Аберрации второго порядка градиентной среды: методы расчета

Автор: Ильинский Р.Е., Ровенская Т.С.
Журнал: Компьютерная оптика @computer-optics
Рубрика: Дифракционная оптика, оптические технологии
Статья в выпуске: 16, 1996 года.
Бесплатный доступ
Короткий адрес: https://sciup.org/14058331
IDR: 14058331
Текст статьи Аберрации второго порядка градиентной среды: методы расчета
Покажем, что аналогичными свойствами обладают градиентные Среды с функцией распределения квадрата показателя преломления (ПП) вида:
n 2 ( x , У , z ) = ( n о ( z ) ) 2 5 N i ( z ) ( x 2 5 У 2 ) 5 32 (1)
+ N 2 ( z ),J ( x 2 + y 2 ) + N 3 ( z ) ( x 2 + y 2 ) + ... + .
Согласно [3] ход реального луча в градиентной среде описывается системой дифференциальных уравнений:
dT dt
= 2 v ( n 2 ( R ) ) = n ( R )v n ( R )
— = T (R) dt
где n (R) dt = (dx )2 +(dy )2 +(dz)2 ;
R = (x; y; z)T - радиус-вектор точки (x;y;z) на траек- тории луча;
T = ( p; q; l) T = n (R )(cos a;cos e;cos Y) T - вектор оптических направляющих косинусов; а; в; у - углы, оброазованные касательной в точке (x;y;z) с осями координат OX; OY; OZ соответственно;
T z А ( dn dn dn ) V n (R) = I —;---;— I
(dx dy dz J градиент ПП в точке
(x;y;z).
Рассмотрим бесконечно близкий к оптической оси луч. Для такого луча координаты точки на траектории и оптические направляющие косинусы можно представить в виде:
R = R + 5 R ;
T = T , axial
+ 5 T ,
где R axiai = ( 0;0; z ) T ; T axiai = ( ° ° n о ( z ) ) T ;
5 R = ( 5 x ; 5 y ; 5 z ) T и 5 T = ( 5 p ; 5 q ; 5 l ) T - бесконечно малые первого порядка малости.
Дифференциальные уравнения (2), (3) при бесконечно иалых 5 R и 5 T преобразуются в выражения:
|
n о ( z ) d i p = N i ( z ) 5 x ; dz |
(4) |
|
n о ( z ) d T q = N - ( z ) 5 у ; dz |
(5) |
|
/ x d 5 x _ n о ( z )—t" = 5p ; dx |
(6) |
|
l A d 5 y e n о ( z )t" = 5 q . dx |
(7) |
Система уравнений (4), (5), (6), (7) описывает ход параксиального луча в градиентной оптической среде [3]. Если обозначить через ц ( z ) n ( z ) углы параксиального луча с оптической осью в саггиталб-ном сечениях соответственно, то :
5 p ( z ) = - n о ( z ) ^ ( z )
5 q ( z ) = - n о ( z ) n ( z )
Вновь рассмотрим бесконечно близкий к оптической оси луч, учитывая теперь величины первого и второго порядка малости. В этом случае
R = Rm +5 5 R + - 5 2 R axial 2
T = Taxiai + 5T 5 2 52 T где 52R = (52x;52y;52z)T ; 52T = (52p;52q;521)T -бесконечно малые второго порядка малости.
Уравнения (2), (3) раскладываем в ряд Тейлора, сохраняя величины до второго порядка малости. После преобразований полученных выражений с учётом (4)-(7) имеем:
n0 ( z ) d ^ d-P. = N 1 ( z ) 5 2 x + 3 N 2 ( z ) 5 x ^( 5 x ) 2 + ( 5 y ) 2 (8) n о ( z ) d ^ dT = N 1 ( z ) 5 2 y + 3 N 2 ( z ) 5 y^ ( 5 x ) 2 + ( 5 y ) 2 (9)
n о (z) dyq = 5 2 p dz
/ \ d5 q e21 \ n о (z)™=5q dz
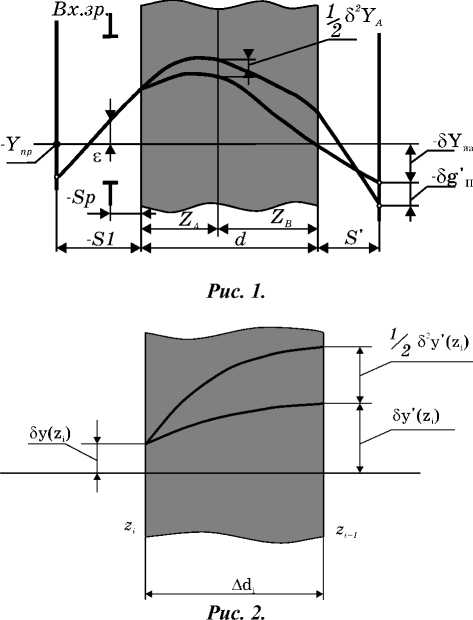
Рассмотрим находящийся в однородных средах пространства предметов и пространства изображений оптический элемент, представляющий ограниченную плоскими поверхностями градиентную среду с распределением ПП (1). Рассчитаем ход через этот элемент бесконечно близкого к оптиче- ской оси луча с учётом величин до второго порядка малости (рис. 1).
В среде пространства предметов имеем [3]: 8 Qi = - n n i = ( m - y np ) n i /( Sp - S i ) ; 8 2 q - = 0;
8 p 1 = - n p 1 = Mn 1 Д S p - S 1 ); 8 2 p 1 = 0. На первой поверхности элемента: 8 x 1 = S p 1 ; 8 2 x 1 = 0 ;
8 y 1 = S 1 n ; 8 2 y 1 = 0. Преломление луча на этой поверхности описывается формулами:
-np = 8p- = -nо (0)p(0) = 8p(0); 82p(0) = 0 ;
- n n 1 = 8 q 1 = - n 0 ( 0 ) n ( 0 ) = 8 q ( 0 ) ; 8 2 q ( 0 ) = 0. Значения координат 8 x 2 = 8 x ( d ) ; 8 y 2 = 8 y ( d ) ;
8 2 x 2 = 8 2 x ( d ) ; 8 2 y 2 = 8 2 y ( d ) и оптических направляющих косинусов 8 p 2 = 8 p ( d ) ; 8 q 2 = 8 q ( d ) ; 8 2 p 2 = 8 2 p ( d ) ; 8 2 q 2 = 8 2 q ( d ) в точке встречи луча со второй поверхностью (z=d) находятся в результате интегртрования дифференциальных уравнений (4)-(7) и (8)-(11) при начальных условиях: 8 x ( 0 ) = 8 x , ; 8 p ( 0 ) = 8 px; 8 y ( 0 ) = 8 y - ;
8 q ( 0 ) = 8 q 1 ; 8 2 x ( 0 ) = 8 2 x 1 ; 8 2 p ( 0 ) = 8 2 p 1 ;
8 2 y ( 0 ) = 8 2 y 1 ; 8 2 q ( 0 ) = 8 2 q 1 . Преломление луча на второй поверхности описывается формулами: - n 3 p 3 = 8 p 3 = - n 0 ( d ) p ( d ) = 8 p ( d ) = 8 p 2; 8 2 p 3 = 8 2 p ( d ) ; - n 3 n 3 = 8 q 3 = - n 0 ( d ) n ( d ) = 8 q ( d ) = 8 q 2; 8 2 q 3 = 8 2 q ( d ) .
Координаты точки встречи луча с плоскостью изображения с учётом первых и вторых порядков будут:
x = 8x + — 82 x u3u32 u3
y = 8y +—82 y u3u32 u3
где
8 x vk = 8 x 2 + 8 p 3 S'/ n 3 ; 8 2 x vk = 8 2 x 2 + 8 2 p 3 S 7 n 3 ;
8 уЦ к = 8 y 2 + 8 q з S 7 n 3 ; 8 2 yVK = 8 2 y 2 + 8 2 q 3 S 7 n 3 •
На основании (12) и (13) аберрации второго порядка луча равны:
8 g ‘ I = 2 8 2 yu 3 ;
8 G ‘, = - 8 2 x II
. u 3
Таким образом, задачу расчета аберраций второго порядка для градиентных сред можно считать решенной. Существенным недостатком изложенной методики является необходимость решения системы дифференциальных уравнений (8)-(11).
Рассмотрим усовершенствованную методику рассчета аберраций второго порядка, свободную от указанного недостатка. С этой целью разделим градиентную среду плоскостью на части А и В. В результате рассчета величин второго порядка малости через часть А в плоскости раздела частей А и В имеем 8 2 xA = 8 2 x ( zA ) ; 8 2 y A = 8 2 y ( z A ) ; 8 2 p A = 8 2 p ( za ) ; 8 2 q A = 8 2 q ( za ) •
Продолжая расчет величин второго порядка малости через часть В при начальных условиях 8 xBO = 8 x A ; 8 yBO = 8 y A ; 8 pBO = 8 p A ; 8 2 q BO = 8 2 q A , в плоскости изображения получим: 8 x u 3 ab ; 8 y u 3 ab ; 8 x u 3 ab ; 8 x u 3 ab •
Можно поступить иначе. Если в качестве начальных условий для расчета величин второго по-лядка малости через часть В принять 8 2 x BO = 8 2 y BO = 8 2 p BO = 8 2 q BO = 0 , то в плоскости изображения определим величины
82x ; 82yu38 82p3B; 82q3B. Рассчитаем также u3AB B через часть В до плоскости изображения параксиальный луч с начальными координатами 82 xbo = 82 x A; 82 yBO = 82 yA; 82 pbo = 82 pA;
82qBO = 82qA; в результате в плоскости изображения получим 825си 3ab ;82 y ;82p3 ab ;823 ab • u 3 ab
Т.к. общее однородное решение системы дифференциальных уравнений (4)-(7) подобно общему однородному решению системы дифференциальных уравнений (8)-(11), то выполняются равенства:
-
8 xu 3 AB = 8 xu 3 B + 8 x^ u 3 AB ;
-
8 y u 3 AB = 8 y 3 B + 8 y u 3 ab ;
-
8 p 3 AB = 8 p 3 B + 8 p 3 AB ;
-
8 2 q 3 AB = 8 2 q 3 в + 8 2 q 3 ab •
Для ЦООС в параксиальной области известен обобщеный инвариант Гюйгенса [3], справедливый при любом значении z в любой среде:
Q 0 = nAH - нД h =
= n 0 ( z ) a ( z ) H ( z ) — n 0 ( z ) e ( z ) h ( z ) = , (14) = n3 a 3 H 2 - n 3 p 3h 2 = n3 a 3 H u 3 - n3 P 3hu 3
где ( a ; h ) и ( P ; H) - углы и высоты двух произвольных параксиальных лучей; h u З и H u З - высоты этих лучей; h 2 и H 2 - высоты этих лучей на второй поверхности градиентного элемента.
Примем, что ( a ; h ) - угол и высота апертурного (первого вспомогательного [3]) параксиального луча, который пересекает плоскость изображения при h u З =0 [3]. Тогда высота H u З в плоскости изображения другого, входящего в инвариант (14) па-раксимального луча определяется как
Н = -Q 0-, u 3 a 3 n 3
где a 3 - угол первого вспомогательного луча в пространстве изображений.
Величина 32yu3AB находится из расчета пара- ксиального луча, поэтому для нее на основании уравнения (15) можно записать:
3 yu 3 AB
Ly a3 n 3 ’
где L y - меридиональный квазиинвариант [3]:
L y = 3 2 у ( zA ) n о ( zA ) a ( zA ) + h ( zA ) 3 2 q ( zA ) .
Аналогично для саггитального сечения:
2 x
3 xu 3 AB „ a3 n 3
где L x - сагиттальный квазиинвариант [3]:
Lx = 32 x ( zA ) n0 ( zA ) a ( zA ) + h ( zA ) 32 P ( zA ) .
Очевидно, что градиентную среду можно разделить не на две, а на любое количество m частей. Меридиональный и саггитальный квазиинварианты для каждой i -й части Среды определяются уравнениями:
L yi = 3 2 у ' ( z i ) n 0 ( z i ) a ( z i ) + h ( z i ) 3 2 q ' ( z i ) ;
Lxi = 32 x' ( zi ) n0 ( zi ) a ( zi ) + h ( zi ) 3 2 P '( zi ) ,
где zi+1 = zi + Аdi; a (zi+1) = a' (zi); h (zi+1) = h '(zi).
При этом в начале каждой i -й части среды примем: 3 2 x. = 3 2 y. = 3 2 p. = 3 2 q i = 0 .
Интегрированием системы дифференциальных уравнений (8)-(11) находим
3 2 x '( z i ) ; 3 2 y '( z i ) ; 3 2 p '( z i ) ; 3 2 q '( z i ) в конце каждой i -й части Среды (рис. 2). Суммарно от всех m частей градиентной Среды имеем:
-
a 3 n 3 3 2 xu 3 ^L; (16)
i = 1
m a3 n332 yu 3 = ^ Lyi i=1
Рассмотрим случай, когда величина A d i бесконечно малая. В этом случае для нахождения величин 3 2 x ‘ ( z i ) ; 3 2 y ‘ ( z i ) ; 3 2 p ‘ ( z i ) ; 3 2 q ' ( z i ) воспользуемся разложением в ряд Тейлора и с учетом (8)-(11) получаем:
3 2 x' (z .) = 3 2 x zzl ) + 33 x A d. =
( , ) ( , ) dz z = z i i ; (18)
= 3 2 x ( zi ) + 3 2 p ( z ) A di / n 0 ( z )
3 2 У ' ( zi ) = 3 2 У ( zi ) +
|
d 3 2 y |
|
|
= |
|
|
dz |
z = z i 1 ; (19) |
= 3 2 У ( zi ) + 32 p ( zi ) Adi /n 0 ( zi )
32 p ‘ ( z i ) = 32 p ( z i ) + d^ dz
A d i =
= 32 p (zi) + (N1 (z) 32 xi +
+ 3 N2 (zi) 3xi ^ (3xi)2 +(3yi )2) A di / n 0 (zi)
3 2 q ‘ ( z^ = 3 2 q ( z . ) + d ^ q dz
A d i =
z
= 32 q (zi) + (N1 (z) 32 yi +
+ 3 N2 (zi) 3yi ^ (3xi)2 +(3y,-)2)A di / n 0 ( zi )
;
.
Выражения (18)-(21) можно преобразовать, принимая во внимание, что
3 2 x (z) = 3 2 y (z) = 3 2 p (z) = 3 2 q (z) = 0 : 32 x'(zi. ) = 0; 3 2 y ‘(zi ) = 0; 32 p' (zi) = 3 N2 (zi) 3xi -J (3xi )2 +(3yi )2 A di /n 0 (zi); 32 q' ( z. ) = 3 N2 ( z. ) 3у. yj (3xJ2 +(3у.)2 A di /n 0 (zi.);
L xi = h ( zi ) 3 N 2 ( zi ) 3 xi J ( 3 x ) 2 +( 3 у , -) 2 a di In 0 ( z ) ;(23)
L yi = h ( zi ) 3 N 2 ( zi ) 3 У. ^ ( 3 xi ) 2 + ( 3 y , -) 2 A di In 0 ( zi ) .(24)
Заменяя в (16), (17) суммирование на интегрирование и учитывая (23), (24), получаем:
2 a 3 n 3 3 g ‘ I =
d h ( z ) 3 N2 ( z ) 3У ( z ) J (3x ( z ))2 +(3У ( z ))2
=j-----------TH-----------dz
0 n 0 ( z ) ; (25)
2 a 3 n 3 3 G I'I =
d h (z) 3 N2 (z) 3x (z) J (3x (z ))2 +(3y (z ))2
= j-----------Гы-----------dz
-
0 n 0 ( z ) . (26)
При этом 5 g’n и 5 G’ ii включают в себя все аберрации луча, в т.ч. дисторсию.
Рассмотрим расчет меридиональной сферической аберрации второго порядка. Из уравнения (25) при 5 x= 5 p=0; 5 y(z)=h(z); 5 q(z)=-n0(z) a (z) получаем:
d 3 N 2 ( z ) ( h ( z ) ( 3
2 a 3 n 3 8 g ‘ с ф = J dz . (27)
0 n 0 ( z )
Дисторсия второго порядка определяется уравнением
d
2 a 3 n 3 8 g II Dist = J
3N2 (z)( H (z)( H (z) h (z)(3
dz ,(28)
n 0 ( z )
где ( в ; Н ) - угол и высота полевого параксиального луча (второй вспомогательный луч [3]).
Может быть доказано, что если градиентный элемент ограничен не плоскостями, а сферическими поверхностями, то формулы (25) и (26) остаются в силе, т.к. сферические поверхности не вносят аберраций третьего порядка, а характерные для теории аберрации третьего порядка поверхностные составляющие [3] в теории аберрации второго порядка отсутствуют.
При наличии в оптической системе нескольких градиентных сред поперечная аберрация второго порядка описывается выражениями:
k
-
2а'n ^g I, = £ L yj ;
j = 1
k
-
2 а'n 8 G II = ^ L xj .
j = 1
где k - число градиентных сред: a‘ - угол первого вспомогательного луча в пространстве изображе- ний; меридиональный и саггитальный квазиинварианты для каждой j - среды определяются на основании вышеприведенных выражений:
d j
L , = J
h (z)3 N2 (z) 8, (z )V(8x (z ))2 + (8У (z ))2
n 0 ( z )
dz ; (29)
djh ( z ) 3 N2 ( z ) 8x ( z )V(8x ( z ))2 +(8, ( z ))2,
L j =J------------------ n rc z )------------------ dz -(30)
Все подинтегральные величины в (29), (30) соответствуют j -й среде.
Для градиентной оптической системы в виде градиентного стержня с плоскими поверхностями были вычисленны по формулами (25)-(28) поперечные аберрации второго порядка, а также аберрации реальных лучей. Длина стержня 23.5мм; функция распределения П: n 2 ( x , y , z ) = = 1.5 2 - 0.01 ( x 2 + y 2 ) - 0.0005 ^(x 2 + y 2 ) . Предметная плоскость бесконечно удалена от первой поверхности стержня; входной зрачок расположен на расстоянии -Sp=5 мм. Плоскость изображения совпадает с плоскостью Гаусса S’=41.29684*10-3 мм.
В таблице 1 приведены аберрации осевого пучка, вычисленные на основании расчета реальных лучей и с использованием формулы (27).
Дисторсия второго порядка, вычисленная для угла поля ю =-30’ с использованием выражения (28) и на основании расчета реального луча, равна 5 g’ D ist=-0.47599*10-3 и 5 g’ iiD iSt=-0.47970*10 " 3 соответственно. В таблицах 2 и 3 приведены значения аберрации наклонного пучка ( ю =-30’) в меридиональном и сагги-тальном сечениях, определенные на основе расчета хода реальных лучей и по формулам (25), (26).
Высоты лучей во входном зрачке подобраны таким образом, чтобы влиянием аберрации третьего, четвертого и более порядка можно было пренебречь. Результаты расчета по формулам (25)-(28) теории аберрации второго порядка имеют хорошее совпадение с результатами расчета реальных лучей.
