Адаптация и совместимость современной техники

Автор: Носенков А.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Технологические процессы и материалы
Статья в выпуске: 4 (7), 2005 года.
Бесплатный доступ
Рассмотрена роль адаптации в обеспечении совместимости современной техники на примерах трибосис-тем, радиотехнических объектов и кибернетических систем.
Короткий адрес: https://sciup.org/148175112
IDR: 148175112 | УДК: 60:62:167.7
The adaptation and compatibility of modern engineering
In article the role of adaptation in maintenance of compatibility of modern engineering on examples of tribosystems, radio engineering objects and cybernetic systems is considered.
Текст научной статьи Адаптация и совместимость современной техники
F TP = Q 1р + £ с , (1) где 5 гр - теплота, выделяемая при трении.
Величины F гр и F Tp JQ тр зависят от внешней нагрузки, скорости относительного перемещения трущихся поверхностей, их материалов, характеристик рабочей среды и других условий трения. При нормальных условиях трения и изнашивания величина 8 С не превышает 1 % от силы трения F , хотя последняя никогда не переходит полностью в теплоту. При малых значениях 8 С процесс находится в динамическом равновесии. Энергия 8 С идет в основном на образование вторичных структур, обеспечивающих стабилизацию скорости изнашивания.
Конечно, специалисты-кибернетики, ассоциирующие, например, понятие самоорганизации с понятием искусственного интеллекта, могут категорически возразить специалистам-механикам, что такое простое явление отнесено к высшему классу адаптации. Дело в том, что адаптация - это свойство системы изменять свое поведение с целью сохранения, улучшения или приобретения новых характеристик в условиях меняющейся во времени среды, априорная информация о которой является неполной [1]. Адаптивность проявляется при наличии у системы определенного механизма изменения параметров, стратегии управления или структуры на основе информации, поступающей в процессе функционирования системы, т. е. при взаимодействии ее с другими системами и (или) средой.
В механических системах, относящихся, как правило, к классу так называемых трибосистем, такая адаптив ность, разумеется, отсутствует. Тут большее внимание привлекает другое обстоятельство: изложенное свойство трибосистем является важным условием обеспечения совместимости трущихся поверхностей и представляет несомненный интерес для отрасли машиностроения, особенно для специалистов, занятых эксплуатацией станочного парка, автотранспорта и другой техники, структурно содержащей узлы трения.
Адаптация радиотехнических объектов. Более масштабное исследование получила адаптация радиотехнических объектов (РТО) [1]. Здесь разработана даже целая система ее классификации: по месту адаптации в РТО (адаптация на приемной, на передающей стороне и адаптация РТО в целом), адаптация по входному сигналу, по дальности работы, по достоверности приема информации, при смене режимов работы, как компенсация или устранение радиопомех.
Рассмотрим на примере радиотехнического объекта-ретранслятора (см. рисунок) связь адаптации и технической совместимости (ТС). Этот РТО, предназначенный для ретрансляции информации (РИ) и во многом аналогичный радиосистеме целевого назначения (РЦН) космических аппаратов связи (КАС), имеет радиоприемное устройство (РПрУ), радиопередающее устройство (РПдУ), блок преобразования (БП), измеритель параметров среды (ИПС) и устройство управления (УУ). ИПС регулярно выдает в УУ информацию о параметрах среды (ПС), например о помеховой обстановке. УУ принимает решение о необходимых изменениях параметров РТО с целью оптимизации его работы и реализует это решение выдачей управляющих воздействий (УВ) на РПдУ, РПрУ и БП. Контроль их работы осуществляется по анализу контрольной информации (КИ).
Адаптация по входному сигналу используется в РПрУ за счет применения автоматического режима усиления (АРУ) и автоматической подстройки частоты (АПЧ). В результате улучшается частотная избирательность РПрУ, что благоприятно отражается на электромагнитной обстановке (ЭМО) РТО.
Адаптация по дальности представляет наибольший интерес для ТС. Она осуществляется путем изменения мощности РПдУ в соответствии с дальностью L работы. При этом можно получить не только экономию электроэнергии, но улучшить скрытность, а также ЭМО для других радиосредств. С другой стороны, при работе на дальности L < L (где L - предельная дальность) имеется возможность увеличить скорость V передачи информации, т. е. пропускную способность радиолинии. Это выполнимо, так как с уменьшением L возрастает мощность сигнала W . на входе РПрУ Как известно по формуле Шеннона, с увеличением W повышается V [1]. В этом можно убедиться, используя выражения
-
V . =А f log 2 ( W c / W л ) , (2)
W c = B / L 2 , (3)
где Аf - полоса пропускания; Wm - мощность шума; В - коэффициент, имеющий постоянную величину при W»W : с ш в = Wj A, (4)
здесь W , - пороговое значение сигнала на входе РПрУ; А - постоянный коэффициент.
После подстановки (4) в (3), а затем во (2) получим выражение
-
V = А f log 2 [(V AL 2 )( W 0 W ) ] , (5)
по которому видно, что с уменьшением L увеличивается V . Такой факт можно полноправно рассматривать как улучшение функциональной совместимости (ФС) РТО. Правда, для этого необходимо еще синхронизировать работу радиосредств абонентов с радиосредством РТО.
Адаптация по достоверности приема осуществляется для РТО в целом. Если, например, ухудшается прием за счет действия помех, то уверенный прием обеспечивается повторением сигнала. Такое мероприятие можно считать направленным на поддержание ФС в условиях ухудшения помеховой совместимости. Иногда то же самое достигается и за счет перехода работы РТО на другой диапазон частот.
Адаптацию путем смены режимов работы радиосредств также можно считать мероприятием по поддержанию ФС. Если же при этом проектировщиками решен вопрос по достаточно оперативному поиску оптимального режима передачи информации, то такая адаптация может рассматриваться как мероприятие по повышению помеховой и функциональной совместимости.
Адаптация путем компенсации или устранения радиопомех имеет разнообразные методы и схемные решения, но в любом случае может считаться мероприятием по повышению помеховой совместимости, так как осуществляется через автоматическую реакцию РТО на помехи и противодействие им. Здесь не исключается возможность улучшения и ФС.
Адаптация технических кибернетических систем. Наибольшее количество работ по адаптации техники принадлежит технической кибернетике [2.. .4; 6.. .9]. Проводимые в этой области исследования весьма многочисленны и многогранны, чтобы по затронутым в данной статье вопросам дать хотя бы краткий их анализ. Поэтому остановимся лишь на одной из областей технической кибернетики, а именно: технической диагностике (ТД) [4; 8].
В настоящее время разработан целый ряд методов построения процедур поиска отказов и методов оптимизации этих процедур по различным критериям и показателям. К наиболее совершенным из их числа относятся методы теории распознавания отказов (РОт). Задача РОт как задача диагностирования заключается в определении состояния объекта (задача наблюдения состояния) и отнесении его к одному из заданных видов технического состояния (задача классификации) [4; 7].
Чтобы более полно ответить на вопрос о связи адаптации и совместимости, необходимо хотя бы кратко остановиться на принципиальной сути процесса РОт [4].
При выполнении задачи наблюдения на основе выходного процесса ^ ( t ) определяется неизвестное состояние объекта z ( t ). В формальном виде эта задача сводится к решению относительно z ( t ) уравнения
-
^[ t , z ( t ) , x ( t ) , т ]= y ( t ) , (6) где x ( t ) - входной сигнал объекта.
Объект диагностирования (ОД) называется наблюдаемым в состоянии z ( t ) на множестве моментов времени T = { т } при входном воздействии х ( t ) и отсутствии воз-
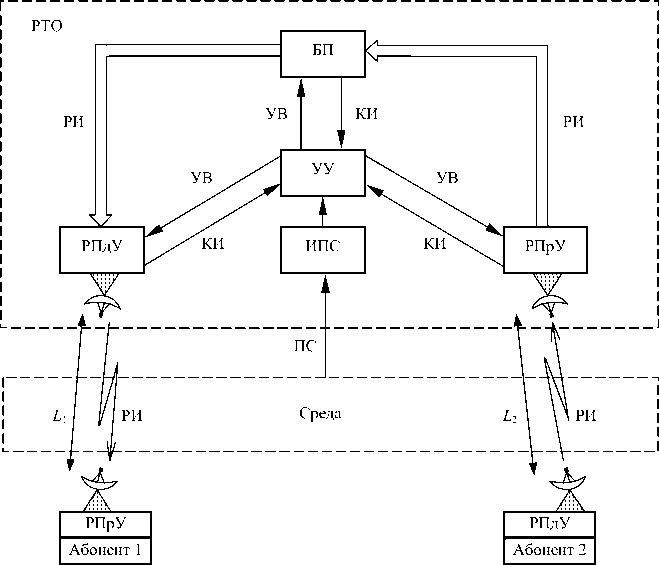
Функциональная схема радиотехнического объекта-ретранслятора (обозначения см. в тексте)
мущений, если (6) имеет единственное решение. ОД называется полностью наблюдаемым, если это утверждение справедливо для любого z (t )e Z с х n,
где Z- п -мерное евклидово пространство (пространство состояний ОД); х n - множество вещественных чисел.
Задача классификации сводится к определению класса, к которому относится наблюдаемое состояние ОД. Для этого при поиске, например, отказавшего элемента все множество Z состояний ОД разбивается на т + 1 подмножеств Ai (i = 0, m), где A - подмножество работоспо собных состояний; Ai (i = 1, m) - подмножества неработоспособных состояний, обусловленных любыми неисп- равностями одного и того же i-го элемента.
Чтобы решить, к какому подмножеству из Ai принадлежит конкретное состояние z, необходимо найти рас- стояние точки до каждого подмножества Ai: Р(z, ДО = inf р(z, z^)
z ; е Д
Считается, что состояние z относится к классу z., если выполняются условия:
P ( z, A i) = mmp ( z, A k ) ; k = 1, m
P(z,ДО 5 suPP(zs,z*} zV e »i, (10)
z V e A ,
Отображая пространство точек Zc в пространство выходных сигналов У, можно каждой области Ai в пространстве Zс поставить в соответствие область yi в пространстве У. Тогда изображение распознаваемого состо яния можно записать в виде вектора
& = ( С 1 , С 2 ,..., С , ) Т , (11) в котором компоненты С 1 , ..., С l есть признаки любого вида.
Для распознавания испытуемого состояния используются заранее сформированные эталонные изображения (ЭИ), число которых равно заданному числу классов состояний ОД. Все ЭИ также представляются в виде векторов
МС з , Сй, ..., Со ) Т ,i =U m , (12)
компонентами которых являются некоторые признаки, описывающие свойства данного класса.
Тогда задача классификации (распознания) состояний ОД формируется следующим образом. Имеется набор классов состояний (или алфавит классов) ОД
У = { У 1 , У 2 ,..., yt , ..., У m } , (13)
каждый из которых задан своим эталонным изображением (12). Требуется определить, к какому из классов (13) относится изображение (11) текущего состояния ОД. Математически это сводится к определению вектора di-из (12), с которым вектор (11) имеет наибольшее сход ство. Решающее правило имеет вид d e Уi ^ р(d, di). . = max р(d, dk ) k =1, m где р(d, di)- некоторая мера сходства сравниваемых век
торов d и d i ( i = 1, m ) , в качестве которой используют, например, скалярное произведение этих векторов:
-
p ( d , d i ) = ( d , d i ) =£ jij . (15) j = 1
Всякое состояние d i - = ( C i 1 , C i 2 , ..., C it ) т ОД случайно, а признаки С 1 , С 2, ..., С l - случайные величины. Вероятностные характеристики состояний ОД могут быть получены за счет обучения модели распознанию случайных отказов, которые, как правило, непрогнозируемы.
Все разработанные к настоящему времени алгоритмы обучения сводятся к одной и той же математической схеме: строится некоторая разделяющая функция по «отказам» обучающих векторов у = ( у 1 , у 2 , ..., у, ) с указанием, к какому классу они принадлежат. В ходе реализации алгоритма обучения по наблюдаемым значениям век-тора у получается либо оценка вектора g ( к ) на очередном к -м шаге, если вектор изменяется дискретно, либо оценка вектора g ( t ), если он непрерывен. Для дискретного случая алгоритм обучения имеет вид
g ( k ) = g ( k - 1 )- Г ( k )V g v[ у ( k ) , g ( k — 1 ) ] , (16) где Г( к ) - квадратная / -мерная диагональная матрица, элементы которой есть значения ^ ( к ), на которые изменяются компоненты искомого вектора g на каждом к -м шаге; V g - градиент случайной функции v [ • ] по g .
Смысл обучения заключается в установлении общих свойств изображений, включенных в один класс, поэтому каждый искомый коэффициент g можно считать весовым коэффициентом, показывающим вклад признака у. в общую меру сходства изображений. При использовании алгоритма (16) практически требуется определить такое число к = к*, которое обеспечивает приемлемую точность установления весовых коэффициентов.
При реализации процедуры обучения, как правило, не стремятся получить точные результаты из-за больших затрат ресурсов. Считается достаточным получить приближенное значение искомого вектора g , позволяющего распознавать новые изображения, принадлежность которых к тому или иному классу не установлена. Апостериорная информация, полученная в результате распознавания этих изображений, используется для уточнения значений вектора g и получения такого его значения g*, при котором достигается минимальная вероятность ошибочных решений при распознавании. Такой процесс уточнения ранее полученных результатов называется самообучением.
Для осуществления обучения используют физическое или математическое (имитационное) моделирование различных отказов. Для этого в каждый блок заведомо исправного ОД (или его модели) вводятся отдельные дефекты (неисправности), и при этом фиксируются значения всех контролируемых выходных сигналов у . при подаче на вход ОД сигналов, имитирующих внешние возмущения.
Анализируя изложенные выше материалы на предмет выявления элементов адаптации систем РОт, можно констатировать наличие их в двух проявлениях. Во-первых, система РОт, периодически обучаясь или самообу-чаясь, тем самым приспосабливается к более совершенному выполнению своих задач. Во-вторых, способность к обучению также является одним из проявлений адап- тивного свойства системы РОт Наконец, в обоих проявлениях адаптации повышается функциональная совместимость пар: 1) «ОД - система РОт» и 2) «система РОт -система обучения (учитель)».
Таким образом, материалы представленной статьи позволяют, по мнению автора, достаточно полно представить роль адаптации в обеспечении совместимости технических систем. Эффективность адаптации заключается прежде всего в том, что она осуществляется автоматически и направлена на улучшение (в пределе - на оптимизацию) процесса функционирования. В этом и видна связь адаптации с функциональной совместимостью техники. А для радиотехнических объектов хорошо просматривается роль адаптации в обеспечении помеховой совместимости.
