Адаптивное интегрирующее устройство синхронизации для систем управления силовыми вентильными преобразователями

Автор: Дудкин Максим Михайлович, Усынин Юрий Семенович, Осинцев Константин Владимирович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Преобразовательная техника
Статья в выпуске: 4 т.18, 2018 года.
Бесплатный доступ
Предложен новый принцип построения устройства синхронизации (УС) на основе интегрирующего развертывающего преобразования для ведомых сетью силовых вентильных преобразователей (ВП). УС представляет собой нелинейную импульсную систему, в основе которой лежит замкнутая структура интегрирующего развертывающего преобразователя (РП), работающего в режиме внешней синхронизации с частотой напряжения сети. Приведены структурная схема, временные диаграммы сигналов и условия внешней синхронизации РП гармоническим и прямоугольным биполярным сигналами. Получены рекомендации по выбору соотношения частоты собственных автоколебаний развертывающего преобразователя и частоты напряжения сети. Показано, что адаптивное интегрирующее устройство синхронизации полностью адаптируется к нестабильности амплитуды и частоты напряжения сети в пределах ±50 % и выше. В отличие от известных схем синхронизации предложенное УС представляет собой адаптивный фильтр первого порядка, полоса пропускания которого автоматически перестраивается в зависимости от амплитуды и частоты напряжения сети. Это свойство интегрирующего УС позволяет подавлять высшие гармоники в питающей сети при нестабильности частоты в пределах ±50 % и выше. Также показана высокая помехоустойчивость предложенного адаптивного интегрирующего УС по отношению к коммутационным искажениям напряжения сети. Все это говорит о целесообразности его применения в системах управления ВП, питание которых осуществляется от автономной системы электроснабжения «малой» мощности, например, дизель- или ветрогенераторных установок. Даны рекомендации по выбору параметров адаптивного интегрирующего УС. На примере трёхфазного реверсивного тиристорного выпрямителя постоянного тока рассмотрена функциональная схема перекрестной синхронизации, а также приведены результаты ее практического применения в составе систем управления силовыми ВП.
Устройство синхронизации, интегрирующий развертывающий преобразователь, система управления, вентильный преобразователь
Короткий адрес: https://sciup.org/147232710
IDR: 147232710 | УДК: 62-83 | DOI: 10.14529/power180408
Adaptive integrating synchronizing unit for power semiconductor converters control systems
The article proposes a new principle for developing a synchronizing unit (SU) based on integrating scan conversion for circuit driven power semiconductor converters (SC). The SU is a nonlinear pulse system based on the closed structure of an integrating scanning converter (ISC) operating in the mode of external synchronization with circuit voltage frequency. The block diagrams, the waveform diagram and external synchronization conditions for ISC by harmonic and bipolar rectangle signals are provided. The selection recommendations on the frequency ratio of self-oscillations of the scanning converter and circuit voltage frequency were tested. The paper shows that the adaptive integrating synchronizing unit fully adapts to amplitude instability and circuit voltage frequency within the range of ±50 % and higher. Unlike the existing synchronizing circuits, the proposed SU is a first-order adaptive filter, whose bandwidth is automatically tuned to the amplitude and frequency of circuit voltage. This property of the integrating SU allows suppressing higher harmonics in the supply circuit with frequency instability within the range of ±50 % and higher. The adaptive integrating SU’s high noise immunity to commutation distortions of circuit voltage is also shown. These results illustrate the practicability of using it in SC control systems, which receive power from an independent low-power supply system, for example, diesel or wind power generating plants. The paper also provides the recommendations on choosing the parameters of the adaptive integrating SU. A three-phase reverse thyristor rectifier is used as an example of a crossed synchronization flow-chart as well as the results of its practical application as a part of power SC control systems are provided.
Текст научной статьи Адаптивное интегрирующее устройство синхронизации для систем управления силовыми вентильными преобразователями
Современные системы электроснабжения как стационарного, так и автономного базирования характеризуются высоким уровнем искажений с труднопрогнозируемыми параметрами, которые зачастую выходят за допустимые нормы и приводят к сбоям в работе не только силовых вентильных преобразователей, но и технологических установок в целом [1–3]. Поэтому разработка систем управления ВП, способных полностью адаптироваться к изменяющимся параметрам сети (амплитуда, частота, высшие гармоники, коммутационные и импульсные искажения) в сочетании с высокой помехоустойчивостью, является актуальной задачей, направленной на повышение эксплуатационной надежности работы всего комплекса электротехнического оборудования промышленных предприятий. Причем создание таких систем актуально не только применительно к новым разработкам в области ВП, но и к действующему оборудованию, подлежащему реконструкции.
Наиболее ответственным элементом любой системы управления ВП является устройство син- хронизации, так как от его работы зависит точность синхронизации системы управления с питающей сетью. В большинстве случаев УС находится вне замкнутого контура регулирования системы управления ВП, и поэтому любой дестабилизирующий фактор со стороны напряжения сети приводит к отклонению ее выходных характеристик. Если питающая сеть «большой» мощности (минимальные искажения и стабильные параметры сети), то получить устойчивый неискаженный сигнал синхронизации обычно можно без всяких проблем. Однако в случае сети «малой» мощности получение неискаженного сигнала синхронизации является достаточно сложной задачей, так как он должен точно совпадать по фазе с первой гармоникой напряжения сети.
Первые устройства синхронизации строились по разомкнутому принципу и представляли собой последовательное включение, например, апериодического фильтра первого порядка и релейного элемента с симметричными относительно нулевого уровня порогами переключения [4]. Главным недостатком подобных УС является то, что в них заданный угол синхронизации существенно меняется при отклонении амплитуды и частоты напряжения сети [5], что неизбежно приводит к аварийным ситуациям и сбоям в работе не только силовых ВП, но и технологического оборудования в целом.
Применение полосовых фильтров [6], которые выделяют полезную составляющую частоты напряжения сети без фазового сдвига, может быть полезно при работе ВП на сеть «малой» мощности. Однако основным недостатком этих схем является генерирование ими неканонических гармоник, вызывающих проблемы гармонической неустойчивости. Поэтому от применения полосовых фильтров в системах управления ВП пришлось отказаться.
Развитие схемотехники синхронизирующих устройств в сочетании с вышеуказанными недостатками способствовали разработке замкнутых синхронизирующих устройств, построенных по принципу фазовой автоподстройки частоты [7–9].
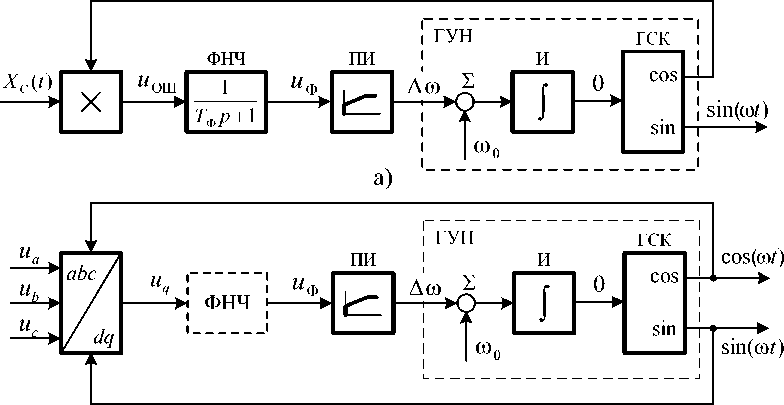
Простейшая система ФАПЧ состоит из блока выделения ошибки на основе умножителя, фильтра низких частот (ФНЧ), пропорционально-интегрального регулятора (ПИ) и генератора, управляемого напряжением (ГУН) (рис. 1а) [7]. В этой системе ФАПЧ сигнал ошибки uOШ по фазе и частоте формируется как результат умножения синхронизирующего напряжения ХС(t) = 1 ⋅sin(ω1t + θ1) и сигнала обратной связи 1 ⋅ cos(ω2t + θ2) и равен uОШ = 0,5⋅sin[(ω1 -ω2)⋅t+(θ1 -θ2)]+
+ 0,5 ⋅ sin [ (ω 1 +ω 2 ) ⋅ t + ( θ 1 + θ 2 ) ] . (1)
В установившемся режиме синхронизирующее напряжение ХС(t) равно сигналу обратной связи. При этом ω1 = ω2 и θ1 = θ2, поэтому первый член в выражении (1) равен нулю. Второй член в установившемся режиме представляет нежелательную составляющую с частотой 2 ω. Чтобы выделить сигнал ошибки постоянного напряжения uФ и убрать нежелательную переменную составляющую, используется низкочастотный фильтр НЧФ с передаточной функцией W(p) = 1/(ТФp+1). Выходной сигнал с ПИ-регулятора Δω совместно с начальной частотой ω0 используется для модулирования частоты и фазы угла поворота θ, а также формирования sin(ωt) и cos(ωt) на выходе генератора синусоидальных колебаний (ГСК).
Недостаток обычной системы ФАПЧ заключается в том, что она не обеспечивает точной синхронизации с синхронизирующим сигналом Х С( t ) при изменении его частоты в широком частотном диапазоне, например, при отклонениях частоты от установившегося значения в пределах ± 50 % и выше. Это объясняется тем, что частота среза ФНЧ и параметры ПИ-регулятора имеют фиксированные значения и настраиваются на начальную частоту ω 0.
Последний недостаток полностью исключается в системе ФАПЧ, построенной на основе p-q теории (рис. 1б) [8, 9]. В основу функционирования данной системы положено известное свойство преобразования Парка – Горева [10], где осуществляется переход от трехфазной системы координат abc к прямоугольной синхронной dq . Таким образом, на выходе блока преобразования координат формируется сигнал ошибки u OШ = u q , соответствующий разности частот и фаз между напряжением питающей сети и сигналами обратной связи sin( ω t ) и cos( ω t ). В остальном схема ФАПЧ (рис. 1б) по составу блоков и принципу работы полностью совпадает с обычным ФАПЧ (рис. 1а).
Основное отличие обычного ФАПЧ от ФАПЧ, построенного на основе p-q теории, заключается
б)
Рис. 1. Структурные схемы ФАПЧ: обычная (а); на основе p-q теории (б)
в том, что при нормальных условиях эксплуатации в сигнале ошибки u OШ обычного ФАПЧ имеется большая 2-я гармоника и в замкнутом контуре нужно предусмотреть установку ФНЧ. В то же время в сигнале ошибки uq ФАПЧ (рис. 1б) такая составляющая переменного напряжения отсутствует, поэтому ФНЧ можно не устанавливать.
Однако если напряжение на шинах питающей сети содержит высшие гармоники, например третью, то сигнал ошибки u q будет содержать 2-ю гармонику напряжения. Для ее подавления в систему ФАПЧ, построенной на основе p-q теории, необходимо будет ввести ФНЧ (рис. 1б). Тогда в случае нестабильности частоты питающей сети в широком частотном диапазоне ( ± 50 % и выше) потребуется производить перенастройку ФНЧ и ПИ-регулятора для достижения высокой точности синхронизации ФАПЧ и его устойчивости замкнутого контура.
Вышеуказанная проблема полностью решается в адаптивном интегрирующем УС, построенном на основе интегрирующего развертывающего преобразования [11].
Актуальность статьи заключается в том, что в ней предложен новый принцип построения синхронизирующего устройства на основе интегрирующего развертывающего преобразования, отличающийся от известных структур ФАПЧ способностью подавлять высшие гармоники в питающей сети при нестабильности частоты в пределах ± 50 % и выше.
Как показали многочисленные исследования, проведенные авторами статьи, применение методов интегрирующего развертывающего преобразования для построения не только синхронизирующих устройств, но и систем управления ВП в целом является одним из эффективных способов повышения их помехоустойчивости, статической и динамической точности [12–17].
Ниже рассматривается адаптивное интегрирующее УС [11], сочетающее в себе высокую помехоустойчивость к искажениям сети (высшие гармоники и коммутационные провалы) и способность адаптироваться к колебаниям амплитуды и частоты питающего напряжения в широком диапазоне.
Статические и динамические характеристики адаптивного интегрирующего устройства синхронизации
В основе адаптивного УС лежит замкнутая структура интегрирующего развертывающего преобразователя с частотно-широтно-импульсной модуляцией (ЧШИМ) [13, 16], которая включает в себя сумматоры 2 1- 2 2, интегратор И и релейный элемент РЭ с симметричной относительно «нуля» петлей гистерезиса (рис. 2а). Отличительной особенностью данной структуры является то, что она работает в режиме внешней синхронизации с частотой напряжения сети [18, 19].
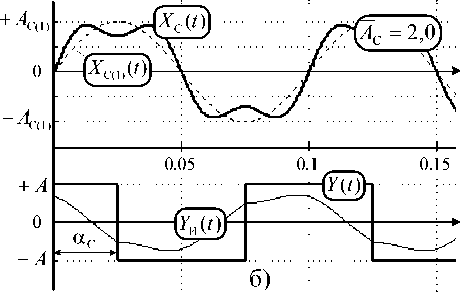
Для перевода РП из режима ЧШИМ в режим вынужденных переключений, когда в системе реализуется широтно-импульсная модуляция, необходимо на вход РП подать синхронизирующий сигнал Х С( t ) (напряжение сети), имеющий форму синусоиды (рис. 2б) либо прямоугольных биполярных импульсов со средним нулевым значением. В результате этого на выходе РП устанавливаются знакопеременные импульсы Y ( t ) с частотой напряжения сети ( Т С )–1 = ( Т 0 )–1, которые сдвинуты относительно сигнала Х С ( t ) на угол синхронизации а С (рис. 2б, в). Выходной сигнал интегратора Y И( t ) близок по форме к гармоническому сигналу Х С ( t ). Переключение релейного элемента осуществляется при достижении разверткой интегратора Y И ( t ) порогов переключения ± Ь РЭ (рис. 2в).
В работе [18] получены условия синхронизации РП прямоугольным биполярным и гармоническим сигналами соответственно:
А с > Т 0 — 1, (2)
А с > 0,5 л- Т о - 1|. (3) Здесь А с = | А С / А — нормированная амплитуда А С сигнала синхронизации (кратность синхронизации); Т о = Т о / Т с - нормированное значение периода собственных автоколебаний Т 0 = 4 ЬТ И РП, когда А С = 0, по отношению к периоду Т С синхронизирующего сигнала Х С( t ); Ь = b / А\ - нормированное значение порогов переключения РЭ; ± А - амплитуда выходных импульсов РЭ; Т И – постоянная времени интегратора РП.
На основе полученных неравенств (2), (3) можно сделать важный вывод о том, что при Т о = 1,0 уровень А с стремится к нулю, поэтому частоту собственных автоколебаний ( Т 0)–1 в РП целесообразно выбирать равной частоте ( Т С )–1 синхронизирующего воздействия Х С( t ).
Фазовый сдвиг а С между синхронизирующим воздействием Х С ( t ) и выходными импульсами Y ( t ) (рис. 2б, в) зависит от нормированного значения периода Т 0 = Т 0 / Т С собственных автоколебаний и глубины синхронизации АС :
а С = - 90 эл. град -
1 +
Т — 1

Из выражения (4) видно, что при Т0 = 1,0, когда частота собственных автоколебаний (Т0)-1 = = 1/4ЬТИ РП равна частоте (ТС)-1 сигнала синхро- низации ХС(t), и любых значениях АС угол син- хронизации аС всегда остается постоянным и равным –90 эл. град. Это придает интегрирующему УС свойство адаптации к нестабильности амплитуды напряжения сети в диапазоне ±50 % и выше, что подтверждает пространство статического

Рис. 2. Структурная схема адаптивного интегрирующего устройства синхронизации (а) и его временные диаграммы сигналов (б–д)
0.5 0.4 0.3 0.2 0.1 0 -0.1 -0.2 -0.3 -0.4 -0.5

Δ f C
а)
б)
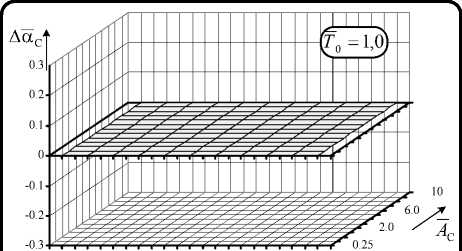
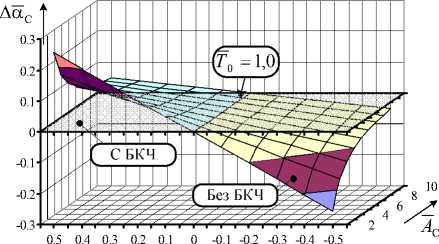
Рис. 3. Пространства статического состояния ДаС = f (ДАС, AC) (а) и ДаС = f (ДfС, AC) (б) адаптивного интегрирующего устройства синхронизации для режима внешней синхронизации гармоническим сигналом состояния ΔαС = f (ΔAС, АC) (рис. 3а), полученное в программе MATLAB + Simulink на основе компьютерного моделирования УС, при изменении глубины синхронизации в диапазоне 0,25 ≤ АС ≤ 10,0 . Здесь ΔαС = ( α*С αС ) - 1 – нормированная ошибка *
угла синхронизации α С по отношению к начальному углу α С = –90 эл. град; Δ A С = ( А С А С.НОМ ) - 1 ,
Δ f С = ( f С f С.НОМ ) - 1 – нормированные ошибки амплитуды А С и частоты f С напряжения сети Х С( t ) по отношению к их номинальным значениям А С.НОМ и f С.НОМ соответственно.
При изменениях частоты ΔfС и кратности сигнала синхронизации AС пространство ΔαС = = f (ΔfС , АC ) приобретает существенно нелиней- ный характер (рис. 3б). Так, например, с ростом АfС ошибка АаС возрастает, так как нарушается условие равенства между собственной частотой автоколебаний РП (Т0)–1 и частотой напряжения сети (ТС)–1 и согласно (4) появляется отклонение угла синхронизации аС от заданного значения, равного –90 эл. град, что следует отнести к числу недостатков интегрирующего УС.
Для устранения последнего недостатка в схему адаптивного интегрирующего УС введен блок коррекции частоты БКЧ (рис. 2а), в состав которого входит амплитудный модулятор АМ, сумматор Е 3, источник напряжения X 0 , преобразователь периода (интервала времени) в напряжение ППН и генератор коротких импульсов ГКИ, запускаемый по переднему и заднему фронтам импульса с выхода РП (рис. 2г).
При номинальной частоте напряжения сети сигнал на выходе ППН YТ ( t ) равен по модулю порогу переключения b релейного элемента (рис. 2г), поэтому Y А( t ) на выходе АМ равен нулю (рис. 2 д).
При отклонении частоты напряжения сети ХС(t) от номинального значения (рис. 2б) сигнал Y^t) на выходе ППН возрастает до уровня (b + Аb) (рис. 2 г). На выходе АМ формируется знакопеременный сигнал YА(t) с амплитудой Аb и периодом Т0 выходных импульсов РЭ (рис. 2в, д). Это приводит к изменению порога переключения b релейного элемента на величину |Аb (рис. 2в) при сохранении равенства Тс = Т0 = 4ЬТИ . В результате в установившемся режиме работы угол синхронизации аС между напряжением сети ХС(t) и выходными импульсами РП сохраняется равным –90 эл. град (рис. 2б, в). Поэтому ошибка угла синхронизации АаС равна нулю, что подтверждает пространство статического состояния (рис. 3б). При этом за счет введения в схему синхронизи- рующего устройства блока коррекции частоты диапазон отклонения частоты напряжения сети существенно расширяется до значений от –0,9 до 3,0 (или в абсолютных единицах от 5 до 200 Гц при номинальной частоте напряжения сети fС.НОМ = = 50 Гц) при уровнях сигнала синхронизации 0,25 < АС < 10,0.
Для определения степени зависимости динамических характеристик РП от параметров синхронизирующего сигнала Х С( t ) в программе MATLAB + Simulink были сняты логарифмические амплитудно-частотные характеристики (ЛАЧХ) k = f ( F ) адаптивного интегрирующего УС при его синхронизации как прямоугольным, так и гармоническим сигналами при различных значениях глубины синхронизации А С (рис. 4). С этой целью на вход РП кроме синхронизирующего воздействия Х С( t ) подавался переменный гармонический сигнал Х П( t ) = А П • sin(2 n f П t ) с постоянной амплитудой АП = | А П / А | = 0,1 и частотой f n .
На рис. 4 приняты следующие обозначения: k = Y 0 m / A П — коэффициент передачи РП; F = f П / f с - нормированная частота гармонического сигнала Х П( t ) по отношению к частоте f С синхронизирующего воздействия Х С( t ).
Анализ характеристик (рис. 4) позволяет сделать следующие основные выводы:
-
- адаптивное интегрирующее УС по динамическим свойствам близко к апериодическому звену первого порядка W(р ) = ^( Т Э p + 1) с эквивалентной постоянной времени
Т э ^ 0,25 • А с • Т с (5) для синхронизации прямоугольными импульсами и
Т э - ( л- А с • Т с )16 (6) для синхронизации гармоническим сигналом.

Рис. 4. Логарифмические амплитудно-частотные характеристики адаптивного интегрирующего УС при различных значениях глубины синхронизации
Выражения (5), (6) справедливы только в области частот достоверной передачи, границей раздела которой является известное равенство F = f П / f С ≤ 0,5 теоремы В.А. Котельникова. Выше этой частоты развертывающий преобразователь, как и любая другая импульсная система, переходит в режим замедленной дискретизации динамической составляющей входного сигнала [13, 20];
-
- интегрирующее УС является адаптивным фильтром, параметры которого автоматически перестраиваются в зависимости от амплитуды А С и частоты ( Т С )–1 сигнала синхронизации (напряжения сети). В результате этого интегрирующее УС синхронизируется с напряжением сети с высокой точностью (ошибка угла синхронизации Δ α С стремится к нулю) даже при наличии высших гармоник в питающем напряжении и нестабильности частоты синхронизирующего сигнала в пределах ± 50 % и выше. Это подтверждают результаты моделирования адаптивного интегрирующего УС при наличии в синхронизирующем сигнале Х С( t ) наиболее низкочастотной третьей гармоники напряжения с амплитудой А С(3) = А С(3) / А С(1) , равной 30 % от амплитуды основной составляющей напряжения сети А С(1) , при двух значениях частоты
питающего напряжения f C = 50 Гц (рис. 5а) и f C = 10 Гц (рис. 5б).
Из рис. 5 видно, что третья гармоника полностью подавляется адаптивным интегрирующим УС, а угол синхронизации α С равен –90 эл. град. Здесь следует напомнить, что при прочих равных условиях в известных системах ФАПЧ (рис. 1) обязательно возникает ошибка синхронизации по причине фиксированных значений полосы пропускания фильтра низких частот и параметров ПИ-регулятора, которые настраиваются на номинальную частоту синхронизирующего напряжения;
-
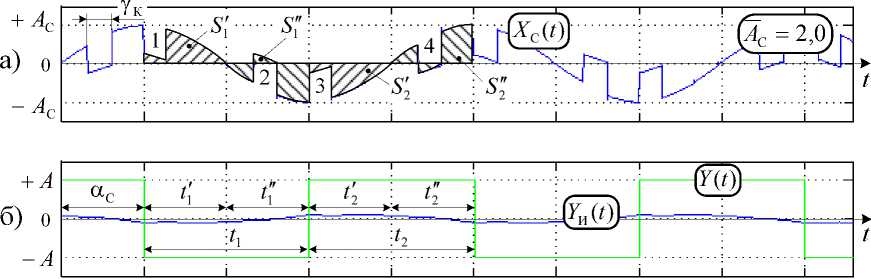
- представление адаптивного интегрирующего УС в виде апериодического фильтра первого порядка указывает и на его высокую помехоустойчивость к коммутационным и импульсным искажениям напряжения сети. Это подтверждают результаты моделирования интегрирующего УС при наличии коммутационных провалов в напряжении сети, достигающих уровня γК = 25 эл. град. (рис. 6а). Провалы создавались трехфазным мостовым тиристорным выпрямителем тока при его работе на сеть «малой» мощности. При этом ошибка угла синхронизации Δ α С = 0 ( α С = –90 эл. град), так как на интервалах времени t 1 и t 2 коммутационные провалы «1» и «2», «3» и «4» взаимно
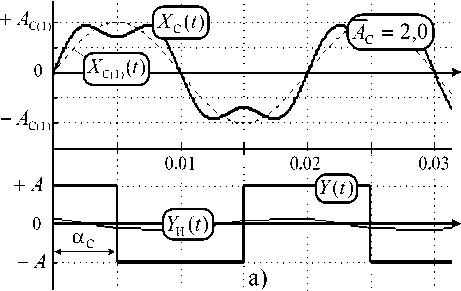
Рис. 5. Временные диаграммы адаптивного интегрирующего УС при наличии третьей гармоники в синхронизирующем сигнале и изменении частоты питающего напряжения: f C = 50 Гц (а) и f C = 10 Гц (б)
0.02 0.04 0.06 0.08
Рис. 6. Временные диаграммы адаптивного интегрирующего УС при коммутационных провалах напряжения сети ( γ К = 25 эл. град)
компенсируют друг друга или площади S 1 ′ , S 1 ′′ и S 2 ′ , S 2 ′′ на подинтервалах t 1 ′ , t 1 ′′ и t 2 ′ , t 2 ′′ равны между собой (рис. 6б).
Теоретически и экспериментально установлено, что оптимальным уровнем сигнала синхронизации А С следует считать диапазон π/2 ≤ А С ≤ 4,0, когда разрешается компромисс между быстродействием и помехоустойчивостью.
Все вышесказанное говорит о целесообразности применения адаптивного интегрирующего УС в системах управления ведомых ВП, питание которых осуществляется от автономной системы электроснабжения «малой» мощности с высоким уровнем искажений (высшие гармоники и коммутационные провалы) и нестабильными параметрами напряжения сети.
Практическая часть
Наличие фазового сдвига αС, равного –90 эл. град, между сигналом синхронизации ХС(t) и выходными импульсами Y(t) (рис. 2б, в) в адаптивном интегрирующем УС (рис. 2а) требует нестандартного построения контура синхронизации системы управления (СУ) ВП. Одним из вариантов такого построения, например для трехфазных тиристорных выпрямителей с многоканальной синхронной системой управления, является метод перекрестной синхронизации каналов СУ (рис. 7а).
Здесь синхроимпульс на выходе УС-А с длительностью 180 эл. град опережает фазу А на 90 эл. град (рис. 7б). При этом передний фронт данного импульса совпадает с точкой естественной коммутации фазы С . В результате синхронизацию канала управления фазы С можно произвести синхроимпульсами с выхода УС-А. Аналогичным образом происходит синхронизация в других каналах управления ВП (рис. 7а).
С целью получения синхроимпульсов, совпадающих с моментами перехода фазных напряжений сети через ноль, УС-А, УС-В, УС-С следует синхронизировать от линейных напряжений АВ , ВС , СА , опережающих фазные А , В , С на 30 эл. град.
Адаптивное интегрирующее УС (рис. 2а) может быть также использовано в системах управления активных выпрямителей напряжения (тока), активных силовых фильтров, матричных преобразователях частоты и других ВП. Более подробно данные технические решения рассмотрены в статье [21].
На рис. 8 показана осциллограмма сетевого
А В С
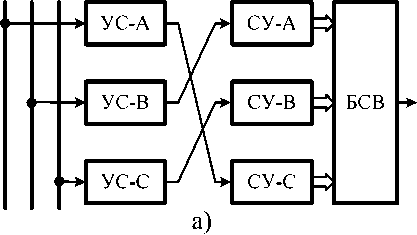
Рис. 7. Структурная схема (а) и временные диаграммы сигналов (б) перекрестной схемы синхронизации ВП (УС-А, УС-В, УС-С – устройства синхронизации каналов фаз А , В , С ; СУ-А, СУ-В, СУ-С – система управления каналов фаз А , В , С ; БСВ – блок силовых вентилей)
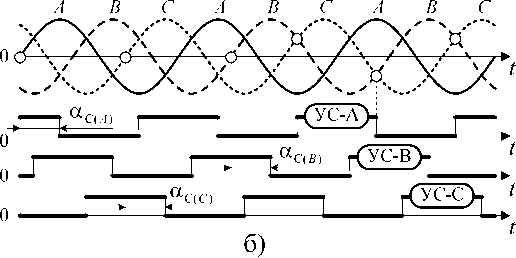
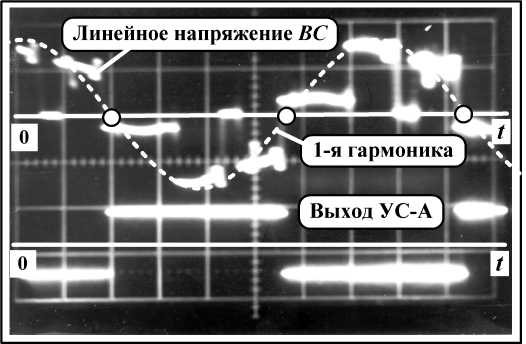
Рис. 8. Осциллограмма линейного напряжения сети и выходного сигнала адаптивного интегрирующего УС при совместной работе нескольких тиристорных преобразователей на источник электропитания «малой» мощности
линейного напряжения ВС и выходного сигнала УС-А адаптивного интегрирующего УС, работающего по перекрестной схеме (рис. 7а) в системе управления реверсивным тиристорным выпрямителем для электропривода постоянного тока. Эксперимент проводился на дизель-генераторной станции буровой установки при работе группы ВП с общей загрузкой станции около 90 %. Несмотря на аномально высокий уровень искажения напряжения сети, была обеспечена безотказная работа всего технологического комплекса, когда отклонение угла синхронизации практически полностью отсутствует между первой гармоникой линейного напряжения ВС и выходным сигналом УС-А. Это достигается за счет замкнутого характера структуры РП и наличия интегратора в ее прямом канале регулирования, когда по отношению к синхронизирующему воздействию система представляет собой апериодический фильтр первого порядка с эквивалентной постоянной времени, перестраиваемой в зависимости от параметров напряжения сети.
Схема синхронизации, представленная на рис. 2а, также прошла испытания на 84 тиристорных регуляторах переменного напряжения для плавного пуска асинхронных электроприводов [22, 23] на ОАО «Челябинский трубопрокатный завод» и показала высокую помехоустойчивость и эксплуатационную надёжность.
Заключение
Дан анализ статических и динамических характеристик адаптивного интегрирующего УС, в основе которого лежит принцип интегрирующего развертывающего преобразования. УС представляет нелинейную импульсную систему, построенную на основе замкнутой структуры интегрирующего развертывающего преобразователя, работающего в режиме внешней синхронизации с частотой напряжения сети. Установлено, что для адаптивного интегрирующего УС частоту собственных автоколебаний следует выбирать равной номинальной частоте сигнала синхронизации, что исключает «выпадение» устройства из режима внешней синхронизации при значительных провалах напряжения сети. При отклонениях частоты питающего напряжения вышеупомянутое равенство поддерживается за счет блока коррекции частоты, входящего в состав устройства.
Показано, что адаптивное интегрирующее УС полностью адаптируется к нестабильности амплитуды и частоты напряжения сети в пределах ±50 % и выше. В отличие от известных систем синхронизации предложенное УС представляет собой апериодический фильтр первого порядка W(p)=1I(ТЭ p + 1) с эквивалентной постоянной времени (TЭ ≈ (π ⋅ АС ⋅ ТС)I16 и TЭ ≈0,25⋅АС⋅ТС для гармонического и прямоугольного сигналов синхронизации), автоматически перестраиваемой в зависимости от амплитуды и частоты напряжения сети. Это свойство адаптивного интегрирующего УС позволяет подавлять высшие гармоники в питающей сети при нестабильности частоты в пределах ±50 % и выше. Кроме того, предложенное синхронизирующее устройство обладает высокой помехоустойчивостью по отношению к коммутационным искажениям напряжения сети. Это достигается за счет замкнутого характера структуры РП и наличия интегратора в ее прямом канале регулирования.
Предложен перекрёстный способ синхронизации каналов систем управления ВП на основе адаптивного интегрирующего УС. Результаты практического применения перекрестной схемы синхронизации в составе систем управления реверсивного тиристорного выпрямителя для электропривода постоянного тока и тиристорного регулятора напряжения для плавного пуска асинхронных электродвигателей показали ее высокую помехоустойчивость и эксплуатационную надёжность.
Таким образом, предложенное в статье адаптивное интегрирующее УС рекомендуется к применению в системах управления ВП, которые получают питание от автономной энергосистемы «малой» мощности с высоким уровнем искажений (высшие гармоники и коммутационные провалы) и нестабильными параметрами напряжения сети.
Список литературы Адаптивное интегрирующее устройство синхронизации для систем управления силовыми вентильными преобразователями
- Tihanyi, L. EMC in Power Electronics / L. Tihanyi. - New York: IEEE Press, 1995. - 402 p.
- ГОСТ 32144-2013. Электрическая энергия. Совместимость технических средств электромагнитная. Норма качества электрической энергии в системах электроснабжения общего назначения. - М.: Стандартинформ, 2014. - 20 с.
- Ott, H.W. Noise reduction techniques in electronic systems / H.W Ott. - 2nd ed. - New York: John Wiley & Sons, 1988. - 448 p.
- Иванов, А.Г. Системы управления полупроводниковыми преобразователями / А.Г. Иванов, Г.А. Белов, А.Г. Сергеев. - Чебоксары: Изд-во Чуваш. ун-та, 2010. - 448 с.
- Дудкин, М.М. Адаптивные интегрирующие устройства для управления силовыми вентильными преобразователями / М.М. Дудкин, Л.И. Цытович // Электротехника. - 2015. - № 12. - С. 2-6.
- Jacques, J. A Tracking Bandpass Filter for the Rejection of Power System Disturbances / J. Jacques, F.P. Dawson and R. Boriert // 1993 EPE'935th European Conf. on Power Electronics and Applications. 13-16 Sept. - UK: Brighton, 1993. - Vol. 4. - P. 47-52.
- Wolaver, D.H. Phase Locked Loop Circuit Design / D.H. Wolaver. - Englewood Cliffs, New Jersey: Prentice Hall, 1991. - 262 c.
- Liccardo, F. Robust and Fast Three-Phase PLL Tracking System / F. Liccardo, P. Marino, G. Raimondo // IEEE Transactions on Industrial Electronics, January 2011. - Vol. 58, no. 1. - P. 221-231.
- DOI: 10.1109/TIE.2010.2044735
- Decoupled Double Synchronous Reference Frame PLL for Power Converters Control / P Rodriguez, J. Pou, J. Bergas et al. // IEEE Transactions on Power Electronics, March 2007. - Vol. 22, no. 2. - P. 584-592.
- DOI: 10.1109/TPEL.2006.890000
- Bose, В.K. Power Electronics and Variable Frequency Drives / В.K. Bose. - New York: IEEE Press, 1996. - 822 p.
- Пат. 2513024 Российская Федерация, МПК7 Н 02 М 1/08. Адаптивное интегрирующее устройство синхронизации / М.М. Дудкин; заявитель и патентообладатель Юж.-Урал. гос. ун-т. - № 2012128705/07; заявл. 09.07.12; опубл. 20.04.14, Бюл. № 11.
- Dudkin, M.M. Adaptive units and control systems of power semiconductor converters on the basis of integrating scanning conversion / M.M. Dudkin, L.I. Tsytovich, A.S. Nesterov // Procedia Engineering: International Conference on Industrial Engineering (ICIE-2015). - 2015. - Vol. 129. - P. 933-939.
- DOI: 10.1016/j.proeng.2015.12.138
- Дудкин, М.М. Спектральные характеристики развертывающих преобразователей с широтно-импульсной и частотно-широтно-импульсной модуляцией / М.М. Дудкин, Л.И. Цытович, О.Г. Брылина // Электротехника. - 2013. - № 10. - С. 18-25.
- Аналого-цифровой преобразователь с интегрирующей синфазной амплитудно-частотно-импульсной модуляцией для систем вентильного электропривода / Л.И. Цытович, О.Г. Брылина, М.М. Дудкин и др. // Электротехника. - 2013. - № 5. - С. 10-15.
- Integrating pulse-number ADC with high temporal and temperature stability of characteristics / L.I. Tsytovich, M.M. Dudkin, O.G. Brylina, A.V. Tyugaev // Automatic Control and Computer Sciences. - 2015. - Vol. 49, no. 2. - P. 103-109.
- Динамика линий связи с широтно- и частотно-широтно-импульсными носителями информации. Теория и практика / Л.И. Цытович, М.М. Дудкин, О.Г. Брылина, А.В. Тюгаев // Электротехника. - 2014. - № 4.- С. 2-9.
- About the Dynamics of Some Methods of Integrating Conversion of Analog Signal into Digital Code / L.I. Tsytovich, M.M. Dudkin, S.P. Lokhov, O.G. Brylina // Вестник ЮУрГУ. Серия «Энергетика». - 2013. - Т. 13, № 1. - С. 80-91.
- Помехоустойчивая интегрирующая синхронизация ведомых сетью вентильных преобразователей / Л.И. Цытович, М.М. Дудкин, Р.М. Рахматулин и др. // Энергетик. - 2014. - № 6. - С. 15-18.
- Адаптивная интервало-кодовая двоично-десятичная интегрирующая синхронизация систем управления силовыми вентильными преобразователями / Л.И. Цытович, О.Г. Брылина, М.М. Дудкин, Р.М. Рахматулин // Электротехника. - 2013. - № 3. - С. 8-15.
- Цытович, Л.И. Динамика развертывающих преобразователей с выборкой мгновенных значений сигнала управления и различными законами модуляции / Л.И. Цытович, М.М. Дудкин // Электротехника. - 2014. - № 10.- С. 33-41.
- Дудкин, М.М. Энергосберегающие технологии в испытательных стендах с использованием однофазных обратимых преобразователей / М.М. Дудкин // Вестник ЮУрГУ. Серия «Энергетика». - 2013. - Т. 13, № 1. - С. 5-18.
- Дудкин, М.М. Тиристорный регулятор напряжения с адаптивной интегрирующей системой управления для плавного пуска асинхронных электродвигателей / М.М. Дудкин // Вестник ЮУрГУ. Серия «Энергетика». - 2014. - Т. 14, № 2. - С. 36-43.
- Частотно-широтно-импульсный адаптивный регулятор переменного напряжения с интегрирующей системой управления / М.М. Дудкин, О.Г. Брылина, Л.И. Цытович, А.В. Тюгаев // Вестник ЮУрГУ. Серия «Энергетика». - 2013. - Т. 13, № 2. - С. 45-52.
