Адаптивная система синхронизации трехфазного мостового реверсивного тиристорного преобразователя

Автор: Цытович Леонид Игнатьевич, Качалов Андрей Валентинович, Дудкин Максим Михайлович, Рахматулин Раис Мухибович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Преобразовательная техника
Статья в выпуске: 15 (148), 2009 года.
Бесплатный доступ
Рассмотрен принцип построения адаптивного к нестабильности напряжения сети канала синхронизации тиристорного преобразователя. Приведены результаты его моделирования в пакете MatLab + Simulink и дана оценка характеристик адаптивного и традиционного принципов синхронизации.
Тиристорний преобразователь, системы управления, устройство синхронизации, адаптация
Короткий адрес: https://sciup.org/147158069
IDR: 147158069 | УДК: 62-83:681.51(075.8)
The decision of the task of structural identification of mathematical model of heating installation
The article considers the aufbau principle of thy ristor-based converter's synchronizing channel adaptive to line voltage instability. The results of its simulation the in Matlab + Simulink system are given, characteristics of adaptive and traditional principles of syncronisation are estimated.
Текст научной статьи Адаптивная система синхронизации трехфазного мостового реверсивного тиристорного преобразователя
Современные энергосистемы как стационарного, так и автономного базирования характеризуются высоким уровнем искажений с трудно предсказуемыми параметрами, зачастую выходящими за допустимые нормы искажений и играющими роль дестабилизирующих факторов в работе не только тиристорных преобразователей (ТП), но и технологических установок в целом. Поэтому создание систем управления ТП, способных адаптироваться к изменяющимся параметрам сети, является актуальной задачей, направленной на повышение надежности работы всего комплекса электротехнического оборудования промышленных предприятий.
В синхронных системах управления ТП (рис. 1) [1], характеризующихся наиболее высоким быстродействием, каждый из каналов систем импульсно-фазового управления (СИФУ) синхронизирован с соответствующей фазой А, В, С напряжения сети через устройства синхронизации УС-А, УС-В, УС-С, которые формируют сигналы логической «1» на интервале времени, где соответствующий тиристор блока силовых вентилей (БСВ) может быть переведен в открытое состояние.
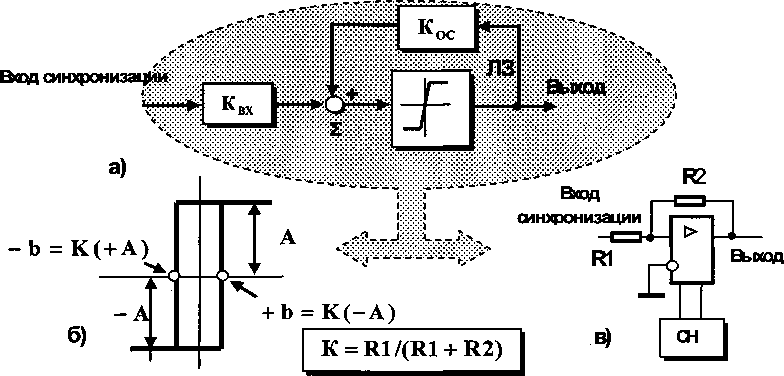
Для этих целей зачастую используются схемы регенеративных компараторов (рис. 2, а) [2] на основе линейного звена ЛЗ с высоким значением собственного коэффициента усиления и резистивными звеньями К^Х,КОС на вх°Де и в цепи положительной обратной связи. Ширина петли гистерезиса УС (рис. 2, б) определяется соотношением резисторов RI, R2 (рис. 2, в) и амплитудой ±Л выходных импульсов (ЛЗ) (напряжением источника электропитания, в качестве которого традиционно используется стабилизатор напряжения (СП).
Сеть
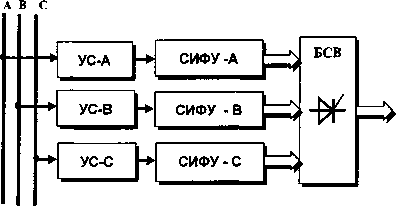
Рис. 1. Функциональная схема синхронной системы управления ТП
г)
Рис. 2. Обобщенная структурная схема (а), характеристика «вход-выход» (б), пример технической реализации (в) и график погрешности (г) компараторного устройства синхронизациис независимым уровнем фиксации
Ширина петли гистерезиса УС ±6 (см. рис. 2, б) настраивается таким образом, чтобы передний и задний фронты импульса синхронизации совпадали с точками естественной коммутации, в пределах которых разрешается работа соответствующих вентилей БСВ (см. рис. 1).
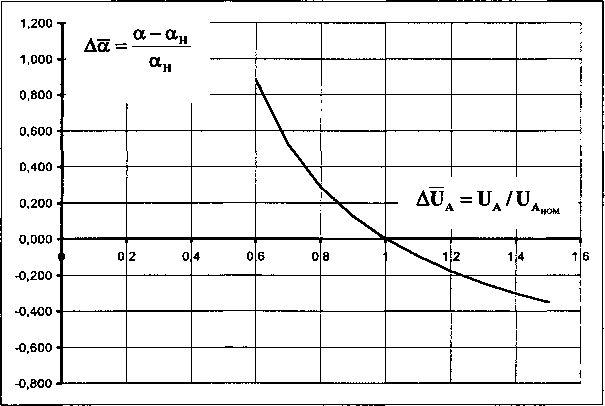
На рис. 2, г приведен график зависимости Аа = f^kU^, полученный в результате моделирования процессов в синхронном реверсивном мостовом тиристорном преобразователе (см. рис. 1) в среде MatLab + Simulink при нестабильности напряжения сети. Здесь: Act = (а-ан)/ан - нормированная ошибка угла синхронизации а при его начальном заданном значении ая =30эл. град; NUA = ^л/^ном "" относительная нестабильность амплитуды UА напряжения сети при ее номинальном значении .
Для этих целей зачастую используются схемы регенеративных компараторов (рис. 2, а) [2] на основе линейного звена ЛЗ с высоким значением собственного коэффициента усиления и резистивными звеньями 7^вх, К^ на входе и в цепи положительной обратной связи. Ширина петли гистерезиса УС (см. рис. 2, б) определяется соотношением резисторов 7^1, R2 (см. рис. 2, в) и амплитудой ±Л выходных импульсов ЛЗ (напряжением источника электропитания, в качестве которого традиционно используется стабилизатор напряжения СН).
Полученные результаты свидетельствуют о том, что применение компараторных УС с постоянным уровнем фиксации синхронизирующего сигнала затруднительно в энергосистемах с неста- ционарной амплитудой напряжения сети. Так, при отклонениях напряжения фазы А (рис. 2, г) в пределах ±10 % ошибка Да начального угла синхронизации также будет находиться в области ±10 %, что приведет к значительным искажениям характеристик ТП.
Частично проблемы ТП, связанные с нестабильностью амплитуды сети, могут быть решены путем использования адаптивного компараторного УС (рис. 3, а) [3], которое отличается от традиционной схемы (см. рис. 2, а) наличием демодулятора ДМ /7-фазной системы синхронизирующих сигналов Хсх,ХС1..Ха, амплитудного модулятора
АМ и сглаживающего фильтра Ф, например первого порядка.
Наличие последнего в структуре УС необходимо только в случае л=1. В результате характеристика «вход-выход» УС (рис. 3, б) оказывается нестационарной во времени и изменяется в зависимости от параметров системы синхронизирующих воздействий. На практике подобная структура УС может быть реализована, например, на операционном усилителе с питанием от нестабилизированного выпрямленного напряжения с выхода трехфазного «нулевого» выпрямителя (рис. 3, в). Рассмотрим подробнее режимы работы подобного устройства.
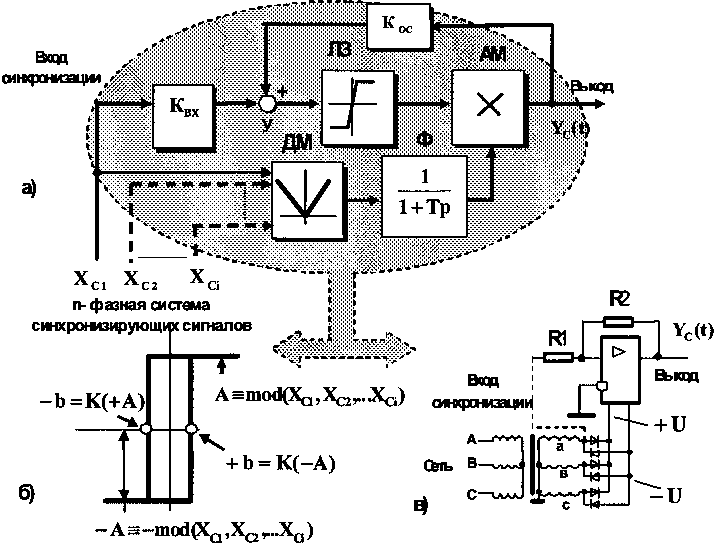
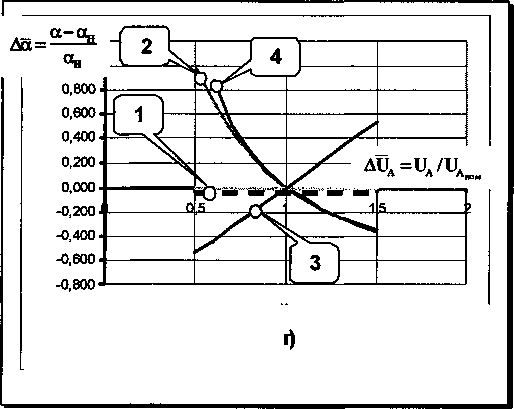
Рис. 3. Обобщенная структурная схема (а), характеристика «вход-выход» (б), пример технической реализации (в) и графики погрешности (г) адаптивного устройства синхронизации с зависимым уровнем фиксации синхронизирующего воздействия
В результате демодуляции трехфазной системы напряжений а, Ь, с формируются напряжения постоянного знака +(/ и -U (рис. 4, а), которые определяют закон изменения вершины импульсов на выходе компаратора и, следовательно, характер его порогов переключения. При этом +17 формирует порог фиксации -Ь^, а напряжение -U- пороговый уровень +б(^) (рис. 4, б). Во времени каждый из пороговых уровней ±б(^) включает в себя периодическую пульсирующую составляющую фаз а, Ь, с (рис. 4, б). Путем соответствующего подбора амплитуды, например фазы а обеспечивается переключение УС в точках 1 и 2 (рис. 4, а, б, моменты времени tx и /2 соответственно).
В результате на выходе УС формируется импульсный сигнал Yc (t) (рис. 4, в, г) с пульсирую щей амплитудой. При синхронном изменении амплитуды фаз напряжения сети (например, увеличении на АЛ, рис. 4, б) происходит пропорциональный рост порогов фиксации ±Ь^ до уровня ±6(^)±А6. В результате точки фиксации 1 и 2 перемещаются вертикально в положения 1-1 и 2-2 соответственно (рис. 4, б), однако моменты времени tx и Г2 переключения УС сохраняются неизменными. При этом ошибка синхронизации полностью отсутствует как при увеличении, так и при уменьшении амплитуд фаз напряжения сети (см. рис. 3, г, зависимость 1).
При этом схема системы синхронизации ТП (рис. 5) отличается от традиционной (см. рис. 1) тем, что в формировании сигнала синхронизации по каждому из каналов принимают участие две фазы напряжения сети. Так для канала фазы А синхронизирующим воздействием является
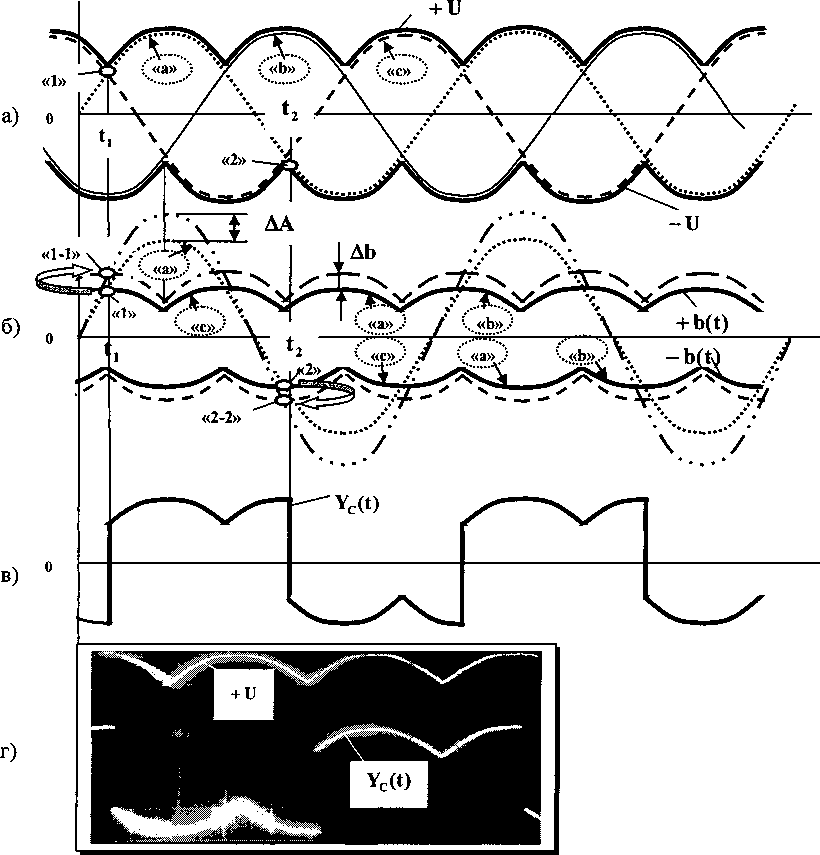
Рис. 4. Временные диаграммы сигналов (а, б, в) и осциллограмма (г) адаптивного устройства синхронизации при симметричной нестабильности фазных напряжений
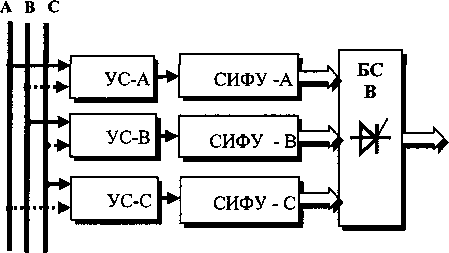
Рис. 5. Функциональная схема адаптивной синхронной системы управления ТП непосредственно фаза А, а уровень фиксации определяется фазой В. Для канала фазы В уровень фиксации зависит от состояния фазы С, а в канале управления фазы С пороговый уровень диктуется фазой А.
Подобное положение отрицательно сказывается при работе ТП в случае асимметричного изменения амплитуд напряжений фаз сети.
Предположим, что на величину М умень шилась амплитуда фазы b (рис. 6 а). Это влечет за собой смещение уровня фиксации компаратора для сигнала синхронизации фазы а (рис. 6 б), в результате чего точки 1 и 2 перемещаются в положения 1-1 и 2-2 соответственно как по горизонтальной, так по вертикальной осям. При этом появляется ошибка синхронизации Аа в фазе, амплитудное значение которой соответствует номинальному уровню. Аналогичная ошибка, только с противоположным знаком, будет и в случае, когда на величину АЛ изменилась амплитуда фазы и, а фаза b осталась неизменной (рис. 6 в).
На рис. 3 г приведены результаты моделирования ТП при асимметрии фазных напряжений (зависимости 2, 3), когда только фаза а имеет нестабильную амплитуду.
В этом случае погрешность синхронизации в канале управления фазы а изменяется по кривой 2, а в фазе с соответствует зависимости 3 (кривая 4 соответствует схеме УС на рис. 2 а). Одновременно с этим для фазы b Аос = 0, так как работа ее канала синхронизации зависит от фаз b и с, которые в данном случае имеют номинальное значе-
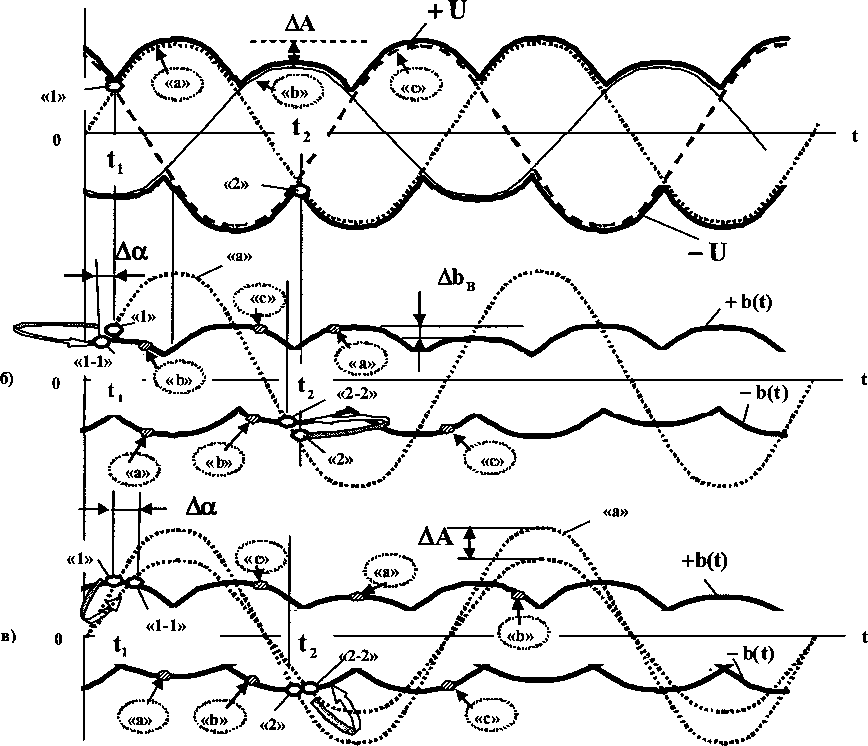
Рис. 6. Временные диаграммы сигналов адаптивного устройства синхронизации при нестабильности амплитуды фазы b и а
ние. Обращает на себя внимание тот фактор, что Да для а и с (рис. 3, г, кривые 2, 3) изменяется в противоположных по знаку направлениях, что при определенных схемотехнических решениях в СИФУ и режимах работы ТП может вызвать эффект взаимной компенсации этих ошибок.
В любом случае рассмотренную адаптивную систему синхронизации ТП целесообразно рекомендовать к применению на объектах, где подавляющая доля результирующей нагрузки приходится на трехфазные потребители, когда наблюдается симметричная нестабильность по всем фазам одновременно.
Список литературы Адаптивная система синхронизации трехфазного мостового реверсивного тиристорного преобразователя
- Управление вентильными электроприводами постоянного тока/Е.Д. Лебедев, В.Е.Неймарк, М.Я. Пистрак, О.В. Слежановский -М.: Энергия, 1970.
- Воловин, Г. И. Схемотехника аналоговых и аналогово-цифровых электронных устройств/Г.И Воловин. -М.: ИД «Додэка-ХХ1», 2005.
- A.c. 1731014 СССР, Н02М7/155. Система импульсно-фазового управления/Л.И. Цытовин, В.Г.Маурер, P.M. Рахматулин. -№4804663/07; заявлено 20.03.90; опубл. 15.04.92, Бюл. № 12.
