Agent-based modeling in the formation of an effective territorial network of forest roads

Author: Gulin Konstantin A., Dianov Sergei V., Alferev Dmitrii A., Dianov Daniil S.
Journal: Economic and Social Changes: Facts, Trends, Forecast @volnc-esc-en
Section: Regional economy
Article in issue: 1 т.16, 2023.
Free access
The paper considers conceptual and methodological aspects in creating computer simulation agent-based models which provide decision-making on the formation of an effective territorial network of forest roads. The key aim of the research is to interpret and test a service-oriented approach to building such models. The approach is based on the principle of interaction between the following objects distributed in space: service providers and consumers. We consider issues related to constructing and operating a network of forest roads used for forest harvesting processes. Complexity in solving these problems is due to a large number of interacting elements and estimated parameters that differ in their impact on the system depending on a particular territory. Thus, such problems are solved using simulation modeling methods, in particular, the agent-based approach, which is one of the most promising ones among them. At the same time, it is determined that they are constructed without using a formalized methodological framework, which does not allow us to interpret the results obtained here as a unified concept of formation of agent-based models in the subject area. To fill this niche, we propose our own concept based on the service-oriented approach. We present main fragments of formal description of the approach and describe some aspects of its applied interpretation using a prototype of game agentbased model in AnyLogic environment. We use general scientific methods: formalization, abstraction, generalization; methods of system analysis and agent-based modeling. As a result of the work we developed and tested our own concept of agent-based modeling of effective territorial transport infrastructure of the harvesting system. The novelty of the concept lies in the use of service-oriented approach. In addition, the concept can be used as a universal basis for building the models in question. This will require the development of methodological aspects of its application, a full-scale interpretation of the possible uses, as well as practical testing on real systems.
Harvesting system infrastructure, transport accessibility of forest resources, efficient road network, agent-based modeling, service-oriented approach
Short address: https://sciup.org/147240260
IDR: 147240260 | UDC: 630:330.4 | DOI: 10.15838/esc.2023.1.85.4
Text of the scientific article Agent-based modeling in the formation of an effective territorial network of forest roads
Global consumption of all natural resources is expected to increase from 92 billion tons in 2017 to 190 billion tons in 2060, according to the State of the World’s Forests 2022 report by the UN Food and Agriculture Organization. Consumption of biomass, the largest consumer of which is the forest and wood industry, will increase from 24 billion tons to 44 billion tons1. Sustainably meeting the demand for forest biomass will require an increase in the supply of forest resources. The Russian Federation has enormous forest resources. However, most of the forests grow in harsh climatic conditions; this fact causes high costs of timber harvesting and transportation (Grebenyuk, Garus, 2014). In this connection, the question of the possibility of building an effective territorial infrastructure of the harvesting system is of particular relevance. It is for a reason that the expansion of the forest road network is stated as one of the basic conditions for the transition to the intensive forestry model in the Strategy for the Development of the Forest Sector of the Russian Federation until 2030. According to calculations by the All-Russian Forest Inventory Organization, the development of the estimated logging area requires at least seven kilometers of all types of roads per one thousand hectares of forest area. Now this figure is 2.4 kilometers2. The most significant shortage of roads is observed in the zone of perspective forest development, which causes an unequal degree of technological impact on the forest ecosystem in terms of harvesting wood resources, creating risks of deforestation of some areas and the formation of large areas of overmature forests in others. In this regard, the development of a network of forest roads represents one of the key tasks in improving the efficiency of forest management (Mokhirev et al., 2017).
The functioning of the harvesting sector is ensured by a set of production and transportation facilities. The parameters of the location of facilities, their design and technological solutions determine the costs of logging production, its efficiency and safety (Afonichev et al., 2014). The issue of financial investments in road construction to date remains debatable (Kuryanov, Morkovin, 2009). The profitability of forest road construction is estimated by calculating the optimal density of the road network. Optimization of road network density is reduced to the problem of comparing the costs of timber transportation with the costs of construction (Gerasimov et al., 2009). The search for the optimal option is due to the fact that improving the quality of the road makes it more expensive, but simultaneously reduces the costs of directly transporting timber (Mokhirev et al., 2019). To determine the economic feasibility of constructing timber roads, additional capital investment should be compared with savings in current production costs. These savings are obtained not only on transportation operations. Good roads ensure smooth functioning of all links of logging production, which promotes the maximum use of fixed assets and labor resources and raises the level of its organization. As a result, the cost of timber harvesting is reduced by 20–80% (Pochinkov, 2000). The effectiveness of investment in the construction of new transportation routes can be assessed by the increase in the regional gross domestic product; the effectiveness increases if other natural resources are used in the region along with forests (Yakusheva et al., 2014).
The general task of creating a territorial network of forest roads is formulated as follows: to select the locations and parameters of infrastructure nodes and routes between them, as well as the structure and movement patterns of vehicles of the logging system so as to provide the most cost-effective option for harvesting and transportation of forest resources for a long period, taking into account their effective renewal, from the nodes of forest plots of the territory to infrastructure nodes of primary processing or warehousing. The complexity of this task involves the use of modern tools capable of supporting management decisions in this area. Methodological tools and software developed in foreign countries are not always applicable in Russian naturalproduction and economic conditions. In Russia, the approaches to substantiating the parameters of transportation of wood resources are not yet well developed, and the available Russian scientific works do not solve a whole range of tasks related to the development of national forest transportation potential. This indicates the need to conduct scientific research to improve the transport and economic accessibility of wood resources of the Russian Federation (Mokhirev, Rukomoynikov, 2022) and the relevance of such research works. Agent-based modeling can be used as one of the most promising tools of this kind; in recent years it has been increasingly used in works on the forest complex.
The main purpose of the study is to interpret and test the service-oriented approach to the construction of agent-based models that ensure the formation of an effectively functioning territorial network of forest roads.
New scientific results include the development of our own concept of creating agent-based models using the service-oriented approach to model effective territorial transport infrastructure of the logging system and its practical validation.
Practical significance of the results consists in the development of a methodology for creating agent-based models, providing decision support processes for the formation of a territorial network of forest roads.
Methods
To date, there exist certain studies devoted to individual problems of spatial network formation, such as the location of network nodes, evolution of transport networks, taking into account their use by business entities. Methods that substantiate the search for shortest paths between graph nodes are described in (Bellman, 1958; Dijkstra, 1959; Moore, 1959; Floyd, 1962). They allow analyzing static elements in the operation of enterprises and serve as a basis for the implementation of stationary-dynamic problems of flow programming in the rationalization of flows in transportation systems (Mokhirev et al., 2019). A number of scientific papers present mathematical models aimed at solving the problem of optimizing the structure of the forest sector with a focus on location and accessibility. A.G. Tret’yakov (Tret’yakov, 2019) uses the simplex method of linear programming to solve such problems (Kumar, Kaur, 2010). Mathematical models presented in the works of
I.R. Shegelman (Shegelman, 2001; Shegelman, et al., 2005) are designed to substantiate end-to-end flows of wood harvesting, transportation and processing. Optimization models proposed by B.A. Il’in (Il’in, 1987) allow us to calculate the width of the gravity zone of a temporary road. The solution to the problem of finding the optimal route of timber transportation from the logging site using Dijkstra’s algorithm and dynamic programming method is presented in (Mokhirev et al., 2018). In a scientific publication by E.G. Gladkov (Gladkov, 2005), a mathematical model of logging enterprise functioning is described.
However, the possibilities of practical use of the considered methods are small. Such models, as a rule, are static and are calculated on examples with a small amount of input data. They characterize the possibility of passing only one flow variant through the arcs of each time interval and do not take into account the specifics of the logging industry, which provides for the need for an integrated solution to the problems of developing several logging sites within one time range when substantiating a schedule for the technological process of logging operations (Mokhirev et al., 2019).
Many scientists have investigated the possibility of applying simulation modeling to solve problems related to increasing the efficiency of logging production (Sukhanov et al., 2012; Vasil’ev and Kornyl’eva, 2015; Rukomoynikov et al., 2020; Lim, 2012). Simulation modeling provides a detailed description of the system and allows analyzing its dynamic characteristics (Makarov et al., 2019; Rossoshanskaya, 2019). The available models cover a wide range of tasks in the subject area under consideration: finding optimal timber transportation routes (Sokolov, Osipov, 2017; Komarov et al., 2019), organizing the interaction of truck trains (Nikitin et al., 2016), choosing the type of road to be designed on the transport network section (Mokhirev et al., 2019), organizing transport flows3, optimal timber cargo flow distribution4, synthesis of an optimal logging plan (Gerasimov et al., 2011). The set of methods used is diverse: Petri nets (Sokolov, Osipov, 2017), fuzzy networks (Komarov et al., 2019), Monte Carlo method (Nikitin et al., 2016), mathematical modeling and geoinformatics (Gerasimov et al., 2011; Mokhirev et al., 2017), discrete-event and agentbased modeling (Mokhirev, Rukomoynikov, 2022). Significant opportunities for solving the problem of efficient use of forest resources of territories are provided by agent-based modeling tools (Gulin, Antonov, 2017; Huff et al., 2015). Their significant advantage is the ability to take into account the dynamics of changes in the characteristics of the entities over time and their spatial location, as well as the structure of relationships between the entities under consideration (Arifin, Madey, 2015; Janssen, 2017; Scholz et al., 2017; Holm et al., Fitzpatrick, 2018; Zupko, Rouleau, 2019; Scholz et al., 2021; 2018; Sotnik et al., 2021). The problem is that such models are constructed without using a formalized methodological framework. This does not allow the results obtained here to be interpreted as a unified concept for the formation of agent-based models in this subject area.
As part of the solution to the indicated problem, we developed a concept of agent-based modeling for effective territorial transport infrastructure of the logging system, based on the service-oriented approach (Dianov, 2020). The fundamental element of the concept is a model ( M ) based on the interaction of mobile and stationary services and users. All objects of the model can act in the roles of consumers and service providers. As part of the service delivery process, they must interact either directly or using other model objects. The interaction is carried out in the configuration of the territorial transport network. In the process of service provision the values of a given set of parameters for assessing the success of the model – the target values ( CRP ) are formed. The main purpose of modeling is to find the most optimal architecture for the functioning of the modeled system based on the values of the target indicators with the available resources ( mLim ).
There are the following elements of the model.
-
1. Nodes ( U ) – points in space, where model objects can be located. Each node has its own identifier ( uID ).
-
2. Tracks ( S ) connect nodes. The model objects move along them. They contain the following set of attributes: identifier (sID); connected nodes uID(U1) and uID(U2); type (sT); length (sL); set of state parameters (pS). The set of parameters defines the characteristics of movement along the path of model objects. Examples of such parameters are minimum depth of a waterway, smoothness of a roadway, etc. Each parameter has a name (psNm), a domain (psD) and a value (psV). The domain defines the range of possible parameter values. Tracks can be combined into routes (W={S}).
-
3. Objects (O). They can denote a wide range of various elements of the system being modeled. They have a name (oN), a place of permanent
dislocation in nodes (oConstD), a type (oT). An important object parameter is the mobility type (oTyMob). Its domain contains two values: true and false. When oTyMob=false, the object is stationary. In this case, it cannot move independently (or at all) from the node of its defined dislocation. If oTyMob=true, then the table of characteristics of its mobility (oTabMob) is formed in the parameters of the object. It defines possible types of paths of object movement and average speed of object movement (oSpeed) by each of them: oTabMob = {〈sT, oSpeed〉} . The current dislocation parameter (oCurD) is also defined for this type of objects.
Sets of needs ( O({oNeed}) ) and services provided ( O({oServ}) ) are associated with each object type. At the object level, a set of activated needs ( O({oNeed} A ) ) and services ( O({oServ} A ) ) are maintained at each simulation time. The activated needs contain the names of the needs and the sets of parameters characterizing them: oNeed A (oNeedName j , {oNeedParNm, oNeedParV}). Here, each parameter has a specific value oNeedParV . Activated services contain a mapping of the object Ok, to which a service is provided, and its activated need oNeedtA (Ok), as well as the name of the service provided oServNamep and the place of its provision Um.
Needs and services are processed within the object behavior model. The needs arise from a certain state of the object parameters (oPar). The parameters have a name (oParNm), a domain (oParD) and a value: oPar = 〈oParNm, oParD, oParV〉. A separate needs identification module (oNeedModId) is formed for each need in the object behavior model, where formulas (F) are defined, by means of which the task of identifying each need is solved. The identified needs are placed in the set of activated needs.
In the object behavior model, for each need, the module of its realization is defined. It is divided into two blocks: a block of service search and a block of service access.
When searching for a service provider, objects can use active and passive behavior. In the passive behavior, they either inform the service providers about the existing need and wait for their reaction, or simply wait for the service providers to show interest in them. In the first case, a message containing the name of the author of the message and the activated need is sent to the objects providing the desired service: msgNeedA(oNthls,oNeed A ) . In the second case, the service search block is not defined. A distinctive feature of this type of behavior of objects is their complete passivity in the choice of provider – providers themselves in competition determine which of them will provide a service.
In the case of active behavior, objects independently search for a service provider. The search is associated with selecting the best option for the needs of the object at the current time. For this purpose the fit criterion of service provider selection (CrFS) is defined. It can be both a minimization criterion and a maximization criterion for different choices. When calculating the criterion, the parameters of access paths to the service, the object of the service and the object itself are analyzed:
CrFS =
W i (sT, sL, pS), O j (oTyMob, oTabMob, oConstD, oCurD, oPar),\^CountOS ( \ oTyMob, oTabMob, oConstD, oCurD, oPar /J
;
min/max(CrFS) ^ (OS,US,WS), where OS is the selected service object, U S is the service receiving node, W S is the access route to the service receiving node.
The service search block functioning algorithm includes the following steps: generation of possible interaction routes; calculation of the fit criterion for service provider selection for each route; selection of the fit option; forwarding a message to the selected service providing object, which contains the service receiving object name, demand and service receiving place: msgNeedO(oNthls, oNeedA, Us).
The service access block is defined only for mobile objects. It is used when the node of service providing does not coincide with the node of the current dislocation of the object receiving the service. It is also activated when a message is received from the service object about the node where the service will be provided and the path to it: msgServU(US, WS). According to the defined access route to the service receiving node, the object is moved. The parameters of movement depend on the parameters of the object itself and the parameters of the paths that make up the route. The total time for the passage of the route is determined by the sum of the time spent on the paths, which make up the route. In turn, the travel time is determined based on some functional dependence: ti = F(sL, pS, oSpeed, oPar), where oSpeed is selected from the table of object mobility characteristics oTabMob. The service access block can also define the effects an object has on the parameters of the paths it travels, as well as the change in the parameters of the object after it has traveled the path.
Behavior model for each service providing object contains modules of service identification, service commitment and service provisioning.
Service identification module is used in the cases, when a service providing object carries out an independent search of objects for service provision. The algorithm of its work consists of the following steps: searching in the set of active needs of the object O({oNeed}A); determining the fact of servicing the need; if the fact of servicing the need is not confirmed, the object prepares and sends to its address a message, containing the name of the object, which needs a service, and the activated need: msgNeedA(oN, oNeedA).
The service commitment module receives at its input the messages about the need for a service. Here the problems are solved concerning the service provision possibility and, in case of a positive decision, its parameters. To determine the service provision parameters, a service provision efficiency criterion (CrES) is calculated for all the possible ways of service provision (CountW), taking into account the mobility of interacting objects:
CrES =
Г ^W i (sT,sL,PS),O j (oTyMob, oTabMob, oConstD, oCurD, oPar)A)CountW oTyMob, oTabMob, oConstD, oCurD, oPar
;
min/max(CrES) ^ (US,WS).
After selecting the service provisioning parameters, the object enters into a dialog with other model objects that plan to commit to providing the service under consideration. In this dialog the objects exchange information about the calculated service provision efficiency criteria. According to its results, the object providing the service is selected, which prepares and sends itself a message containing the name of the object of service receipt, the need, the place and the path of service receipt: msgNeedO(oN, oNeed A , US, WS). When the node of service provision does not coincide with the node of the current location of the mobile object of service receipt, it receives a message containing the node and the path of service receipt msgServU(US, WS). At the same time, the corresponding element in the set of activated services of the object is formed.
The service provisioning module is activated when messages with the parameters accepted for processing are received. Here the problems of transfer to the service provision node and the service provision are solved.
The block of moving to the service providing node is defined only for mobile objects. It is used, when a service provisioning node is not the same as the object’s current location. Its content is similar to the service access block that is considered for the objects that implement the needs.
After the block of moving to the service provision node is processed, the block of service provision is activated. The first step in this process is the monitoring of the objects’ location in the node. If this condition is met, the service provisioning process is initiated. The process implies the alteration of the interacting objects’ parameters within a certain period of time. The magnitude of changes at each time step depends on the set of values of the current parameters of the objects: oPar i (O N ) := F (oPar(OS), oPar(ON)} oPar i (OS) := F(oPar(OS),oPar(ON)). The service provisioning stops when certain values in the parameters of the service provisioning object specified in some service parameters are reached: oPari (ON) < oServPar j (OS). After that, the corresponding elements are removed from the sets of activated needs and services of the interacting objects.
Various architectural compositions of the system being modeled are formed in the process of modeling. The number of possible variants is limited by the specifics of the subject area and the constraints of available mLim resources. Further, simulation by each of the variants within a certain simulation time TM is performed. According to the results, the values of model effectiveness indicators (IE) are calculated, which are derived from the values of the model objects’ parameters observed in the course of the modeling: IE i = F((oParO ^ TM}). The set of obtained indicators for each model is compared with the set of target CRP indicators, and the most optimal variant of the architecture of the simulated system is determined.
Results
In order to test the presented concept in its individual aspects, as well as to demonstrate the possibilities of its interpretation, a prototype of the agent-based model of the logging infrastructure has been created. It is not a representation of the real system. At this stage, we did not seek to make the model as close as possible to the subject area. Many elements of the prototype are of demonstration nature. The process of harvesting with the use of motor roads is considered. Cut-to-length logging is used. It is assumed that there are two transportation bases: a logging equipment base and a heavy-duty truck base capable of transporting logging equipment. They are connected by an automobile road. There is a forest plot to which a forest road is laid from the automobile road connecting the transport bases. One harvester is placed on the logging equipment base. In order to simplify the model at this stage it was decided not to simulate forwarder operation. One vehicle is placed on the basis of automotive equipment. A forest massif grows in the forest area. When it matures, the harvesting process begins. A truck is used to transport the harvester to the forest road. The harvester then drives on its own to the forest and begins logging. At the end of logging, the harvester travels to the forest road and is then taken back to the base by the truck. The modeling process takes place over a long period of time, during which several moments of forest maturity occur at the site. The characteristics of the forest road deteriorate as vehicles pass through, which affects the parameters of its passage by vehicles. The purpose of the modeling is to examine the cost-effectiveness of forest road pavement quality. Profitability of logging process acts as a criterion for model evaluation. It depends on the profit received as a result of wood harvesting and the costs incurred in the logging process. A conditional simulation time is used, which is not related to the time of real processes.
A prototype model has been created in Any-Logic. There are four nodes in the model ( Fig. 1 ): node (Carrier Base), the location of heavy-duty vehicles that provide transportation of logging equipment; node1 (Forest Plot), the location of the logging site; node2 (Crossroads), general location where all tracks intersect; and node3 (Forest Equipment Base), the location of logging equipment.
Three path elements were created: path that connects node and node2; path1 that connects node2 and node1; path2 that connects node2 and node3. Path and path2 represent public roads, while path1 represents a forest road. The set of properties of these elements contains a single attribute – Quality – that defines the quality of the road surface. The domain of its values includes real numbers in the range from 0 to 1. In the prototype model this parameter is defined only for path1 element. Based on the specifics of the modeling environment used to work with the parameters of the elements, an agent is created for each of them. In this case, the Way agent is created, containing the quality parameter. This agent has two states (Fig. 2):
Figure 1. Layout of nodes of the prototype model
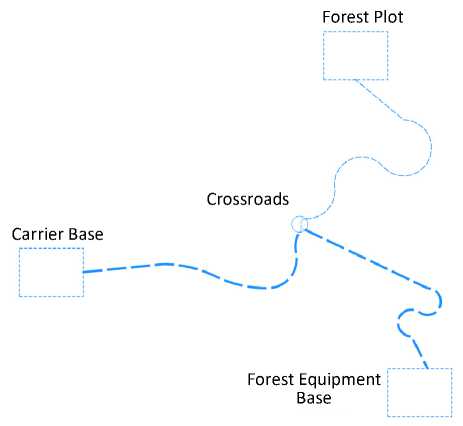
Source: own compilation.
Figure 2. Diagram showing the states of the Way agent
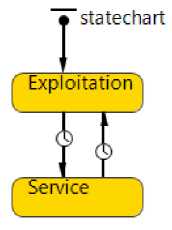
Source: own compilation.
Exploitation and Service. In the Service state, the value of the Quality parameter increases. The transition to this state is carried out according to the set time interval (Service_period).
At the prototype level of the model, the path type attribute is currently not used. It is assumed that the objects available in the model can move strictly along the routes defined for them. Path lengths are also conditional.
Three objects are defined in the model: forest plot, harvester and car transporter. The forest plot is set as stationary. The other two objects are set as mobile. In tables of mobility characteristics of these objects the average speed of their movement is defined. The harvester object can move only on a forest road, and the car transporter object can move only on public roads.
Needs are defined at the level of forest plot and harvester objects. For the first object it is the need for logging, and for the second object it is the need for delivery to the forest road. Services are defined at the level of harvester – logging, and truck – equipment transporting.
The forest plot object has the following parameters: stand age (Age), stand area (Square), stand volume (Volume). At each simulation step, the value of the Volume parameter changes depending on the current values of the Age and Square parameters. The need for felling occurs when the stand reaches a certain age. When searching for a service provider the forest plot object has a passive behavior. It sends a readiness message to the harvester object.
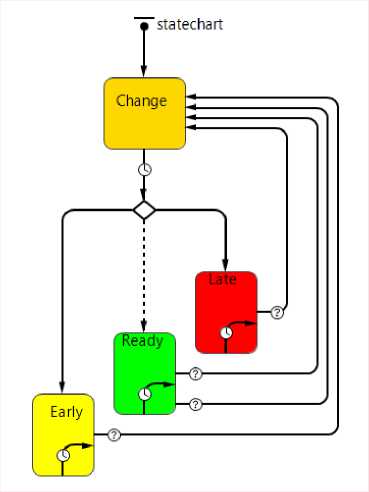
In the simulation environment, the forest plot object is implemented using two agents: Les and Manager. The former generates the values of the object parameters, and the latter monitors the current state of the object and sends a message when the need for harvesting arises. Les agent has three states that characterize the age of the stand ( Fig. 3 ): Early, Ready, and Late, as well as the state of age transition (Change).
Source: own compilation.
Figure 3. Diagram showing the states of Les agent
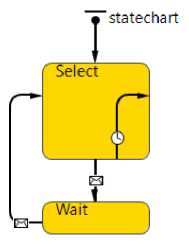
Manager agent can be in two states ( Fig. 4 ): monitoring the state of Les agent (Select) and waiting for the end of the felling service (Wait). While in the Select state, the agent checks the state of Les agent at certain intervals. If the state equals Ready, the agent sends a message to the harvester object about the need for service. After the message is sent, Manager agent enters a Standby state. It stays in this state until it receives a response message from the harvester object about the end of the service.
The Harvester object has a Performance parameter – the amount of forest it can cut in a certain amount of time. When rendering a logging service, it changes the Volume and Age parameters of the forest plot object. At the same time, it increases the value of the parameter of the total harvested volume (Zagotovleno). This parameter is defined on the general model level. The harvester object is implemented in the modeling system in the form of Harvester agent. This agent has many states, which can be arranged into the following groups: waiting for a request to provide logging service; receiving the service of transportation to the forest road; moving by the forest road to the forest plot; providing logging service; moving by the forest road to the public road; receiving transportation service to the forest machinery base. The need for transportation service arises upon receiving a message from the forest plot object about the service request or after the end of the service provision after moving to the public road. The harvester object has a passive behavior when searching for a service provider. In this case, it sends a message to the car transporter object about the availability of the corresponding need. The message parameters contain information about the delivery location.
The car transporter object is implemented as Auto agent. The agent activates the service delivery functionality after receiving a message from the harvester object. It moves the harvester to the node specified in the message. At the same time, it moves to the current location of the harvester in advance. After the service is rendered, Auto agent moves to the node (Carrier Base).
At the level of Harvester and Auto agents, Current_time variables are defined, which record the time of their current operations. The variables Time_harvester and Time_auto, which accumulate the total time spent by Harvester and Auto agents to perform operations, are introduced at the general model level. The variable Service_count is introduced into the model to calculate the number of service operations.
Source: own compilation.
Figure 4. Diagram showing the states of Manager agent
The adjustable parameters in the model prototype are the cost of harvested timber per unit volume (Price_forest); cost of using a truck per unit time (Price_avto); cost of using a harvester per unit time (Price_ harvester); cost of forest road maintenance (Price_service); period of forest road maintenance (Service_period).
Profitability of the logging process is the target indicator for the created prototype of the model. To calculate it we introduce profitability variable into the model. It is updated at each step of model time: profitability = Prtice_forest x Zagotovleno — (Price_harvester x Time_harvester + Price_avto x Time_auto + Service_count x Price_ service).
Using the created prototype model, we conducted a number of experiments ( Fig. 5 ).
The Table shows the results of experiments related to changes in the forest road service period parameter while the other parameters remain unchanged. The total simulation time is 300 model time units.
Figure 5. Window with simulation results
Forest Plot
0auto root-auto
0 harvester root.harvester( Performance = 3.0 )
rootway( quality = 0.20000000000000015 )
0 manager root.manager
Crossroads
О Zagotovleno 213
О Service_count
О Time auto *41.044 О Time harvester
111.867
Carrier Base
Q Priceforest (3 Price_harvester Q Price_avto ^ sot?6- .service Q Service_period
Forest Equipment Base
О profitability * 1,073.312 7
Source: own compilation.
Experiment results
|
No. |
Service period, model time units |
Volume of harvested wood, conventional units of volume |
Profitability, conventional monetary units |
|
1 |
300 |
213 |
1073.312 |
|
2 |
250 |
213 |
773.312 |
|
3 |
200 |
213 |
783.558 |
|
4 |
150 |
213 |
658.366 |
|
5 |
100 |
213 |
381.426 |
|
6 |
50 |
219 |
-419.146 |
|
Source: own compilation. |
|||
According to the results of the simulation, the following facts are noteworthy. The best result, in terms of profitability, was obtained with a service period equal to the model time. At the same time, the worst result in terms of profitability turned out to be the best in terms of the volume of harvested timber. I.e., due to better maintenance of the forest road, the speed of harvester movement along it to the place of harvesting increased. And this, in turn, provided a greater volume of logging during the simulated period.
Discussion
Analyzing the obtained results, in general we can say that the goal of the research has been achieved. Using the practical implementation of the model prototype, we have conducted an interpretation and testing of the service-oriented approach to building agent-based models, which ensures the formation of an effectively functioning territorial network of forest roads. In particular, we have thought out and tested mechanisms to ensure the definition of target indicators and criteria for assessing the performance of the system in the presence of mobile elements; we have designed a spatial graph of the system functioning, taking into account the existing infrastructure, capable of reflecting the mobility of system elements; we have defined the composition and parameters of the system objects in accordance with the service-oriented paradigm; we have defined behavior models of system objects, taking into account their mobility and focus on the provision/consumption of services; distribution of system objects in the nodes of the spatial graph; the possibility of manipulating the parameters of objects and primary distribution of objects in the nodes of the spatial graph. At the same time, it is worth noting that the study did not interpret the mechanisms of formation of competitive behavior of model elements. This is due to the desire to present a simplified version of the prototype model in order to consider it more efficiently. At the next stage of research, we are planning to develop a prototype model on the example of the real system. This will help to eliminate existing gaps in the interpretation of developed approaches to the creation of such a system, as well as to clarify them. Besides, the presented prototype in its current form is not intended for conducting experiments, according to the results of which one can make meaningful conclusions about the system under consideration. The obtained results can be interpreted only in terms of assessing their overall compliance with the simulated processes. At the same time, we should take into account that the created prototype model can be a foundation for building agent-based models of real systems. In developing the prototype, we are planning to take into account many factors affecting the structure of the transport network and the location of its individual component roads in the forest area, including (Ivanova, 2011; Chernyshova et al., 2019) the existing road network; natural and climatic conditions of the area; taxation characteristics of forest stands; relief, soil and hydrological features of the forest resource base area; provision of the area with local road construction materials, location of quarries; duration of winter and summer periods This will enable meaningful and practical interpretation of the modeling results.
Conclusion
Currently, an urgent task for the Russian Federation is to use the enormous potential of available forest resources. At the same time it is necessary to solve the problem of their accessibility, in connection with which it is necessary to plan the formation of the most cost-effective network of transport routes in any project for the development of forests in a certain territory. The long-term nature of investments should also be taken into account. The complexity of the problem lies in the fact that to solve it, it is necessary to work through many possible options, operate with a large set of various parameters, and predict the change in the system over time. We are working on the development of methodology for creating agent-based models, which provide decision-making support for the formation of an effective territorial network of forest roads. The presented research is devoted to eliminating the existing gap in the use of unified concept of formalization of the subject area, which is observed in the creation of such models. The results obtained will help to design a complete mechanism for creating agent-based models, providing a consistent and complete cycle of stages, from the analysis of the subject area to the practical implementation and use of models. They are of practical significance in terms of interpretation of the concept of building agent-based models of forestry infrastructure formation and confirmation of the possibility of building models of real systems with its help, providing their evaluation and decision-making on development.
Thus, the work contributes to the development of theoretical and applied aspects related to creating agent-based models for the formation of an effectively functioning territorial network of forest roads.
References Agent-based modeling in the formation of an effective territorial network of forest roads
- Afonichev D.N., Danilov A.D., Petrovskii V.S. (2014). Mathematical support of the computer-aided design system for industrial and transport infrastructure of the timber industry complex. Lesotekhnicheskii zhurnal=Forestry Engineering Journal, 4(1)(13), 75–80 (in Russian).
- Arifin S.M.N., Madey G.R. (2015). Verification, validation, and replication methods for agent-based modeling and simulation: Lessons learned the hard way! In: Yilmaz L. (Ed.). Concepts and Methodologies for Modeling and Simulation. Simulation Foundations, Methods and Applications. Available at: https://doi.org/10.1007/978-3-319-15096-3_10
- Bellman R. (1958). On a routing problem. Quarterly of Applied Mathematics, 16, 87–90. DOI: 10.1090/qam/102435
- Chernyshova E.V., Skrypnikov A.V., Samtsov V.V., Abasov M.A. (2019). Logging roads in a transportation network of a forest industrial enterprise. Lesnoi zhurnal=Russian Forestry Journal, 2, 95–101. DOI: 10.17238/issn0536-1036.2019.2.95 (in Russian).
- Dianov S.V. (2020). The problem of optimal spatial placement of services for systems with mobile users. In: Intellektual'no-informatsionnye tekhnologii i intellektual'nyi biznes (INFOS-2020): mat-ly XI zaochnoi mezhdunar. nauch-tekhn. konferentsii, Vologda, 29–30 iyunya 2020 goda [Intellectual and Information Technologies and Intellectual Business (INFOS-2020): Proceedings of the 11th Correspondence International Scientific and Technological Conference, Vologda, June 29–30, 2020]. Vologda: Vologodskii gosudarstvennyi universitet (in Russian).
- Dijkstra E.W. (1959). A note on two problems in connection with graphs. Numerische Mathematik, 1, 269–271.
- Fitzpatrick B.G. (2018). Issues in reproducible simulation research. Bull Math Biol. Available at: https://doi.org/10.1007/s11538-018-0496-1
- Floyd R.W. (1962). Algorithm 97 – shortest path. Comm. of ACM, 5, 345.
- Gerasimov Yu.Yu., Karvinen S., Syunev V.S., Sokolov A.P., Katarov V.K. (2009). Development of transport infrastructure of the forest industry – experience of Finland. Transportnoe delo Rossii=Transport Business of Russia, 7, 99–102 (in Russian).
- Gerasimov Yu.Yu., Sokolov A.P., Katarov V.K. (2011). Elaboration of a logistic system for industrial wood harvesting and transportation. Informatsionnye tekhnologii=Information Technologies, 1(68), 39–43 (in Russian).
- Gladkov E.G. (2005). Model of territorial dynamics of forest-harvesting company. Lesnoi zhurnal=Russian Forestry Journal, 1-2, 47–53 (in Russian).
- Grebenyuk A.L., Garus I.A (2014). The problem of availability of forest resources. In: Aktual'nye problemy lesnogo kompleksa: sb. nauch. trudov po itogam mezhdunar. nauch.-tekhn. konferentsii. Vyp. 39 [Topical Issues of the Forest Complex: Proceedings of an International Science and Technology Conference. Issue 39]. Bryansk: BGITA (in Russian).
- Gulin K.A., Antonov M.B. (2017). Theoretical aspects of agent-based modeling in the development of the forest complex. Ekonomicheskie i sotsial'nye peremeny: fakty, tendentsii, prognoz=Economic and Social Changes: Facts, Trends, Forecast, 10(6), 59–74. DOI: 10.15838/esc.2017.6.54.4 (in Russian).
- Holm S., Hilty L.M., Lemm R., Thees O. (2018). Empirical validation of an agent-based model of wood markets in Switzerland. PLoS ONE, 13(1): e0190605. Available at: https://doi.org/10.1371/journal.pone.0190605
- Huff E.S., Leahy J.E., Hiebeler D. et al. (2015). An agent-based model of private woodland owner management behavior using social interactions, information flow, and peer-to-peer networks. PLoS ONE, 10(11): e0142453. Available at: https://doi.org/10.1371/journal.pone.0142453
- Il'in B.A. (1987). Osnovy razmeshcheniya lesovoznykh dorog v syr'evykh bazakh lesozagotovitel'nykh predpriyatii [Fundamentals of the Placement of Logging Roads in the Raw Material Bases of Logging Enterprises]. Leningrad: LTA.
- Ivanova M.E. (2011). Forest transportation network management. Planning and research. Lesnoi vestnik=Forestry Bulletin, 3, 91–97 (in Russian).
- Janssen M.A. (2017). The practice of archiving model code of agent-based models. J Artif Soc Social Simul. Available at: https://doi.org/10.18564/jasss.3317
- Komarov K.A., Fomina V.Yu., Gerasimova M.M., Mokhirev A.P. (2019). Optimization of wood delivery routes based on a fuzzy dynamic transport network. In: Bezrukikh Yu.A., Mel'nikova E.V. (Eds.). Innovatsii v khimiko-lesnom komplekse: tendentsii i perspektivy razvitiya: Materialy Vseros. nauch.-prakt. konf. s mezhdunar. uchastiem, Krasnoyarsk, 25–26 aprelya 2018 goda [Innovations in the Chemical-Forestry Complex: Trends and Prospects of Development: Proceedings of an All-Russian Research-to-Practice Conference with International Participation, Krasnoyarsk, April 25–26, 2018]. Krasnoyarsk: Sibirskii gosudarstvennyi universitet nauki i tekhnologii imeni akademika M.F. Reshetneva (in Russian).
- Kumar A., Kaur M. (2010). A fuzzy linear programming approach to solve fuzzy maximal flow problems. International Journal of Physical and Mathematical Sciences, 1(1), 6–12.
- Kur'yanov V.K., Morkovin V.A. (2009). Ensuring the efficiency of the development of economically accessible forest resources through road construction in the context of forest legislation reform. Vestnik Tambovskogo universiteta. Seriya: Gumanitarnye nauki=Tambov University Review. Series: Humanities, 1, 330–333 (in Russian).
- Lim E.W.C. (2012). Discrete Event Simulations: Development and Applications. Rijeka: InTech.
- Makarov V.L., Bakhtizin A.R., Sushko E.D., Sushko G.B. (2019). Agent-based supercomputer demographic model of Russia: approbation analysis. Ekonomicheskie i sotsial'nye peremeny: fakty, tendentsii, prognoz=Economic and Social Changes: Facts, Trends, Forecast, 12(6), 74–90. DOI: 10.15838/esc.2019.6.66.4 (in Russian).
- Mokhirev A., Gerasimova M., Pozdnyakova M. (2019). Finding the optimal route of wood transportation. IOP Conference Series: Earth and Environmental Science, 226, conference 1, 1–7. DOI: 10.1088/1755-1315/226/1/012053
- Mokhirev A.P., Gerasimova M.M., Medvedev S.O. (2018). Finding route of the minimal cost of the transport path when delivering wood from the cutting area. Vestnik SGUGiT=Vestnik of the Siberian State University of Geosystems and Technologies, 23(4), 249–261 (in Russian).
- Mokhirev A.P., Pozdnyakova M.O., Guden' T.S., Sukhinin V.D. (2019). Influence of natural and industrial factors on the transport costs of forestry production industry. Lesotekhnicheskii zhurnal=Forestry Engineering Journal, 9(2)(34), 107–117 (in Russian).
- Mokhirev A.P., Pozdnyakova M.O., Rezinkin S.Yu., Mammatov V.O. (2017). Estimation of the availability of forest resources with the use of modern techniques on the basis of geographical information and analytical systems. Lesotekhnicheskii zhurnal=Forestry Engineering Journal, 4, 109–122 (in Russian).
- Mokhirev A.P., Rukomoinikov K.P. (2022). Modelirovanie struktury lesotransportnykh potokov [Modeling the Structure of Forest Transport Flows]. Yoshkar-Ola: Povolzhskii gosudarstvennyi tekhnologicheskii universitet.
- Moore E.F. (1959). The shortest path through a maze. In: Proceedings of an International Symposium on the Theory of Switching, Aptil 2–5, 1957, Part II. Cambridge, MA: Harvard University Press.
- Nikitin V.V., Kozlov V.G., Arutyunyan A.Yu., Umarov M.M. (2016) Simulation modeling of hauling road function. Vestnik Moskovskogo gosudarstvennogo universiteta lesa – Lesnoi vestnik=Forestry Bulletin, 20(2), 167–172 (in Russian).
- Pochinkov S.V. (2000). Market model of forest management: economic aspects. Lesnoe khozyaistvo, 1, 18–24 (in Russian).
- Rossoshanskaya E.A. (2019). Integrated agent-based model of labor potential reproduction of a municipal formation. Ekonomicheskie i sotsial'nye peremeny: fakty, tendentsii, prognoz=Economic and Social Changes: Facts, Trends, Forecast, 12(1), 124–137. DOI: 10.15838/esc.2019.1.61 (in Russian).
- Rukomoynikov K.P., Mokhirev A.P., Medvedev S.O., Derbeneva E.Yu. (2020). Some features of simulation of the wood removal process. Nauka i biznes: puti razvitiya, 10(112), 104–107 (in Russian).
- Scholz J., Breitwieser F., Mandl P. (2017). Modelling a dynamic forest fuelmarket focusing on wood chips: A spatial agent-based approach to simulate competition among heating plants in the Province of Carinthia, Austria. GI_Forum, 5(1), 383–396. Available at: https://doi.org/10.1553/giscience2017_01_s383
- Scholz J., Breitwieser F., Mandl P. (2021). Simulating the forest fuel market as a socio-ecological system with spatial agent-based methods: A case study in Carinthia, Austria. Natural Resource Modeling. Available at: https://doi.org/10.1111/nrm.12291
- Shegelman I.R. (2001). Analysis of end-to-end processes of harvesting tree biomass and its processing into wood chips. In: Current Issues of Timber Industry Development: Scientific Works. Petrozavodsk: Karel’skaya regional’naya inzhenernaya akademiya Publ.
- Shegelman I.R., Shchegoleva L.V., Ponomarev A.Yu. (2005). Mathematical model of the choice of through flows of procurement, transportation and processing of wood raw materials. Izvestia Sankt-Peterburgskoj Lesotekhnicheskoj Akademii=News of the Saint Petersburg State Forest Technical Academy, 172, 32–37.
- Sokolov A.P., Osipov E.V. (2017). Simulation of the production process of timber harvesting with the help of Petri nets. Lesotekhnicheskii zhurnal=Forestry Engineering Journal, 7(3)(27), 307–314 (in Russian).
- Sotnik G., Cassell B.A., Duveneck M.J., Scheller R.M. (2021). A new agent-based model provides insight into assumptions in modeling forest management under deep uncertainty. Landscape Ecology, 37, 1251–1269. Available at: https://doi.org/10.1007/s10980-021-01324-5
- Sukhanov Yu.V., Seliverstov A.A., Sokolov A.P., Perskii S.N. (2012). Simulation model of forwarder skidding operation: Algorithms and implementation. Trudy lesoinzhenernogo fakul'teta PetrGU=Research Reports of Forest Engineering Faculty of Petrozavodsk State University, 9(1), 58–61 (in Russian).
- Tret'yakov A.G. (2019). Modelling the structure and production volumes of the forest sector in forest planning. Ekonomicheskie nauki=Economic Sciences, 181, 336–342. DOI 10.14451/1.181.336 (in Russian).
- Vasil'ev O.I., Kornyl'eva Yu.A. (2015). Simulation modeling of forest infrastructure management systems. Lesotekhnicheskii zhurnal=Forestry Engineering Journal, 5(2)(18), 177–187 (in Russian).
- Yakusheva T.V., Borozna A.A., Vetrov L.S., Naskovets M.T. (2014). Ecological, economic and social aspects in the development of forest transport infrastructure. Trudy BGTU. No. 2. Lesnaya i derevoobrabatyvayushchaya promyshlennost', 2(166), 63–65 (in Russian).
- Zupko R., Rouleau M. (2019). ForestSim: Spatially explicit agent-based modeling of non-industrial forest owner policies. SoftwareX, 9, 117–125. Available at: https://doi.org/10.1016/j.softx.2019.01.008
