform vehicle classification.
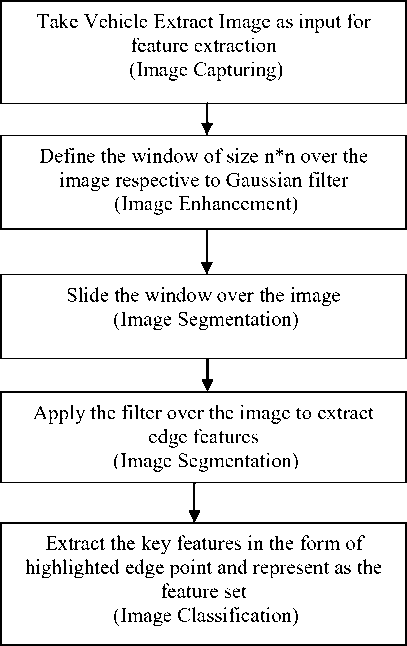
Fig.2. Model for Extraction of Features of Image.
In third phase, vehicle recognition and classification is done. To perform the classification SVM based weighted model and distance analysis approach is applied. As the feature set is obtained for training and testing dataset, the SVM classifier [21-27] is applied to map the input image feature with dataset images. Based on this kernel mapped feature set, the weights over the images are applied and then compared with dataset images using distance based mapping. The maximum mapped input image over the dataset is considered as the recognized image. As the vehicle image is recognized, the next step is to identify the relative class and the training set mapped image class is considered as the class of input vehicle image. This SVM adaptive process is applied over the dataset till the complete recognition process is not completed. The algorithmic model for classification of vehicle into light, medium and heavy vehicles is as shown in Fig. 3.
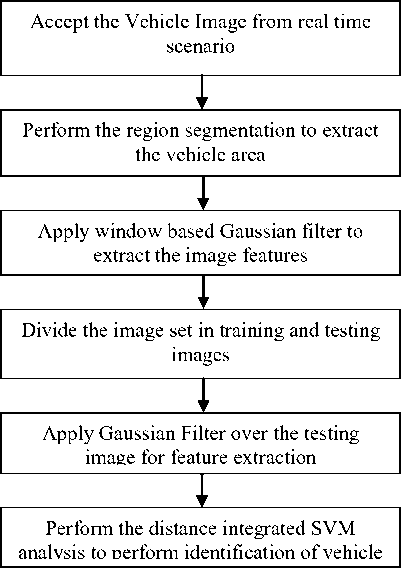
Fig.3. Model for Classification of Vehicle into Light, Medium and Heavy Vehicle.
The work stages considered for present investigation are discussed as under:
-
(a) Get Vehicle Image
The first requirement while working with real time application is to perform the effective capturing of image to acquire single vehicle in an image. The reliability of the recognition process depends on the image capturing. In this work, the real time image capturing is done using high resolution cameras. The image is captured under the background, distance and other vehicle analysis.
-
(b) Improve Image Feature
As the image is a raw image, it is required to improve and transform it to normalize image so as to improve features of image. This normalization process includes the conversion to grayscale form, resizing, and the enhancement of color and brightness for image. Beside this histogram equalization is applied to improve the feature of image.
-
(c) Extraction of vehicle image
To locate vehicle over image, thresholding based approach along with morphological operator is applied. The separation of background from foreground is done so that actual object over the image will be identified. As the object or vehicle is identified, the next work is to extract feature of image.
-
(d) Feature Extraction
After improving the image features, the window adaptive edge feature analysis model is applied. In this work, Gaussian filter is applied based on frequency analysis to acquire the features. The feature extraction is applied on training and testing set and feature set is obtained for both training and testing set.
-
(e) Recognition
After defining the training and testing set on vehicle images, the next step is to perform the recognition of vehicle. The vehicle recognition and classification is applied using SVM approach and it is a kernel based method. In first stage, the training set is trained over the SVM and after obtaining the network feature, the mapping of test image is done to training set via SVM [19-27]. The distance adaptive mapping is here applied to perform the recognition of vehicle. As the maximum mapped vehicle is identified, the relative class such as light, medium and heavy vehicle is obtained.
-
(f) SVM
SVM is the classifier used in this work to identify the apnea and normal instances. This classifier is having the ability to provide the high accuracy in classification process while working with high dimensional data. This classifier also provides the modeling for diverse sources of data. SVM classifier actually comes under kernel based algorithmic approaches. In this approach, the data dependency is also identified as the functional computation to generate the feature space. The advantages of the work are defined in terms of non linear decision boundaries defined under method specification for linear classification. This classifier is defined along with the specification of kernel function that itself provides the fixed dimensional vector representation with sequence generation and structural representation. Some of the most used Kernel functions are RBF Kernel, Polynomial Kernel, Fisher Kernel, String Kernel, and Sigmoid Kernel. This method effectively process on different decision functions to process on data values to identify the data criticality. The data usage based analysis can be obtained under environmental specification. The kernel specification is defined to control the classification process. There are different classification methods along with the specification of relative kernel parameters. The simplest form of SVM is called linear classifier that can be applied on balanced dataset [28-30].
Further, the devised model based on Gaussian filter and SVM approaches is implemented in MATLAB environment. The next section of devised model presents a framework of results and discussion.
-
V. Results and Discussion
applied on the vehicle dataset and the accuracy is calculated as shown in Table 1 to Table 4. Table 1 shows the recognition of the dataset for the defined testing set and Fig. 4 shows the recognition results of vehicle obtained from presented model when image taken from dataset I and testing set is tested against the training set. This process of testing is repeated for 10 test images and the results in Table 1 shows that the 90% recognition rate is obtained. Similarly Table 2 shows the recognition obtained for vehicle recognition and class identification for non dataset image. The result shows that approximately 86% recognition rate is obtained from the present work. Table 3 shows the recognition obtained for vehicle recognition and class identification for non dataset image. The result shows that about 87.5% recognition results are obtained from the work.
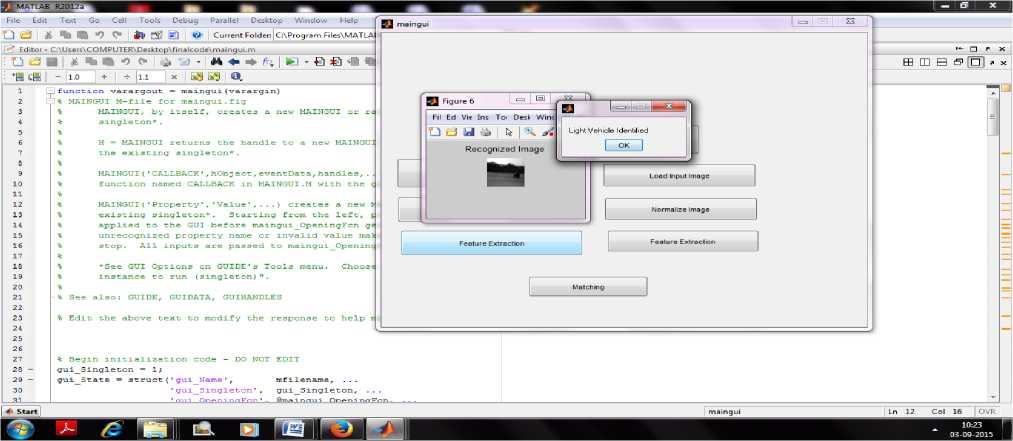
Fig.4. Recognized Image taken from Dataset 1.
Table 1. Dataset I Recognition of Dataset for Defined Testing Set
|
Property |
Value |
|
Dataset Size |
35 |
|
Format |
JPG |
|
Resolution |
1280x720 |
|
Type |
Color |
|
Captured |
Real Time on Road |
|
Size (Training) |
25 |
|
Size(Testing) |
10 |
|
Dataset Images |
Yes |
|
Number of Classes |
3 |
|
Recognition(Successful) |
9 |
|
Recognition(Unsuccessful) |
1 |
|
Recognition rate(Successful) |
90% |
|
Recognition Rate (Failure) |
10% |
|
Property |
Value |
|
Dataset Size |
35 |
|
Format |
JPG |
|
Resolution |
1280x720 |
|
Type |
Color |
|
Captured |
Real Time on Road |
Table 2. Dataset II Recognition for Vehicle Class Identification for Non Dataset Image
|
Property |
Value |
|
Dataset Size |
50 |
|
Format |
JPG |
|
Resolution |
1280x720 |
|
Type |
Color |
|
Captured |
Real Time on Road |
|
Size (Training) |
35 |
|
Size(Testing) |
30 |
|
Dataset Images |
No |
|
Number of Classes |
3 |
|
Recognition(Successful) |
26 |
|
Recognition(Unsuccessful) |
4 |
|
Recognition rate(Successful) |
86.66% |
|
Recognition Rate (Failure) |
13.34% |
Table 3. Dataset III Recognition for Vehicle Class Identification for Non Dataset Image
|
Property |
Value |
|
Dataset Size |
50 |
|
Format |
JPG |
|
Resolution |
1280x720 |
|
Type |
Color |
|
Captured |
Real Time on Road |
|
Size (Training) |
50 |
|
Size(Testing) |
40 |
|
Dataset Images |
No |
|
Number of Classes |
3 |
|
Recognition(Successful) |
35 |
|
Recognition(Unsuccessful) |
5 |
|
Recognition rate(Successful) |
87.5% |
|
Recognition Rate (Failure) |
12.5% |
Table 4 shows the cumulative performance analysis of model for vehicle classification into light, medium and heavy vehicle for dataset I, dataset II and dataset III. Table IV clearly stated that for dataset I author obtain 1 false match out of 10 test images taken from dataset, for Dataset II author obtained 4 false match out of 30 test images taken from non–dataset image and from dataset III 5 false match out of 40 test images taken from nondataset image by providing accuracy of 90%, 86.6% and 87% respectively.
Table 4. Performance Analysis of Devised System
|
Input Images |
Size (Traini ng) |
Size (Testing) |
Correct match |
False Match |
Accur acy |
|
Dataset I (35) |
25 |
10 |
9 |
1 |
90% |
|
Dataset II (50) |
35 |
30 |
26 |
4 |
86.6% |
|
Dataset I (50) |
50 |
40 |
35 |
5 |
87.5% |
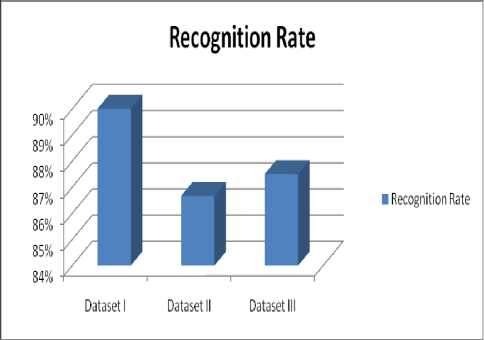
Fig.5. Recognition Rate Analysis of Vehicle Detection and Classification.
Fig. 5 shows the recognition rate obtained for different vehicle datasets as presented in Table 1 to Table 3. The first bar is showing the recognition rate obtained for a test set of 10 images. All the images are dataset images and provided the 90% recognition rate. The non–dataset images set provided the result of 86.66% and 87.5% respectively which shows that the investigated work has provided the significant results.
-
VI. Conclusion
Real-time image processing or object processing is having its significance in different areas such as traffic monitoring, currency identification, vehicle identification, hand gesture recognition, face recognition, detection of tumor etc. Vehicle Recognition has drawn considerable interest and attention from several researchers and authors in past. Vehicle detection and recognition is the application of image processing but still due to large variation in vehicle shape, size, color, a reliable recognition by machine is still a challenge. In present investigation, a Gaussian filter based SVM model has been applied for vehicle identification and vehicle class identification. The presented work has applied on real time vehicle images collected from real time source. The capturing from real time has been done in the form of video files which were later on transformed to image set. According to presented model, firstly the input training set and test image has transformed to feature image set. This transformation has been done using segmented Gaussian filter and accordingly the featured edge points are obtained over the dataset. As the feature set obtained, the SVM based distance analysis model has been applied to perform the recognition and classification of vehicle. The investigated model based on Gaussian filter and SVM approaches has been implemented in MATLAB environment to perform the recognition and classification. The results show that the presented work model has provided the significant high recognition rate over 90% for different dataset and non dataset real time vehicle images.
References A Gaussian Filter based SVM Approach for Vehicle Class Identification
- Habibu Rabiu, "Vehicle Detection and Classification for Cluttered Urban Intersection," International Journal of Computer Science, Engineering and Applications (IJCSEA), vol. 3, no. 1, pp. 37-47, Feb. 2013.
- Mehran Kafai and B. Bhanu, "Dynamic Bayesian Networks for Vehicle Classification in Video," IEEE Transaction On Industrial Informatics, vol. 8, no. 1, pp. 100-109, 2012.
- Amol Ambardekar, Mircea Nicolescu and George Bebis, "Efficient Vehicle Tracking and Classification for an Automated Traffic Surveillance System," International Conference on Signal and Image Processing, pp. 220-225, Aug. 2008.
- Hakki Can Karaimwer and Yalin Bastanlar, "Detection and Classification of Vehicles From Omnidirectional Videos Using Temporal Average of Silhouettes," Proceeding of 10th International Conference on Computer Vision Theory and Applications, pp. 197-204, 2015.
- Celil Ozkurt and Fatih Camei, "Automatic Traffic Density Estimation and Vehicle Classification for Traffic Surveillance Systems Using Neural Networks," Mathematics and Computational Applications, vol. 14, no. 3, pp. 187-196, 2009.
- Longbin Chen et al., "An Integrated System for Moving Object Classification in Surveillance Videos," IEEE Fifth International Conference on Advanced Video and Signal Based Surveillance, pp. 52-59, Sep. 2008.
- Ryan P. Avery, Yinhai Wang and G. Scott Rutherford, "Length-Based Vehicle Classification Using Images from Uncalibrated Video Cameras," Proceeding 7th International IEEE conference on Intelligent Transportation System, pp. 737-742, Oct. 2004.
- Kanwal Yousaf, Arta Iftikhar and Ali Javed, "Comparative Analysis of Automatic Vehicle Classification Techniques: A Survey," I.J.Image, Graphics and Signal Processing, pp. 52-59, Sep. 2012.
- Z. Sun, G. Bebis and R. Miller, "On-Road Vehicle Detection Using Evolutionary Gabor Filter Optimization," IEEE Trans. Intelligent Transportation Systems, vol. 6, no. 2, pp. 125-137, 2005.
- Zhiming Qian et al., "Video based Multiclass Vehicle Detection and Tracking," International Journal of Computer Science, vol. 10, no. 3, pp. 570-578, Jan. 2013.
- Yiling Chen and GuoFeng Qin, "Video-Based Vehicle Detection and Classification in Challenging Scenarios," International Journal on Smart Sensing and Intelligent Systems, vol. 7, no. 3, Sep. 2014.
- M. Vineela Rao and N. Venkateswar Rao, "Video Streaming With Dynamic Bayesian Networks," International Journal of Computer Science and Information Technologies, vol. 4, no. 3, pp. 505-509, 2013.
- Jeffrey B. Flora et al., "Exploring Image-Based Classification to Detect Vehicle Make And Model," TRID, pp. 1-22, 2013.
- Ioana Sporea and Andre Gruning, "Supervised Learning in Multilayer Spiking Neural Networks," MIT CogNet, vol. 25, no. 2, pp. 473-509, Feb. 2013.
- Xue Mei and Haibin Ling, "Robust Visual Tracking and Vehicle Classification via Sparse Representation," IEEE Transportation Pattern Analysis and Machine Intelligence, Vol.33, No. 11, pp. 2259-2272, 2011.
- Brendan Morris and Mohan Trivedi, "Robust Classification and Tracking of Vehicles in Traffic Video Streams," Proceedings of IEEE Intelligent Transportation Systems Conference, pp. 1078-1083, Sep. 2006
- Mohamed Elhoseiny, Amr Bakry and Ahmed Elgammal, "Multiclass Object Classification in Video Surveillance Systems Experimental Study," IEEE Conference on Computer Vision and Computer Recognition, pp. 788-793, June 2013.
- Suresh Babu Changalasetty et al., "Identification and Classification of Moving Vehicles on Road," Computer Engineering and Intelligent Systems, Vol. 4, No. 8, pp. 1-12, 2013.
- Michael Hodlmoser et al., "Classification and Pose Estimation of Vehicles in Videos by 3D Modeling within Discrete-Continuous Optimization,"12th proceeding of Second International Conference On 3D Imaging, Modeling, Processing, Visualization, and Transmission, pp. 198-205, Oct. 2012.
- Z. Chen, T. Ellis, and S. A. Velastin, "Vehicle Detection, Tracking and Classification in Urban Traffic," 15th International IEEE Conference on Intelligent Transportation Systems, pp. 951-956, Sep. 2012.
- Lam Hong Lee et al., "An Enhanced Support Vector Machine Classification Framework by Using Euclidean Distance Function For Text Document Categorization," Applied Intelligence, pp. 80-99, Aug. 2011.
- Chin-Teng Lin et al., "Support Vector based fuzzy Neural Network for pattern classification," IEEE Transactions on Fuzzy Systems, vol. 40, no. 1, pp. 31-41, Feb. 2006
- Wesal Abdallah and Li Hong, "Vehicle Logo Classification Using Support Vector Machine Ensemble," International Journal Of Computer Science Issues, vol. 10, no. 2, pp. 458-462, March 2013.
- Lee Teng Ng, Shahrel Azmin Suandi and Soo Siang Teoh, "Vehicle Classification Using Visual Background Extractor and Multi-Class Support Vector Machines," The 8th International Conference on Robotics, Vision, Signal Processing & Power Applications, vol. 291, pp. 221-227, Feb. 2014.
- V. Vapnik, "An Overview of Statistical Learning Theory," IEEE transaction on Neural Networks, vol. 10, no. 5, pp. 988-999, 1999.
- C. Cortes and V. Vapnik, "Support Vector Network," Machine Learning, vol. 20, pp. 1-25, 1995.
- C. Burges A Tutorial on Support Vector Machines for Pattern Recognition, Data Mining and Knowledge Discovery, vol. 2, pp. 121-167,1998.
- Reza Azad, "View-Independent Traffic Speed Sign Detection and Recognition System for Intelligent Driving System," I.J. Modern Education and Computer Science, vol. 3, pp. 31-37, 2014.
- F. Xianping, M. Yugang, Y. Guoliang, "A Driving Behavior Retrieval Application for Vehicle Surveillance System", IJMECS, vol.3, no.2, pp.44-50, 2011.
- Seyyed Mohammad Reza Hashemi1 and Ali Broumandnia, "A New Method for Image Resizing Algorithm via Object detection," International Journal of Mechatronics, Electrical and Computer Technology (IJMEC), vol. 5, no. 16, pp. 2355-2362, Jul. 2015.
