Адаптивное обнаружение сигнала на фоне нестационарной помехи

Автор: Непомнящий Г.А.
Статья в выпуске: 23 (240), 2011 года.
Бесплатный доступ
Рассматривается вариант адаптивного обнаружителя, устойчивого к наличию нескольких интенсивных мешающих сигналов в зоне обнаружения. Приводится сравнение характеристик обнаружения предлагаемого алгоритма относительно оптимального обнаружителя и адаптивного обнаружителя, не учитывающего наличие мешающих сигналов.
Адаптивное обнаружение, нестационарная помеха, обнаружение близкорасположенных целей
Короткий адрес: https://sciup.org/147154745
IDR: 147154745 | УДК: 621.376
Adaptive detection of signals corrupted by unsteady interference
The article discusses options for the adaptive detector is resistant to the presence of several intense interfering signals in the detection zone. A comparison of characteristics of the proposed detection algorithm on the optimal detector and an adaptive detector, which ignores the presence of interfering signals.
Текст научной статьи Адаптивное обнаружение сигнала на фоне нестационарной помехи
Введение 1
В системах радиолокации (РЛС) важной зада-чей является стабилизация уровня ложных тревог (СУЛТ) [1, 2, 4, 5]. В условиях априорной неопре-деленности относительно параметров распределе-ния помехи СУЛТ может быть обеспечена приме-нением адаптивных параметрических алгоритмов обнаружения сигнала [1‒6].
Если помеха имеет стационарный характер, то реализация адаптивного обнаружителя не вызыва-ет особых затруднений, а качество его работы при достаточно большом объеме выборки мало усту-пает оптимальной обработке. В то же время неста-ционарность помехи может существенно снизить качество работы приемника [1, 4, 6]. Причиной нестационарности помехи могут быть как предна-меренные импульсные помехи, так и сигналы, от-раженные от целей, близкорасположенных к нс-следуемому элементу дальности РЛС.
Для уменьшения влияния мешающих сигна-лов на значение вероятностей ложного и правиль-ного обнаружения применяют специальные меры. Так,в [6] предлагается «метод контраста». Суть данного метода заключается в поочередном срав-нении отношений соседних выборок с некоторым порогом и удалении элементов выборки, не удов-летворяющих определенным условиям. Выбор оптимального значения порога проводится мето- дом моделирования.в [1] приводится структура адаптивного обнаружителя, в которой для умень-шения влияния близкорасположенных целей ис-пользуется ранжирование элементов выборки и вычисление порога обнаружения по элементу вы-борки из области больших амплитуд. Известны и другие способы повышения качества адаптивных обнаружителей в условиях мешающих сигналов [5]. Общими недостатками рассматриваемых адаптив-ных алгоритмов обнаружения являются относи-тельная сложность реализации и необходимость управления порогом обнаружения.
В настоящей статье исследуется простой ва-риант адаптивного обнаружителя с фиксирован-ным порогом, устойчивого к наличию нескольких мешающих интенсивных сигналов.
Постановка задачи
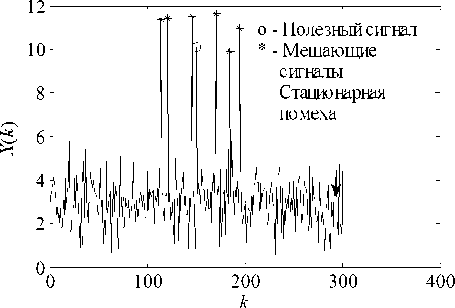
На вход цифрового обнаружителя поступает смесь стационарной помехи n ( k ), нескольких ме-шающих сигналов Si ( k ), i = 1… M И, возможно, по -лезного сигнала S 0( k ) (рис. 1):
H0 :X(k) M Si (k) n(k), i1
H 1 : X ( k ) S 0( k ) M Si ( k ) n ( k ).
i 1
. 1.
Стационарная помеха n ( к ) является нормальным некоррелированным процессом с неизвест-ными средним тп и среднеквадратическим отклонением (СКО) Оп- Амплитуды сигналов Ai ( i= 1...М) также неизвестны.
Необходимо предложить алгоритм обнаруже-ния сигнала S 0( к ) c фиксированным порогом обнаружения , адаптивный к параметрам стационарной помехи и устойчивый к наличию нескольких ме-шающих сигналов.
Предлагаемое решение
Рассмотрим схему простейшего адаптивного обнаружителя (рис. 2) [1, 2]. Отсчеты сигнала X ( к ) запоминаются в ОЗУ ( к = 1... K). Для отсчета X ( n ) по N - 1 соседним отсчетам, оцениваются среднее и СКО стационарной помехи ( N -1 - размер выборки). Далее величина X ( n ) нормируется путем вычитания оценочного среднего тп и деления на оце-ночное СКО стп. Полученные таким образом отсчеты нормированной статистики X H( n ) сравниваются с фиксированным порогом у. Порог у обеспечивает требуемое значение вероятности ложной тревоги PF .
Если в интервале дальности, соответствующем выборке помехи, мешающие сигналы отсутствуют , то выборка является однородной и качество работы обнаружителя зависит только от разме-ра выборки. Наличие интенсивных мешающих
сигналов в зоне выборки приводит к ошибкам в оценивании среднего и СКО стационарной поме -хи: оценки тп и дп смещаются в область больших значений. В результате вероятности PF (ложной тревоги) и PD (правильного обнаружения) снижаются . Уменьшение PF само по себе является желательным результатом. В то же время одновременное уменьшение величины P d говорит о снижении эффекта адаптации.
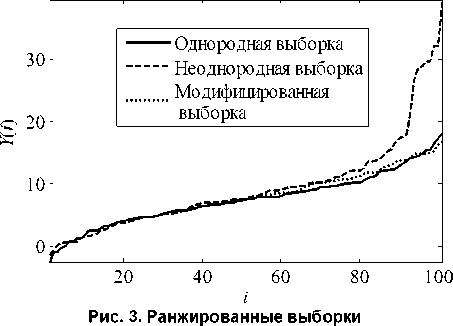
На рис. 3 изображена ранжированная выборка Y ( i ), i = 1... N -1, полученная из исходной выборки Xj ), j = ( n~N /2)^( n -1), ( n +1)^( n + N /2) путем расстановки элементов выборки в порядке возрас-тания. В случае однородной выборки X ранжированная выборка Y сходится к нечетной функции при N—> да. Наличие мешающих сигналов (неоднородная выборка) приводит к задиранию «хвоста» ранжированной выборки Y и в этом случае при N—>да Y к нечетной функции не сходится.
Поставленная задача может быть эффективно решена путем удаления из Y последних М элементов , где М - число мешающих сигналов. Но поскольку М - неизвестный параметр, такой путь
решения является затруднительным.
Суть предлагаемого решения состоит в еле -дующем. Нетрудно определить, что при малом
числе мешающих сигналов относительно размера выборки однородная и неоднородная выборки в среднем мало отличаются для i = 1...( N + 1)/2 (на рис. 3 N =101). Поэтому, используя первую половину Y ( i ), путем ее нечетного отображения можно получить модифицированную ранжированную выборку Y M( i ), которая в среднем мало отличается от однородной выборки стационарной помехи.
При этом фактический размер выборки Y M, по которой оцениваются параметры стационарной
помехи, уменьшается в два раза относительно ис ходной выборки А':
Y ( i ), i = 1.
Y M ( i ) =
N + 1

N + 1 _Y N + 1
2 J I 2
i
N + 3
N .
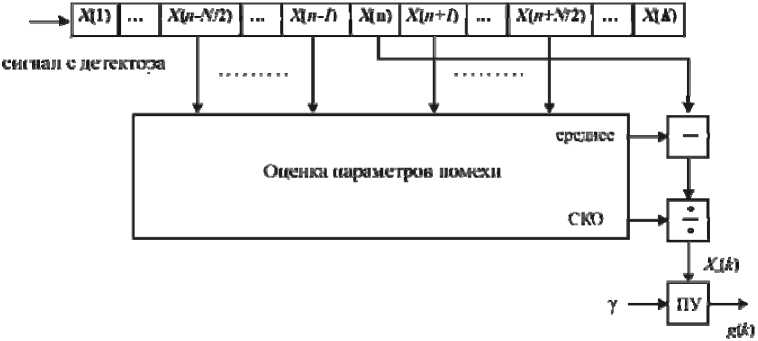
. 2. ( ‒ )
Очевидно, что эффективность предлагаемого способа зависит как от размера исходной выборки, так и от относительного числа мешающих сигна-ЛОВ m = M / N .
Результаты моделирования
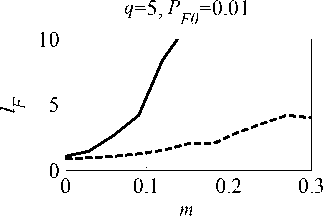
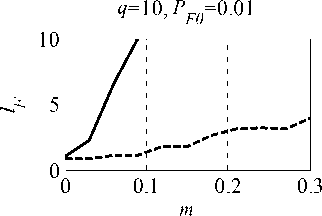
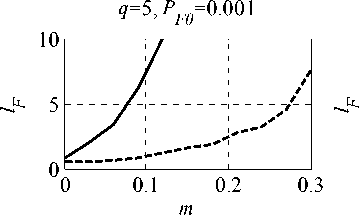
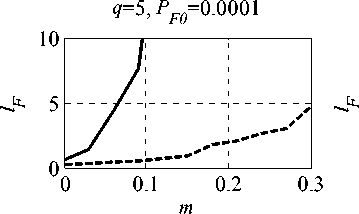
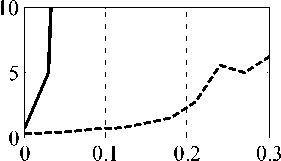
На рис . 4 изображены зависимости относи-тельного уменьшения вероятности ложной тревоги lF = PF0/PF (PF0 ‒ значение вероятности ложной тревоги, соответствующее оптимальной обработ-ке , PF ‒ фактическое значение вероятности ложной тревоги) от относительного числа мешающих сиг-налов m. Амплитуды мешающих сигналов в Jq раз превышают СКО стационарной помехи, пара-метры которой задаются случайным образом. Раз-мер исходной выборки 101. Представленные зави-симости получены методом статистического моде-лирования на ЭВМ (размер статистики 100/PF0).
Как видно , уже при 10 %-ном заполнении вы-борки мешающими сигналами PF для исходного адаптивного алгоритма обнаружения может сни-зиться на порядок и более. В то же время примене-ние ранжирования выборки и преобразования (2) приводит к заметной СУЛТ: 20 %-ном запол-нении выборки мешающими сигналами PF с нижа -ется менее чем в 3 раза.
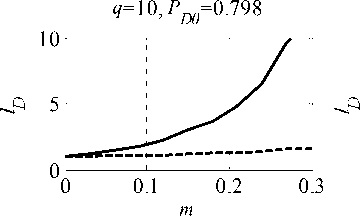
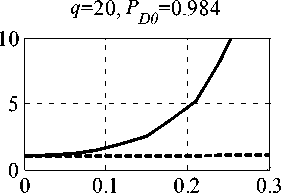
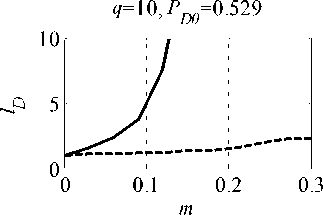
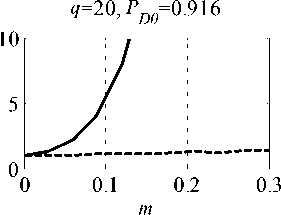
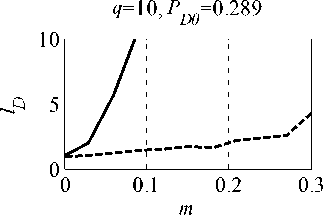
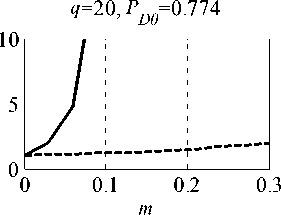
Зависимости относительного уменьшения ве-роятности правильного обнаружения lD = PD 0/ PD ( PD 0 ‒ значение вероятности правильного обнару-жения, соответствующее оптимальной обработке, PD ‒ фактическое значение вероятности правиль-ного обнаружения) от относительного числа ме-шающих сигналов m изображены на рис. 5. Ам -плитуды полезного и мешающих сигналов в Jq раз превышают СКО стационарной помехи. Раз-мер статистики при моделировании 1000.
Как видно , использование предлагаемого ал-горитма обнаружения препятствует существенно-му снижению PD , которое имеет место в случае простого алгоритма адаптации, не учитывающего
q =10, PF0 =0.001
0.1 0.2 0.3
m
---Адаптивный
q =10, PF0 =0.0001
m
-
■—Адаптивный с преобразованием выборки
Рис. 4. Зависимости lF ОТ m
m
---Адаптивный ------Адаптивный с преобразованием выборки
Рис. 5. Зависимости lD ОТ m наличие мешающих сигналов : 20 %-ном за-полнении выборки мешающими сигналами PD снижается в 5 раз и более . Применение ранжиро-вания выборки и преобразования (2) обеспечивает снижение PD не более чем в 2 раза при m=0,2.
Заключение
Предложенный вариант адаптивного обнару-жителя позволяет повысить стабильность вероят-ностей ложной тревоги и правильного обнаруже-ния в условиях воздействия нормальной стацио-нарной помехи с неизвестными параметрами и наличия нескольких интенсивных мешающих сиг-налов. Количество мешающих сигналов, при кото-ром обеспечивается приемлемая стабильность ве-роятностей, составляет до 10‒20 % от размера вы-борки.
Рассмотренный вариант обнаружителя может быть полезен в задачах обнаружения-разрешения нескольких близкорасположенных целей. При этом каждый из сигналов Si ( k ), i =0… М может рассмат-риваться как полезный, а все остальные М сигна-ЛОВ ‒ мешающие по отношению к нему .
Список литературы Адаптивное обнаружение сигнала на фоне нестационарной помехи
- Защита радиолокационных систем от помех. Состояние и тенденции развития/под ред. А.И. Канащенкова и В.И. Меркулова. -М.: Радиотехника, 2003. -416 с.
- Ширман, Я.Д. Теория и техника обработки радиолокационной информации на фоне помех/Я.Д. Ширман, В.Н. Манжос. -М.: Радио и связь, 1981. -416 с.
- Левин, Б.Р. Теоретические основы статистической радиотехники/Б.Р. Левин. -М.: Радио и связь, 1989. -656 с.
- Кузьмин, С.З. Основы проектирования систем цифровой обработки радиолокационной информации/С.З. Кузьмин. -М.: Радио и связь, 1986. -352 с.
- Справочник по радиолокации: в 4 т. Т. 1. Основы радиолокации/под ред. М. Сколника; пер. с англ. под общей ред. К.Н. Трофимова. -М.: Советское радио, 1976. -456 с.
- Оводенко, А.А. Робастные локационные устройства/А.А. Оводенко. -Л.: ЛГУ, 1981. -185 с.
