Адаптивная обучаемая модель обнаружения уязвимостей интерфейсов БТС на основе вероятностных автоматов

Автор: Скатков А.В., Брюховецкий А.А., Моисеев Д.В.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Электромагнитная совместимость и безопасность оборудования
Статья в выпуске: 2 т.20, 2022 года.
Бесплатный доступ
Целью данной работы является разработка модели, которая предоставляет возможности исследования процессов обнаружения уязвимостей интерфейсов БТС в условиях динамически меняющейся внешней среды. Рассматривается алгоритмический подход, базирующийся на методах адаптивной интеллектуальной технологии контроля состояния ресурсов БТС. Представлена адаптивная самообучаемая модель с использованием вероятностного оценивания изменения состояний ресурсов и методов непараметрической статистики.
Вероятностный автомат, динамическое оценивание ресурсов, адаптивная обучаемая модель, самонастройка
Короткий адрес: https://sciup.org/140296726
IDR: 140296726 | УДК: 519.8 | DOI: 10.18469/ikt.2022.20.2.12
Adaptive trainable model for detecting vulnerabilities of UMV interfaces based on probabilistic automates
The purpose of this work is to develop a model that will provide an opportunity to study the processes of detecting vulnerabilities of UMV interfaces in dynamically changing external environment. An algorithmic approach based on adaptive intelligent technology methods for monitoring of the state of UMV resources is considered. An adaptive trainable model using probabilistic estimation of changes in the stateof UMV resources as well as nonparametrical statistics methods are presented.
Текст научной статьи Адаптивная обучаемая модель обнаружения уязвимостей интерфейсов БТС на основе вероятностных автоматов
Предлагаемый в статье подход ориентирован на решение задач обнаружения моментов времени изменения состояния контролируемых ресурсов БТС, каковыми являются ресурсы: канал связи, процессор, память. При этом скорость и достоверность оценки ситуации может иметь решающее значение. Реализация таких задач в реальном времени не всегда возможна с помощью аналитического подхода, поскольку эти задачи характеризуются противоречивостью, нелинейностью, недифференцируемостью, многоэкстре-мальностью, сложной топологией области до- пустимых значений, высокой вычислительной сложностью оптимизируемых функций, высокой размерностью пространства поиска и т. п. В условиях дефицита априорной информации большая часть проблем анализа данных связана с исследованиями стохастических систем [1–2]. Одним из наиболее эффективных инструментов моделирования сложных стохастических систем является методология вероятностно-автоматного моделирования [3]. Вероятностные автоматы используются в таких областях, например, как: логическое управление, математическая лингвистика, теория формальных языков, моделирование поведения человека, при описании моделей информацион- ной защиты предприятия и др. Продуктивность указанной методологии обусловлена возможностью построения унифицированных моделей для широкого класса систем и использованием систем поддержки принятия решений при необходимости в точной оценке выбора различных альтернатив на основе вероятностных автоматов.
Настоящая работа посвящена применению модели обучаемых вероятностных автоматов для обнаружения уязвимостей объектов, к числу которых, например, относятся интеллектуальные системы управления беспилотными воздушными и наземными транспортными средствами, системы, обеспечивающие межмашинное взаимодействие с использованием технологии интернета вещей и др. Разнородность приложений и беспроводных коммуникаций в инфраструктуре умного города существенно усложняет обеспечение безопасности объектов [4]. Методы предупреждения атак для безопасной эксплуатации транспортных средств должны быть динамичными и реагировать на возможные угрозы. Упреждающий подход к угрозам должен быть ключевым требованием, которое должно быть выполнено. Однако поскольку невозможно предсказать все возможные угрозы для БТС, то важно, чтобы в результате атаки у пользователей было как можно меньше нарушений [5–7].
В настоящее время известны различные вероятностные автоматные модели. Причина разнообразия автоматных моделей объясняется широтой области их применения.
Постановка задачи
Целью работы является разработка адаптивной модели с использованием вероятностного оценивания состояний ресурсов БТС. Модель базируется на основе вероятностного автомата с адаптивной самонастройкой. На основе предлагаемой модели решается задача оценки состояний ресурсов с целью повышения достоверности результатов классификации информационных ситуаций. Обозначим
R = { Ri ,..., Rj,^, Rr} множество контролируемых ресурсов БТС. Определим контролируемые характеристики ресурсов, по которым будем оценивать их состояние (значения характеристик нормированы, определены в диапазоне [0;1]): Dj – загрузка j-го ресурса, Vj - скорость изменения Dj, где V = = ( D (tt)-D (^))/ At.
Указанные характеристики – векторные величины с компонентами элементов множеств R j .
S*o s', ......... S*j
O Io /1 lj-i 1
Рисунок 1. Области различия состояний S t ресурса R j
Обозначим Stj – состояние i -го ресурса в момент времени t . При достаточно общей постановке задачи речь идет о контроле результатов наблюдений над состоянием ресурсов БТС. Значения состояний определены и нормированы в диапазоне [0;1]. Пусть состояния определены на интервалах [ I k ; I k + 1 ] , где I k - порог для задания области определения состояния ресурса, к = = 0 , 1 ,..., j . На рисунке 1 приведен пример различия состояний Stj ресурса Rj на интервалах
S 0 е [ 0 ; I о ] , S t e ( 1 0 ; 1 1 ] ,..., S j е ( I ^] .
Без потери общности далее будем рассматривать три возможных состояния ресурса - S 0 , S 1 , S 2 . Предположим, что область с номером «0» обозначает нормальное состояние ресурса, область с номером «1» – предкритическое состояние, а область с номером «2» – критическое состояние.
Основной задачей является адаптивная оценка значений вероятности состояний ресурсов БТС, сформированных для нормального поведения ресурса на временном интервале T и полученных значений в результате внешнего воздействия на интервале Твнеш . Применение указанной модели позволит получить достоверные оценки гипотез появления состояний S i .
Метод обнаружения изменения состояния ресурсов БТС
Будем фиксировать изменения состояния Stj ресурса на временном интервале TN в моменты времени { t 0 , t 1 , .„, t j , .„ , t n } c использованием автоматной вероятностной модели. Каждому такту сопоставляется входной сигнал о состоянии ресурса – Х , выходной сигнал – Y и сигнал о внутреннем состоянии – S . Будем рассматривать автоматную модель Мура:
£ = ( S , X , Y , Ф , V , S h ) , (1) где S H e S - начальное состояние, S - множество значений вектора состояния, X – множество значений входного вектора, Y – множество значений выходного вектора, Φ – функция переходов, Ψ – функция выходов.
В этом случае элементы матриц переходов и выходов представляют собой соответствующие
Таблица 1. Пример начального распределения состояний вероятностного автомата
|
* ( s j ( t +1 ) ) |
Y ( t +1 ) |
Y ( t +1 ) |
Y j ( t +1 ) |
Y m ( t + 1 ) |
||
|
ф ( s j ( t ) , x ( t ) ) |
S o ( t + 1 ) |
S ( t +1 ) |
S j ( t +1 ) |
S m ( t + 1 ) |
||
|
S . ( t ) |
P 0 |
P 1 |
P j |
P m |
Таблица 2. Таблица переходов Ф ( S i j k ) вероятностного автомата
|
S o ( t + 1 ) |
S 1 ( t +1 ) |
s , ( t +1 ) |
S m ( t + 1 ) |
||||
|
x ( t ) |
S 0 ( t ) |
Г ,0,0 |
r ,0,1 |
r ,0, j |
r i ,0, m |
||
|
x ( t ) |
S 1 ( t ) |
Г ,1,0 |
ri -,1,1 |
r ,1, j |
r i ,1, m |
||
|
x ( t ) |
S j ( t ) |
r , j ,0 |
r ., i , j ,1 |
r . . i , j , j |
r i , J , m |
||
|
x ( t ) |
s. ( t ) |
r. „ r i , m ,0 |
r. . r i , m ,1 |
ri , m , j |
r i , m , m |
Таблица 3. Таблица выходов ^ ( Y i j ) вероятностного автомата Мура
|
Y , ( t + 1 ) |
Yx ( t +1 ) |
Y j ( t +1 ) |
Y m ( t + 1 ) |
|||
|
S 0 ( t + 1 ) |
q 0,0 |
q 0,1 |
q 0, j |
q 0, m |
||
|
S 1 ( t +1 ) |
q 1,0 |
qv |
q^j |
q 1, m |
||
|
S ( t +1 ) |
q j ,0 |
q j1 |
q j,j |
q j , m |
||
|
S m ( t + 1 ) |
q m ,0 |
q m ,1 |
q m , j |
q m , m |
оценки вероятностей переходов между состояниями. Введем правила для указанных переходов: r ( s j ( t +1 )) = Ф ( s j ( t ), x ( t )) - вероятность перехода в новое состояние, q ( у , ( t +1 )) = T ( s j. ( t +1 )) - вероятность появления выходного сигнала, где j = 1 , m, m - число состояний автомата, t = 0,1,2, ....
В начальный момент времени t автомат находится в состоянии S . . В этот момент времени выходной сигнал не вырабатывается. Для начального состояния задается распределение вероятностей перехода P j во внутренние состояния S j ( t ). Начальное распределение состояний для примера приведено в таблице 1.
Начальное распределение вероятностей состояний формируется на основе априорной информации, которая может быть получена, например, в процессе нормального функционирования БТС при отсутствии внешних возмущений.
В таблице переходов задаются оценки вероятностей перехода в состояние Sk (t +1) в зависимости от состояния Sj (t) при условии поступления сигнала xi (t). Обозначим эту вероятность - j. В каждой строке матрицы вероятности перехода образуют полную группу: ^ r j k = 1. Ниже при-k=0
веден пример таблицы переходов (таблица 2) при входном сигнале x i ( t ) . Число таких таблиц равно числу состояний x i ( t ) .
Таблица выходов автомата Мура (таблица 3) упрощается по сравнению с автоматом Мили, так как выходной сигнал Y зависит только от внутреннего состояния S и не зависит от входного сигнала X. Обозначим qij – вероятность появления выходного состояния Yj (t +1) при условии, что автомат находился в состоянии Si (t +1), при m этом £ qi j = 1.
j = 0
Как и начальное распределение вероятностей состояния, матрицы ф ( S i j k ) и ф ( S' , , j , k ) формируются на основе априорной информации в режиме обучения в процессе нормального функционирования БТС при отсутствии внешних возмущений.
В рабочем режиме функционирования БТС подвержен влиянию внешних воздействий, которые приводят к изменению значений априорных вероятностей. С целью учета влияния внешних факторов предлагается на основе апостериорной информации, получаемой в процессе контроля состояния ресурсов БТС, использовать адаптивную модель, базирующуюся на оценке однородности распределений числа «поощрений» («штрафов») для каждого элемента формируемых матриц SP ( Тнорм ) на этапе обучения и SP(Твнеш) в процессе контроля. В каждом такте автомат формирует сигнал поощрения (штрафа) в зависимости от выполнения условия: Sk (t +1) = = Sk (t). Если условие выполняется, то соответствующий элемент матрицы поощрения (штраФа) SPk (Тнорм) на этапе обучения или в рабочем режиме SPk (Твнеш) увеличивается на 1. При этом происходит перерасчет вероятностей матриц переходов по следующим формулам (модель Буша – Мостеллера [8]):
r ( t + 1 ) = в r ( t )/ ( 1 - ( 1 -в ) r ( t ) ) , (2) r j ( t + 1 ) = r j ( t )/( 1 -( 1 -p) r k ( t ) ) , j * k .
При получении сигнала «штраф» перерасчету подлежат вероятности по формулам (2), только вместо коэффициента β используется коэффициент α. Значения коэффициентов выбираются из условий: p > 1 , a < 1 .
В зависимости от оценки величины неоднородности матриц SP ( Т норм ) , SP ( Т внеш ) определяется принадлежность к одному из возможных классов. Величина неоднородности может быть получена при оценке дивергенции Кульбака – Лейблера [9] при сравнении указанных матриц. Переход системы в состояния S 0 , S 1 , S 2 случайный, что имеет место, когда не осуществляется целенаправленного воздействия. Такое состояние ресурсов относится к нормальному состоянию БТС. Если матрицы (поощрений или штрафов) значительно отличаются друг от друга, то из этого можно сделать вывод, что состояние БТС подвержено внешнему воздействию – атаке.
Введем обозначение D ( SP(Т норм X SP(Т внеш )) расхождения между двумя распределениями SP ( Т норм ) и SP ( Т внеш ) . Тогда Дивергенция определится как
n
D ( SP ( Т норм ), SP ( Т внеш ) ) = Z SP k ( Т норм ) Х к = о (3)
х ( 10g ( SP k ( Т норм )/ SP k ( Т внеш ) ) ) .
С целью сравнения оценок расхождений между распределениями на временном интервале Tнорм и исследуемым Tвнеш определим понятие зоны оценки величины расхождения для каждого состояния ресурса S0, S1, S2. Будем для определенности рассматривать следующие зоны клас- сификации: [0;Z 1), [Z1;Z2), [Z2;Z3]. В зависимости от принадлежности текущего значения расхождения D (SP(Тнорм X SP(Твнеш)) е Zi (i = 1,k) будем классифицировать следующие информационные состояния ресурсов на примере трех состояний:
D ( SP ( Т норм ), SP ( Т внеш ) ) < Z 1
– отсутствие расхождения (нормальное состояние),
Z 1 ^ D ( SP ( Т норм ), SP ( Т внеш ) ) < Z 2
– неустойчивая область (предкритическое состояние),
Z 2 ^ D ( SP ( Т норм ), SP ( Т внеш ) )
– наблюдение расхождения (критическое состояние).
Алгоритм классификации состояния ресурсов
БТС, принадлежащих каждому из возможных классов, содержит следующую основную последовательность действий.
– Задается начальное распределение вероятностей - Pнj , состояний переходов и выходов, значения n , m , V.
– Определяются вероятности переходов – r i j k и вероятности выходов - q i j на этапе обучения автомата, формируется матрица поощрений (штрафа) SP k ( Т норм ) .
-
- По значению входного сигнала x ( t i ) и состояния автомата S j ( t ) из матрицы ||ф ( S i j k )|| выбирается строка r , j , 0 , т ^, j , 1 , ^ , r , j , m .
-
- Разыгрывается вектор состояний S j ( t ) и выбирается элемент r i j k, формируется новое внутреннее состояние Sk ( t +1 ) , k = 0,1 , ^ , m .
– Выполняется проверка совпадений состояний автомата в соседние моменты времени, и формируются сигналы «поощрение» («штраф»):
-
1 SP k ( Т внеш ) = SP k ( Т внеш ) + 1
SP k ( t + 1Месли S k ( t +1 ) = S k ( t ) ;
0 , если Sk ( t +1 ) * Sk ( t ) .
– Выполняется перерасчет вероятностей по формулам (2).
-
- По значению Sk ( t +1 ) состояния автомата из матрицы ||т( Y i j )|| выбирается строка q j . 0 , q j ,1 , ^ , q j , m .
-
- Разыгрывается вектор состояний Sk ( t +1 ) , и выбирается элемент q j k, формируется новое выходное состояние Yk ( t +1 ) , k = 0,1 , ^ , m .
План экспериментов включает задание априорных вероятностей PнJ , P j k , объема выборки – V , закона распределения генерируемой по-
Динамика состояний ресурса
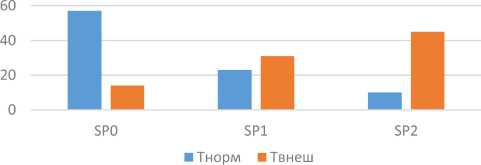
Рисунок 2. Динамика состояний ресурса, полученная в результате моделирования на временных интервалах T и T с указанием числа поощрений SP k (Т^ ), SIP (Т внеш )
следовательности, границ интервалов состояний и др. Основная цель – провести моделирование процесса обнаружения изменения состояния ресурсов БТС на основе апостериорной информации, определить оценки вероятностей появления состояний S 0 , S 1 , S 2 ; обеспечить поддержку принятия решения при оценке влиянии стохастической среды и внесении внешнего воздействия; с помощью критериев непараметрической статистики получить оценки влияния внешнего воздействия. Полученные статистические результаты экспериментов используются для выбора значений параметров модели с учетом конкретных условий различия состояний ресурсов.
На рисунке 2 представлены значения элементов матриц поощрения SP ( Т н О р М ), SP ( Твнеш ), полученные в результате моделирования на интервалах Т норм и Т вНеш . Причем на интервале Т внеш в поток данных были внесены возмущения [10], которые привели к увеличению предкритиче-ских, критических состояний и уменьшению числа нормальных состояний.
Заключение
В статье рассмотрен алгоритмический подход обнаружения уязвимостей интерфейсов БТС на основе самообучаемых вероятностных автоматов. Предлагаемый метод ориентирован на обнаружение изменения состояния контролируемых ресурсов БТС: канал связи, процессор, память. Метод базируется на применении адаптивной модели вероятностного автомата. Апостериорная информация о состоянии ресурсов в процессе функционирования БТС используется для адаптации к воздействиям внешней стохастической среды.
Предложенный адаптивный подход приведет к повышению достоверности и оперативности процессов поддержки принятия решений в задачах обеспечения безопасности объектов критической информационной инфраструктуры «Умный город».
Работа выполнена при частичной поддержке Российского фонда фундаментальных исследований (грант № 19-29-06015, 19-29-06023).
Список литературы Адаптивная обучаемая модель обнаружения уязвимостей интерфейсов БТС на основе вероятностных автоматов
- Ширяев А.Н. Вероятностно-статистические методы в теории принятия решений. 2-изд., новое. М.: МЦНМО, 2014. 144 с.
- Скатков А.В., Брюховецкий А,А., Моисеев Д.В. Интеллектуальная система мониторинга для решения крупномасштабных научных задач в облачных вычислительных средах // Информационно-управляющие системы. 2017. № 2 (87). С. 19-25.
- Поспелов Д.А. Вероятностные автоматы. М.: Энергия, 1970. 88 с.
- Зегжда П.Д., Полтавцева М.А., Лаврова Д.С. Систематизация киберфизических систем и оценка их безопасности // Проблемы информационной безопасности. Компьютерные системы. 2017. № 2. С. 127-138.
- Cyber security attacks to modern vehicular systems / L. Pan [et al.] // Journal of Information Security and Applications. 2017. Vol. 36. P. 90-100.
- Markovitz M., Wool A. Field classification, modeling and anomaly detection in unknown can bus networks // Vehicular Communications. 2017. Vol. 9. P. 43-52.
- A first simulation of attacks in the automotive network communications protocol flexray / D.K. Nilsson [et al.] // Proceedings of the International Workshop on Computational Intelligence in Security for Information Systems CISIS’08. 2009. P. 84-91.
- Буш Р.Р. Стохастические модели обучаемости. М.: Физматгиз, 1962. 483 с.
- Кульбак С. Теория информации и статистика. М.: Наука, 1967. 408 с.
- Skatkov А., Bryukhovetskiy А., Moiseev D. Detecting changes simulation of the technological objects’ information states // MATEC Web of Conferences (ICMTMTE 2018). 2018. Vol. 224. P. 02072.
