Адаптивные алгоритмы быстрого поиска многоуровневых шумоподобных сигналов

Автор: Петров Е.П., Чащин А.А.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии телекоммуникаций
Статья в выпуске: 2 т.6, 2008 года.
Бесплатный доступ
В работе получены варианты адаптивных алгоритмов быстрого поиска многоуровневых шумоподобных сигналов (ШПС), сформированных на основе многозначных линейных рекуррентных последовательностей максимального периода (МЛРП). Проведен анализ времени поиска ШПС.
Короткий адрес: https://sciup.org/140191226
IDR: 140191226 | УДК: 621.391.82
Adaptive algorithms of fast-access retrieval of multilevel pseudonoise signals
The versions of adaptive algorithms of fast-access retrieval of multilevel pseudonoise signals (PNS), based on multi-valued linear feedback shift-register sequences (LFSR-sequences) is obtained in this work. The analysis of a retrieval time PNS is conducted.
Текст научной статьи Адаптивные алгоритмы быстрого поиска многоуровневых шумоподобных сигналов
В работе получены варианты адаптивных алгоритмов быстрого поиска многоуровневых шумоподобных сигналов (ШПС), сформированных на основе многозначных линейных рекуррентных последовательностей максимального периода (МЛРП). Проведен анализ времени поиска ШПС.
Постановка задачи
Системы связи с кодовым разделением, использующие для передачи информации шумоподобные сигналы, содержат в своем составе приемное устройство (ПУ), осуществляющее поиск и синхронизацию с искомой последовательностью. Для обеспечения высокой конфиденциальности передачи сообщений в таких системах применяют бинарные ШПС большого периода, что усложняет реализацию приемных устройств, основанных на классических методах корреляционного поиска или поиска на основе согласованных фильтров [1].
Использование в системах связи МЛРП с основаниями q > 2 позволяет существенно увеличить ансамбль кодовых последовательностей по сравнению с двоичными МЛРП и усложнить распознавание правила формирования ПСП в ШПС, повысив тем самым конфиденциальность адресных систем связи.
Будем полагать, что на входе ПУ в каждом такте работы системы k = 1,2... на интервале T = t (k + i) _ t (k) наблюдается аддитивная смесь сигнала и шума x ( t ) = s (^ k ) + n ( t ) , где s (^k) - элементарный радиоимпульс ШПС, дискретный параметр которого μk (манипулированная частота, фаза и т.д.) в соответствии с правилом кодирования МЛРП, принима ю щей одно из q возможных значений M i , i = 1, q ; n ( t ) — реализация белого гауссовского шума с нулевым средним и дисперсией σ 2 n . Известно, что МЛРП представляет собой сложную детерминированную цепь Маркова [3].
Используя теорию условных марковских процессов требуется разработать адаптивные алгоритмы быстрого поиска ШПС, сформированных на основе многозначных МЛРП с основанием q≥ 2 .
Уравнения фильтрации дискретного параметра ШПС
Символы МЛР a k с произвольным числом значений q формируются в соответствии с рекуррентным правилом кодирования [1]:
m
ak =1Z cak- I mod q,
V i = 1 )
где c i ( i = 1... m ) – целочисленные коэффициенты, k – номер такта. В МЛРП последовательность m -значных комбинаций можно интерпретиро ва ть как цепь Маркова с q значениями M i ( i = 1, q ) и вероятностями перехода между значениями принимаемого в ( k + 1)-м такте работы системы ^ k + 1 = M. и сформированного в k-ом такте j
^ k = M i :
п и = n ( ^ + i = M j |n k = M i ) , i , j = i, q .
При отсутствии шума ^ k + 1 = ^ k .
Учитывая, что μ k+1 и μ k формируются по одному правилу и образуют q- значную детерминированную цепь Маркова уравнение для апостериорной плотности вероятности pa + 1 ( ц к + 1 ) значений дискретного параметра искомого ШПС в ( k + 1)-м такте можно записать в виде [3]:
P a + 1 ( H k + i ) = c X exp { f ( H k + i ) } X X J P a ( h k ) w ( H k + 1 |h k ) d H k ,
где
c - коэффициент нормировки, f ( ^ k + 1 )
– логарифм функции правдоподобия параметра
^ k + 1 , w ( H k + 1 |n k )
– плотность вероятности пе- ^
рехода из значения μ k в k-ом такте в μ k+1 на ( k + 1)-м такте.
Представим в (2) апостериорные плотности вероятности и плотность вероятности перехода в виде:
q
Pk (Hk) = Zp^k)8 (Hk - Mi),
q pac+i (^k+1) = ZpJ(k+1)8(^k+1 - Mj), j=i
w(^k+1 |hk) = Znj8 (Hk+1 - Mj), j=1
где Р^к ) , p j ( k + 1 ) — апостериорные вероятности значений параметров ^ k в k -м такте и ^ k + 1 в ( к +1)-м такте соответственно; 8 ( • ) -дельтафункция.
Подставив уравнения (3)-(5) в (2), проинтегрировав и приравняв коэффициенты при одинаковых дельта функциях, получим систему рекуррентных уравнений для финальной апостериорной вероятности дискретного параметра ШПС:
q
Р j ( k + 1 ) = c х exP { f k + i ( M j )} E P (k ) п и , (6)
= 1
где j = й; fk+1 (Mj) = f (^+1 = Mj).
Уравнения (6) являются основой для синтеза приемных устройств фильтрации ШПС, построенных на МЛРП с произвольным основанием.
Синтез приемного устройства ШПС
Для удобства различения значений дискретного параметра переведем уравнения (6) в аддитивную форму. Для этого разделим каждое j-e уравнение в (6) на последнее ( j = q ) уравнение и, прологарифмировав обе части результата, получим:
u1( k + 1) = [ fk + 1 ( M1 ) — ft + 1 ( Mq )] + 'll 1(k) + z1(k), u j(k + 1) = [ fk + 1 (Mj ) — fk + 1 ( Mq )] + u j(k) + zj(k) , канала нелинейного фильтра формируется следующим образом [4]:
|uv ( k)| , ^ k = M j ,
u j(k) =<0, Цk * Mj , Цk * Mq, (9)
— |uv(k)| , П, = Mq ,
где j = 1,(q -1),
μ k =M j ,
(10) μ k =M q ,
⋅ – операция усреднения.
В частном случае вырожденной цепи Маркова, когда n i = 1 , функция z дк ) = 0 и система уравнений (7) принимает вид:
u 1( k + 1) = [ fk + 1 ( M 1 ) — fk + 1 ( Mq ) ] + uKk ) ,
u2(k+1) = Гf t+1 (M2 ) — f t+1 (Mq )-| + u2(k),
u(q-1)(k+1) = Гfk+1 (M(q-1) ) — f t+1 ( Mq )] + uj(k) ’ то есть осуществляется «чистое» накопление ШПС.
Примем в качестве критерия различения значений дискретного параметра ^k+1 = {M1,...,Mq} критерий максимума логарифма отношения апос териорных вероятностей uj(k+1), j = 1,(q -1):
u ( q - 1\ k + 1) = [ fk + 1 ( M ( q - 1) ) fk + 1 ( M q ^ +
^k+1 = 1
[ M v ,
A
+ u (-Hx k ) + z ( q - 1)( k ) ,
где j = 1,(q -1),
q - 1
E {exp( i=1,i*
A
A
U i (k ) U j ( k )
+
z j ( k ) = ln
( A
U j( k ) ) + n jj
x4 \ I
EjexP (Ui(k) ) niq } + % i=1
M q ,
u v(k + 1)
u v(k + 1)
где u v ( k +1) = max { u 1( k +1) ,
< °’ (12)
.., u v ( k +1) ..., u ( q —1)( k +1) } ;
ин-
декс v = 1,(q -1) относится к каналу выделения дискретного параметра ^ k + 1 ■
В качестве критерия обнаружения искомого ШПС примем критерий Неймана-Пирсона [2],
в соответствии с которым решение о наличии, либо отсутствии сигнала выносится на основании сравнения накопленного сигнала на выходе ПУ |u v (k)| с порогом h :
| uv (к )| ^ h ,
где uj(k + 1) = ln ( Pj(k +1)/Pq(.k + 1) ) - логарифм отношения апостериорных вероятностей значений дискретного параметра ^k+1, uj(k) - оценка напряжения uj(k+1) в k-м такте, которая при отсутствии шума совпадает с uj(k+1). Оценка u jk) для j-го где h определяется, исходя из заданной вероятности ложной тревоги а.
При условии, что элементы МВП заданы следующим образом:
п м = ( 1 -п н Жq - 1 ) , (i * j ); i , j = i, q , (14)
тогда с учетом (14) и (9) выражение (8) после некоторых преобразований можно представить в более кратком виде [4]:
z j ( k ) = sign ( u j (k ) ) x
~ in
Пи( к + 1) = <
n ii (k ) + An ii ,
2 пй( k )
A
- An ii ,
×ln
π ii +π ij
π ii +π ij
где sign ( u j(k ) ) -
,i≠j ,
a out
Пи( к + 1) = *
Пи ( k ) + АП- ,
A
Пи ( k )
- Δπ ii ,
Z^ in __ H , ^ k + 1 = ^ k ;
, in
^ k + 1 ^ ^ k •
A
^ k + 1 = ^ k
A ,
^ k + 1 ^ ^ k
где
Пн ( k ) - оценка значений
диагональных
эле-
знак, вычисляемый согласно
ментов МВП на k -ом такте, Δπ ii – шаг адаптации. Значения элементов МВП π ij ограничены диапа-
условию (9); значение гласно (10).
|u v(k)| формируется со-
зоном П и мировки
е [ 1 q ;1 ] и удовлетворяют условию нор-
Рассмотрим комбинированный алгоритм адаптации, основанный на работе алгоритмов адаптации по выходу и по входу. Алгоритм комбинированной адаптации описывается уравнением
q
^ n ij = 1; i , j e Z; i = 1, q .
j =1
i = const
2 in
Пн ( к + 1) = <
n a^k ) , V l > K ; l = ( k - K + 1), k : nU ( i ) = 1
2 out ,(16)
П н ( к )
где K – порог переключения (в тактах) c адаптации по выходу на адаптацию по входу;
in out
Пп( к ) и Пн( k )
–
оценки значений элементов
МВП, полученные в случае работы алгоритма адаптации по входу (17) и алгоритма адаптации по выходу (18) соответственно
Обобщенная структура модифицированного ПУ быстрого поиска с комбинированной адаптацией, реализующая алгоритм (7) с нелинейной функцией (15) и алгоритм адаптации (16), представлена на рис. 1.
Устройство состоит из дискриминатора (Д) с ( q – 1) выходами, формирующего разности логарифмов функций правдоподобия f ( M j ) — f ( M q ) ; многоканального нелинейного фильтра с ( q – 1) каналами; блока вычисле-
ния
нелинейной функции (БНФ) z (| u v ( к ) | , п у ( к ) ) ;
;
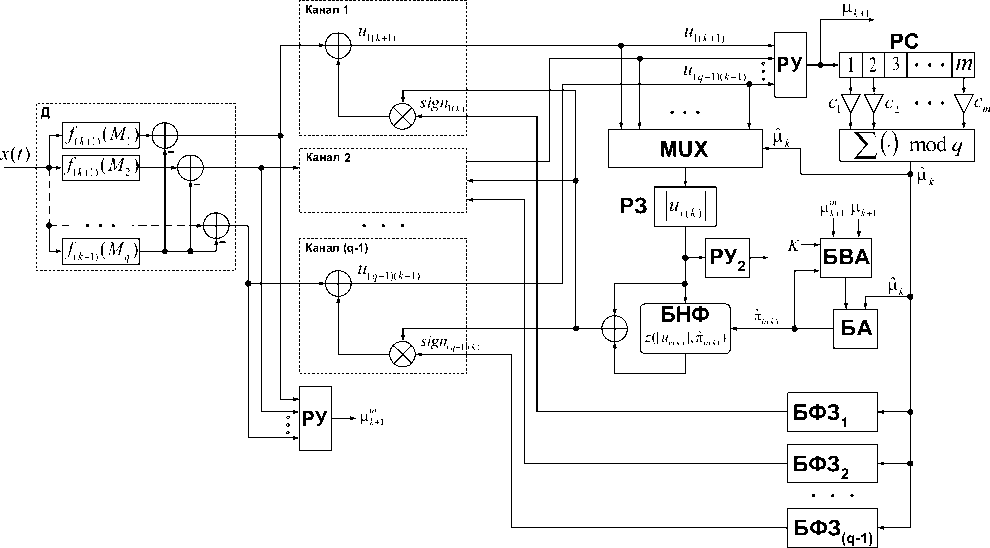
Рис. 1. Обобщенная структура модифицированного ПУ с комбинированной адаптацией
сумматора; регистра задержки (РЗ) на такт для хранения модуля |u v (k J; сумматоров ( ® ); и умножителей ( ® ); решающего устройства (РУ) для различения значений МЛРП в соответствии с (12), и аналогичного РУ на входе НФ; регистра сдвига (РС) m -значной комбинации символов ПСП; мультиплексора (MUX) для формирования |u v(k)| ; блоков формирования знаков (БФЗ) значения |u v (k)| ; решающего устройства (РУ 2 ), определяющего наличие, либо отсутствие ШПС в соответствии с (13); блока адаптации (БА); блока выбора адаптации (БВА).
В случае ПУ с адаптацией по входу структура ПУ (рис. 1) отличается отсутствием блока БВА, а изменение МВП производится блоком БА на основании сравнения оценки |д k c ц к согласно (17). В случае ПУ с адаптацией по выходу структура ПУ (рис. 1) отличается отсутствием блока БВА и блока РУ на входе нелинейного фильтра (НФ), а изменение МВП производится блоком БА на основании сравнения оценки ^ k c ^ k + 1 согласно (18).
Входными параметрами блока БВА являются значения дискретных параметров ^" + 1 и ^ k + 1 , полученные со входа и выхода НФ соответственно, а также значения оценки п щк ) и порога переключения K с адаптации по выходу на адаптацию по входу. Параметр K ≥ 0 задается априорно. Блок БВА согласно алгоритму (16) определяет моменты времени поочередной работы алгоритма адаптации по выходу и алгоритма адаптации по входу.
В отличие от структуры ПУ, реализуемой с помощью уравнений фильтрации (7)-(9) и имеющий в своем состав ( q – 1) блоков БНФ (8), в модифицированном ПУ (рис. 1) присутствует единственный более простой блок БНФ, описываемый уравнением (15).
Анализ времени поиска ШПС
При решении задачи одновременного обнаружения и распознавания (поиск) ШПС приемным устройством (рис. 1), возможны ошибки следующего вида [2].
Ошибка ложной тревоги ( α ) возникает при принятии решения о наличии ШПС, когда искомый сигнал на входе ПУ отсутствует. Ошибка пропуска ШПС ( ß ) возникает при принятии решения об отсутствии ШПС, когда искомый сигнал присутствует на входе ПУ. Ошибка искажения ШПС ( γ ) возникает при неправильном распознавании ШПС в случае его обнаружения.
Введем вероятность правильного одновременного обнаружения и распознавания m -значных комбинаций МЛРП d :
d = ( 1 “Y )( 1 -а) . (20)
На рис. 2-3 приведены зависимости вероятности правильного одновременного обнаружения и распознавания m -значных комбинаций МЛРП d искомого ШПС от времени поиска ШПС T ПОИСКА при заданной вероятности ложной тревоги α для трех алгоритмов адаптивной нелинейной фильтрации: АНФ(вх) – с адаптацией по входу, АНФ(вых) – с адаптацией по выходу и АНФ(комб20) – с комбинированной адаптацией при пороге переключения K = 20 тактов.
Анализ времени поиска проводился для двух случаев: рис. 2 соответствует случаю, когда искомый сигнал появляется на входе ПУ на k СИГ = 1 такте с момента начала фильтрации ШПС ( к сИГ – номер такта фильтрации, на котором появился искомый ШПС на входе ПУ); рис. 3 соответствует случаю, когда искомый сигнал появляется на входе ПУ только с k СИГ = 201 такта с момента начала фильтрации ШПС (до 200-го такта сигнал на входе ПУ отсутствует). Результаты анализа приведены при заданном отношении сигнал/шум (по мощности) на входе ПУ при р Э = 0 дБ и вероятностях ложной тревоги а = 0,01 (сплошная линия) и α = 0, 001 (пунктирная линия). Правило кодирования МЛРП ШПС для всех случаев при q = 7, m = 3: a k = (5 ak -1 + 3 ak - 2 + 5 a k - 3 ) mod 7 .
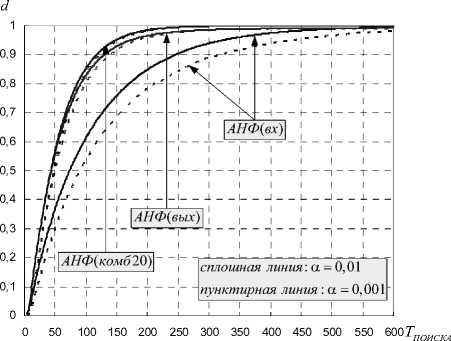
Рис. 2. Время поиска ШПС при k СИГ = 1 .
Как видно из рис. 2-3, с увеличением времени появления сигнала кСИГ скорость роста вероятности d на начальных тактах с момента появления сигнала на входе ПУ уменьшается. Чем больше время поиска ШПС, тем выше вероятность правильного обнаружения, но при этом снижается скорость поиска ШПС.
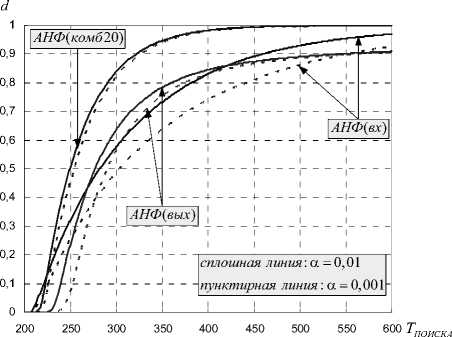
Рис. 3. Время поиска ШПС при k СИГ = 201
Для примера определим вероятность правильного одновременного обнаружения и распознавания
m
-значных комбинаций МЛРП
d
для приведенных результатов (рис. 2-3) при следующих заданных условиях: МЛРП с параметрами
q
= 7,
m
= 7 и периодом
L
=
q
m
-1
=
7
3
-1
=
342 символа; отношение сигнал/шум (по мощности)
р
Э
= 0
дБ
; вероятность ложной тревоги
α = 0, 001
; время поиска ШПС
T
ПОИСКА
=300
(где
T
ПОИСКА
В условиях примера вероятность того, что искомый ШПС будет обнаружен и правильно распознана m-значная комбинация МЛРП равна d=0,99814 (рис. 2) и d=0,81924 (рис. 3) в случае алгоритма с комбинированной адаптацией АНФ ( комб20 ); в случае алгоритмов с адаптацией по входу ( АНФ ( вх )) и выходу ( АНФ ( вых )) вероятность d на интервале поиска T ПОИСКА гораздо меньше: для АНФ ( вх ) вероятность d = 0,88933 (рис. 2) и d = 0,48561 (рис. 3); для АНФ(вых) вероятность d = 0,98415 (рис. 2) и d = 0,56102 (рис. 3). С увеличением времени появления сигнала ( k СИГ = 201 ) относительно момента времени начала фильтрации вероятность d резко снижается для алгоритмов адаптации по входу и по выходу (см. рис. 3).
Таким образом, в условиях рассмотренного примера ПУ с комбинированной адаптацией (рис. 1) обеспечивает быстрый поиск искомого ШПС с более высокой вероятностью правильного одновременного обнаружения и распознавания d (в сравнении с алгоритмами адаптации по входу и по выходу) за время T ПОИСКА , не превышающее длительности периода МЛРП L .
Выводы
Как видно из рис. 2, при известном моменте появления сигнала ( k СИГ = 1 ) самая низкая вероятность правильного обнаружения и распознавания m -значных комбинаций МЛРП свойственна для алгоритма с адаптацией по входу, самая высокая – для алгоритмов с комбинированной адаптацией и адаптацией по выходу.
При неизвестном моменте появления сигнала (рис. 3) (например, сигнал появился на входе ПУ при k СИГ = 201 ) вероятность d будет наибольшей для алгоритма с комбинированной адаптацией и наименьшей – для алгоритмов с адаптацией по выходу и входу.
Результаты анализа показывают (рис. 2, 3), что в случае алгоритма с комбинированной адаптацией вероятность правильного обнаружения d практически не снижается при изменении вероятности ложной тревоги α от 0,1 до 0,001 при различных моментах времени появления сигнала k СИГ на входе ПУ; тогда как в случае алгоритма адаптации по выходу и, особенно, алгоритма адаптации по входу разница в изменении вероятности d при изменении вероятности ложной тревоги α от 0,1 до 0,001 достаточно велика (рис. 3).
Таким образом предложенные алгоритмы адаптивной фильтрации обеспечивают быстрый поиск ШПС за время, не превышающее длительности периода МЛРП в сравнении с известными методами поиска ШПС на корреляторе или согласованными фильтрами, которые при поиске ШПС с большой базой требуют значительных временных или аппаратурных затрат.
Список литературы Адаптивные алгоритмы быстрого поиска многоуровневых шумоподобных сигналов
- Амиантов И. Н. Избранные вопросы статистической теории связи. М.: Сов. радио, 1971. -416с.
- Тихонов В. И. Статистическая радиотехника. М.: Радио и связь, 1982. -624 с.
- Петров Е. П., Прозоров Д. Е. Синтез устройств быстрого поиска шумоподобных сигналов, сформированных на многозначных рекуррентных последовательностях максимального периода//Радиотехника и электроника. Т. 50, № 10, 2005.-С. 1281-1286.
- Прозоров Д. Е., Чащин А. А. Синтез адаптивных устройств быстрого поиска многоуровневых шумоподобных сигналов//Труды XII МНТК «Радиолокация, навигация, связь». Воронеж, Т. 2, 2006. -С. 749-757.
