Адаптивная система автоматического регулирования с подстройкой корректирующего устройства

Автор: Скороспешкин Максим Владимирович, Скороспешкин Владимир Николаевич
Журнал: Проблемы информатики @problem-info
Рубрика: Информационные технологии в системах автоматизации
Статья в выпуске: 5 (17), 2012 года.
Бесплатный доступ
Показана возможность создания цифровой адаптивной системы регулирования на базе цифрового оптимального регулятора и последовательного цифрового адаптивного корректора динамических характеристик с амплитудным ослаблением. Установлено, что применение таких систем позволяет существенно улучшить качество переходных процессов в системах автоматического регулирования нестационарными объектами. Сделан вывод о том, что такие системы целесообразно применять как при регулировании технологических параметров нестационарных объектов, так и при регулировании технологических параметров стационарных объектов, на которые поступают возмущения, приводящие к возникновению колебаний регулируемой величины с амплитудой, превышающей допустимую.
Адаптивная система регулирования, цифровой регулятор, корректор динамических характеристик систем автоматического регулирования с амплитудным ослаблением, качество регулирования, нестационарный объект регулирования
Короткий адрес: https://sciup.org/14320163
IDR: 14320163 | УДК: 511.4
Текст научной статьи Адаптивная система автоматического регулирования с подстройкой корректирующего устройства
Реализация современных систем автоматического регулирования (САР) проводится на базе промышленных микропроцессорных контроллеров, что позволяет осуществлять оптимальное и адаптивное регулирование.
Одной из основных проблем, решаемых при разработке адаптивных систем, является выбор способа адаптации и структуры системы. Используемый достаточно часто в составе адаптивной системы ПИД-регулятор не обеспечивает оптимального управления по критерию максимально-
Рис. 1. Структура САР с цифровым адаптивным регулятором:
АК - цифровой адаптивный корректор; ОР - оптимальный регулятор; ОУ - объект управления;
G - задающее воздействие; E - ошибка регулирования; E2 - выходной сигнал цифрового адаптивного корректора; U - управляющее воздействие; Y - выходная величина объекта управления го быстродействия, поэтому актуальной является разработка цифровых адаптивных оптимальных регуляторов.
К числу перспективных структур адаптивных систем относится структура, в состав которой входят псевдолинейное корректирующее устройство и ПИД-регулятор, а изменение свойств системы осуществляется путем изменения параметров корректирующего устройства. Преимуществом такой системы по сравнению с системой, в которой осуществляется подстройка параметров регулятора, является возможность изменения динамических свойств в существенно большем диапазоне. Например, применение псевдолинейного корректирующего устройства с фазовым опережением [1] позволяет корректировать фазовый сдвиг в диапазоне от 0 до 170°, причем в заданном диапазоне частот фазовый сдвиг будет постоянным.
В настоящей работе предлагается реализация адаптивной системы регулирования на базе цифрового оптимального регулятора [2], дополненного последовательным цифровым адаптивным корректором динамических характеристик с амплитудным ослаблением. Используемый корректор представляет собой псевдолинейное корректирующее устройство, осуществляющее изменение коэффициента передачи канала формирования управляющего воздействия при возникновении колебаний.
Структура предлагаемой системы представлена на рис. 1.
В качестве объектов управления были выбраны объекты второго порядка, как обладающие интегрирующими свойствами, так и не обладающие. Как показано в [2], для объекта управления с передаточной функцией вида
W ( р ) = pp + b )
оптимальный регулятор, обеспечивающий максимальное быстродействие и монотонный переходный процесс, имеет дискретную передаточную функцию где K0 = b [ah (1 - B)] ; b1 = — B, a1 = [1 - B (1 + bh)][bh (1 - B)] 1; B = e bh; h - такт управления.
Исследования САР с данным регулятором, проведенные в среде MatLab 6.5, показали его хорошую работоспособность лишь в небольшом диапазоне значений параметров объекта управления. Для обеспечения работоспособности САР объекта с переменными параметрами линей-
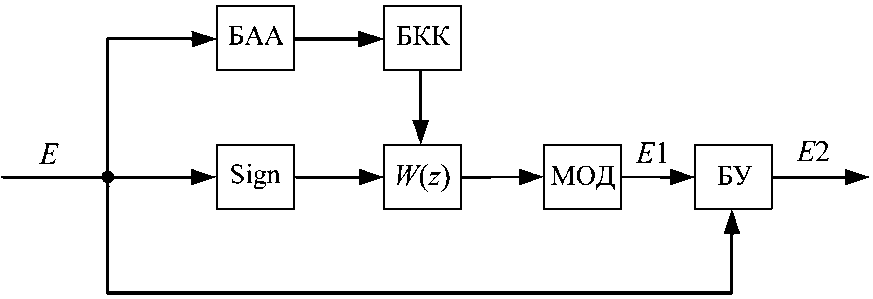
Рис. 2. Структурная схема адаптивного корректора:
Sign - блок определения знака; W ( z ) - дискретная передаточная функция динамического звена; МОД - блок выделения модуля; БУ - блок умножения; БАА - блок анализа амплитуды ошибки САР; БКК - блок коррекции коэффициента;
E - ошибка регулирования; E1 - выходной сигнал блока выделения модуля; E2 - выходной сигнал адаптивного корректора ный оптимальный регулятор дополнен псевдолинейным адаптивным корректором, совместно с которым реализуется нелинейный закон регулирования.
На рис. 2 представлена структурная схема адаптивного корректора.
Адаптивный корректор выполнен на базе фильтра, описанного в [3], однако этот фильтр помимо амплитудного ослабления (частотной адаптации), состоящего в подавлении высоких частот, дополнительно имеет свойство параметрической адаптации. Параметрическая адаптация осуществляется путем изменения статического коэффициента передачи линейного динамического звена с дискретной передаточной функцией
W (zA =___ K y ___= Y ( z )
W (z) 1-(1 -Y)z-1 X (z), где K<1 - коэффициент передачи; у - коэффициент, определяемый тактом управления и постоянной времени динамического звена.
Свойства данного фильтра при его аналоговой реализации соответствуют свойствам апериодического звена первого порядка с передаточной функцией
W ( Р ) = TKPX .
Параметр у определяется по формуле
Т
-
V= 1 0
-
Y T + T/
где T 0 - период дискретизации; Т - постоянная времени фильтра.
Данный корректор обеспечивает уменьшение амплитуды с ростом частоты без изменения фазы. Входной сигнал проходит по трем каналам. По нижнему каналу сигнал проходит без изменения, средний канал состоит из блока определения знака (блока сигнатуры), фильтра низких частот и блока выделения модуля. Верхний канал обеспечивает подстройку статического коэф-
P , кПа
1,0
0,5

Рис. 3. Реакция САР на ступенчатое задающее воздействие фициента передачи фильтра низких частот. Сигнал на выходе корректора равен произведению выходных сигналов нижнего и среднего каналов:
E 2 = EE 1 .
При возникновении в САР колебаний регулируемой величины в корректоре автоматически происходит уменьшение коэффициента передачи гармонического сигнала или амплитудное ослабление. Иными словами, происходит подавление колебаний регулируемой величины.
Ниже приведены результаты исследования САР с объектом управления, имеющим передаточную функцию
W ( p ) = —А .
p (p+1)
Такт управления h был принят равным 0,05 с.
С учетом принятого такта управления и в соответствии с формулами, полученными в [2], дискретной передаточной функцией оптимального регулятора для данного объекта управления является функция
„,. )= 1-0 , 951 z - 1
W ( z ) 1 + 0 , 496 z - 1 .
Оптимальный регулятор обеспечивает минимальное время переходного процесса без перерегулирования при ступенчатом задающем воздействии (рис. 3).
При изменении характеристик объекта управления данный оптимальный регулятор не обеспечивает монотонность переходного процесса. Для улучшения качества переходного процесса в САР вводится последовательный цифровой адаптивный корректор, осуществляющий изменение коэффициента передачи канала формирования управляющего воздействия при возникновении колебаний.
На рис. 4 представлены кривые, характеризующие реакцию на единичное ступенчатое воздействие САР объектом второго порядка с изменившимся статическим коэффициентом передачи, что характеризует изменение его свойств как нестационарного объекта. Передаточная функция данного объекта управления имеет вид
|
а 1 |
а |
||
|
। I 1 1 | I |
|||
|
...........\ .1........А.......1.......................i.......................\.......................1.......................i.......................i.......................i....................... |
|||
|
с 1 |
I v/ V v t i i ; |
||
|
/ у i i i i i i i |
|||
|
/...........I...............i...............r..............I..............i..............i............i................i.............. |
|||
|
= = = 1 1 : i i i i i i i i |
|||
|
2 4 6 8 r 10 12 14 16 18 t, 6 |
c |
||
|
i i 1 I ! । I I |
I |
- |
|
|
— |
|||
|
: ✓ : ; j • |
|||
|
i 1 i 1 i i i i |
|||
|
с |
2 4 6 8 10 12 14 16 18 t |
||
Рис. 4. Реакция САР на ступенчатое задающее воздействие: а - САР с оптимальным регулятором, б - САР с оптимальным регулятором и описанным выше корректором
W ( p ) = —.
p ( p + 1 )
Результаты исследования САР с корректором с амплитудным ослаблением, проведенного в среде MatLab 6.5, показали, что существенное улучшение качества переходных процессов в САР нестационарных объектов возможно путем изменения статического коэффициента передачи фильтра в зависимости от амплитуды колебаний ошибки. Для этого используется верхний канал. В блоке БАА определяется амплитуда колебаний ошибки. Если амплитуда превышает установленный порог, происходит уменьшение статического коэффициента передачи фильтра, до тех пор пока амплитуда не уменьшится и не станет меньше порогового значения. Уменьшение статического коэффициента передачи фильтра осуществляется блоком БКК. Данный блок реализован на базе динамического звена первого порядка и нелинейного звена типа насыщения.
На рис. 5 представлены кривые, характеризующие реакцию САР объекта второго порядка на ступенчатое задающее воздействие.
Исследования САР объектами управления с передаточными функциями
W ( Р ) = Г7ГТГ“ТМ - W ( Р ) = / а х2
(Р + а ) ( Р + b ) ( p + а )
также показали эффективность предлагаемого цифрового адаптивного регулятора.
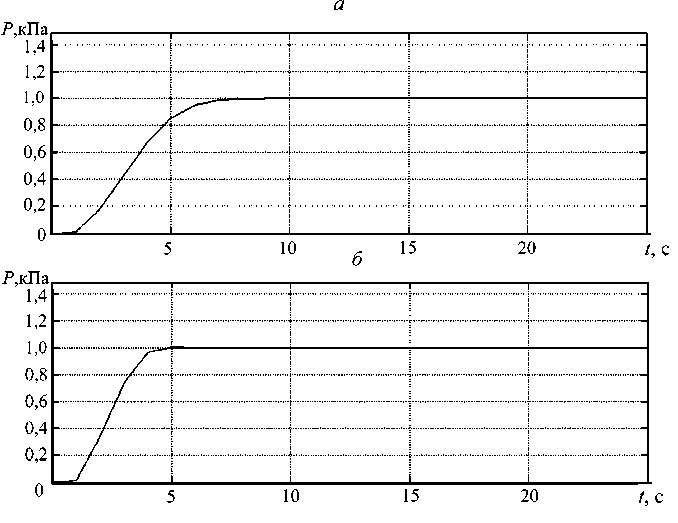
Рис. 5. Реакция САР на ступенчатое задающее воздействие:
а - САР с оптимальным регулятором и корректором без подстройки статического коэффициента передачи фильтра; б - САР с оптимальным регулятором и корректором с подстройкой статического коэффициента передачи фильтра
Результаты исследования САР с корректором, в котором происходит подстройка параметров по амплитуде ошибки, показали, что такие системы целесообразно применять при регулировании параметров как нестационарных объектов, так и объектов, на которые поступают возмущения, приводящие к возникновению в САР колебаний регулируемой величины с амплитудой, превышающей допустимую.
Список литературы Адаптивная система автоматического регулирования с подстройкой корректирующего устройства
- Пат. 104332 РФ, МПК G 05 B 5/01 (2006.01). Псевдолинейное корректирующее устройство с фазовым опережением/М. В. Скороспешкин, В. Н. Скороспешкин. № 2010149922/08; Заявл. 03.12.10; Опубл. 10.05.11, Бюл. № 13.
- Гостев В. И. Системы управления с цифровыми регуляторами: Справ. Киев: Техника, 1990.
- Методы автоматизированного проектирования нелинейных систем/Под ред. Ю. И. Топчеева. М.: Машиностроение, 1993.
