Агрегирование системы гидроакустического мониторинга

Автор: Стародубцев П.А., Сторожок Е.А., Алифанов Р.Н.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 2 т.13, 2020 года.
Бесплатный доступ
В настоящее время возросла угроза диверсий на гидротехнических сооружениях (мосты, плотины, буровые вышки и т.п.). В связи с этим создание эффективных систем гидроакустического мониторинга является актуальной задачей. Агрегирование (от лат. agrego) - объединение отдельных элементов в одно целое. Применительно к рассматриваемой проблеме этим термином обозначается объединение ряда состояний объекта или, точнее, группы объектов, обладающих теми или иными общими свойствами. В статье представлен метод агрегирования с использованием единого критерия, характеризующего минимум потерь информации.
Система гидроакустического мониторинга, степень достижения цели, кортеж, оператор агрегирования системы, функция принадлежности, информационные потери
Короткий адрес: https://sciup.org/146281587
IDR: 146281587 | УДК: 621.396 | DOI: 10.17516/1999-494X-0217
Aggregation of hydroacoustic monitoring system
Currently, the threat of sabotage at hydraulic structures such as bridges, dams, oil rigs, etc. has increased. In this regard, the creation of effective hydroacoustic monitoring systems is an urgent task. Aggregation (from Latin: аgrego) means a combination of individual elements into a single entity. In relation to the problem considered, this term refers to the combination of states of an object or, more precisely, a group of objects that possess common properties. The article presents an aggregation method using a single criterion which characterizes the minimum of information loss.
Текст научной статьи Агрегирование системы гидроакустического мониторинга
Цитирование: Стародубцев, П.А. Агрегирование системы гидроакустического мониторинга / П.А. Стародубцев, Е.А. Сторожок, Р.Н. Алифанов // Журн. Сиб. федер. ун-та. Техника и технологии, 2020. 13(2). С. 206-212. DOI: 10.17516/1999-494X-0217
Проблема агрегирования системы гидроакустического мониторинга является сложной слабоструктурированной проблемой, решение которой требует учета множества факторов в условиях не поддающейся структуризации неопределенности. Причем неопределенность существует как в отношении среды, в которой система гидроакустического мониторинга должна функционировать, так и в отношении параметров системы и характеристик компонентов. По сути своей она относится к классу задач принятия решений в нечеткой обстановке. Разрешение неопределенности обуславливается возникновением проблемной ситуации, в которой имеются два состояния – существующее и желаемое, причем существует несколько способов достижения желаемого состояния. Принципиальная трудность выбора в подобных условиях заключается в неопределенности понятия «наилучший альтернативный вариант» [1, 2].
В основе формирования представления и выбора «наилучшего альтернативного варианта» принятия решения лежит процесс формулирования обоснования, структуризации и формализации цели. Цель при агрегировании сложных систем вначале возникает в виде некоторого «образа» или «области». В наибольшей степени это проявляется на уровне глобальной цели. При этом достичь единого понимания области цели принципиально невозможно без ее детализации в виде неупорядоченного или упорядоченного (в структуре) набора одновременно возникающих взаимосвязанных подцелей, которые делают ее более конкретной и понятной. Сказанное позволяет сделать вывод о том, что задача формирования обобщающей цели в сложных системах не только может, но и должна сводиться к задаче ее структуризации и формализации [3]. В основу представленного ниже материала положена гипотеза о возможности агрегирования этих компонентов с использованием единого показателя и критерия, характеризующего степень достижения цели.
Для структуризации и формализации подобного интегрального показателя уместно привести известный обобщенный подход формализации цели [3, 4]. Формализованные цели могут быть четкими и размытыми. Если они имеют четкую область и четкую границу, то это означает, что вся область цели равнозначна и соответствует оптимальному функционированию, а переход за ее границу вызывает качественный скачок – цель не достигается. В системе гидроакустического мониторинга, относящейся к классу больших и сложных систем, цель функционирования имеет нечеткий, размытый характер, и эту размытость можно объяснить тем, что помимо области полного достижения и полного недостижения цели существует еще область ее частичного достижения. Кроме того, в отдельных случаях внутри области полного достижения цели могут существовать подобласти «перевыполнения» цели.
В общем случае (рис. 1) цель может задаваться в некотором n -мерном пространстве существенных параметров x 1 , x 2 , … , x n [3, 4]. Идеальная точечная цель в этом пространстве опреде- – 207 –
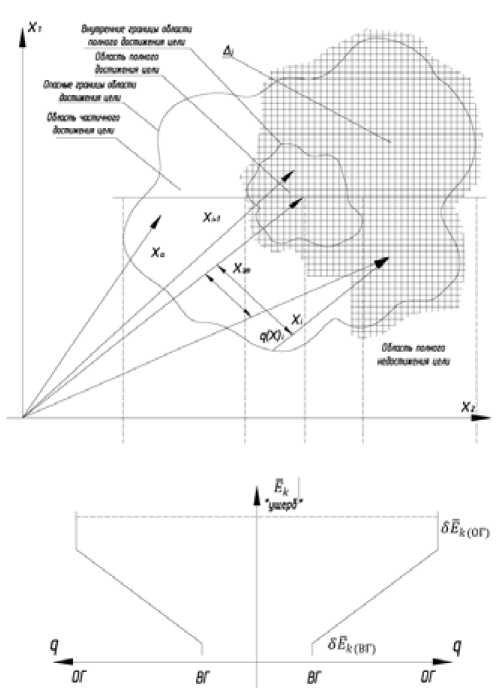
Рис. 1. Формализация цели
Fig. 1. Formalization of the target ляется концом вектора цели xn. Будем считать, что вся область цели характеризуется внешними «опасными» границам и (ОГ ) ξ(xОГ) и «в нутренни ми » гра ницами ( ВГ) ξ(xВГ) . Зa пределами ОГ цел ь по лн остью не дост игается. В пред елах ВГ с д опустимой точно стью це ль пол ност ью достигаетс^я. Между в нешними «опасными » и « внутр енними» границами существует область частичного достижения цели.
Наличие области частичного достижения цели является следствием широкого спектра факторов неопределенности и риска.
Опасные границы области цели имеют размытый характер, и поэтому их можно считать услов но опасным и. Вых^од за их пределы означает нарушение штатного функционирования системы, убыточность ее работы, отставание от- программы функционирования, но все это еще не катастрофа.
В пространстве выделенных существенных параметров всю область цели обозначим V ОЦ, а область полного достижения цели – V ПЦ.
При разбиении этих областей на дискреты Δ j и их подсчете получим соответственно числа N ОЦ и N ПЦ, которые характеризуют мощность множества всей области цели М ОЦ и мощность множества полного достижения цели М ПЦ.
Очевидно, что М Пц = М О ц и все элементы А, е М Оц, а множество частичного достижения цели определ и тся ка к М ^ ЧЦ = М ^ ОЦ – М ПЦ и его мощно сть как N ЧЦ = N ^ОЦ – N ^ПЦ. При N ПЦ → N ОЦ, т.е. при N Чц ^ 0, «опасные и «внутренние» границы области цели сливаются, и цель становится четкой.
Разбив о бласть цел и на эле менты, будем считать, что ес ли вектор о находится в каком-либо элемен те А, е М пц, то цель полностью достигнут а. Если вектор о находится в элементе А, е М Чц, то будет отмечаться некоторое недостижение цели.
В общем случае степень достижения цели Ук опре деляется как функция удаленности i-го элемента (о,), в кото ром находится вектор о i, от внут р енней границы области цели
У ki = ф[q i — ^ ( х Bi-i )], (1)
где ф - фу нкция связи 1м ежду Уд и удаленностью i-го элемента от В Г в пространстве параметров области цели.
По характеру соотнесения координат конца вектор)а о, с ^( х вп) можно определить абсолютную, относительную и степенную виды степени до™™ цели [3].
При век торном представлении степень, достижения цели в n-мерном пространстве характеризуется модулем У и совокупностью полярных- углов {ai}, i= 1, 2, ..., n, где n - размерность пространства цели.
Для практических расчетов удобно представить степень достижения цели в диапазоне [0,1] как меру риличия „араметров в отвоше,™ ик эталонов:
где х э у - эта .лонное значение j-го параметра цели; n - размерность пространства цели, ф - функ-„и. связи между у kj и значениями в ар а метров обл, сти цели [3,4].
Та ким образом, с учетом ориентации на достижение минимума потерь при агрегировании, что в с вою очередь позволяет использовать его значение в качестве обратной связи при формировании и реконфигурации системы-, а так же с учет ом пр) иведенного под хода формализации целей при агрегирован ии пр едлагае тся пр едставлять ин тегральный пок азатель степенью не.до -стиж™ целей в ди™не [0,1].
В условиях неопределенности процесс принятия решения при агрегировании системы описывается кортежем
(F,S ° ,RJ,D, (3)
j AJ гд е F – мно же ство по казате лей , харак^т е ри з у ющ и х сис те му ; S° – мн ожес тво и сходны х ко мпо-нентов для ее построения; R0 - множество действий разработчика или оператора агрегирования системы, R° = (A°,S), а° е А0 - действие, множество действий оператора по выбору компонентов; l- функция, характеризующая потери при формировании облика системы, когда на Отношении FXR° действием а° J- А0 выбираетсяf е F [3, 5].
Не^четкое де йств ие а° ∈ А0 и меет функци ю при надлеж ности µ A : A 0 → [0,1], а нечеткая стратегия построения к " описывается нечетким отношением, характеризующим вари анты выбора о ператором построения исх (-диых к ом и онентов S 0 х д!0, и имеет функцию принадлеж -ности
µRa : S 0 × A 0 → [0,1].
Цель задачи выбора заключается в поиске стратегии построения, которая минимизирует нечеткую функцию потерь
µRa : F × R 0 → min l . (4)
Таким образом, в качестве целевой функции при решении задачи агрегирования системы гидроакустического мониторинга (выбора варианта построения) как информационной системы логично выбрать функцию, характеризующую информационные потери, а в качестве критерия решения – ее минимум.
Отработанная практика построения систем гидроакустического мониторинга базируется на использовании методов интерактивного моделирования для формирования наиболее предпочтительного варианта размещения на местности элементов системы.
Для обеспечения сравнимости результатов оценки плодотворным подходом является подход, опирающийся на гипотезу о возможности формирования интегрального показателя, позволяющего осуществить целенаправленное ее построение как при математическом моделировании, так и при построении в местах применения по предназначению и при ее функционировании.
Пусть S – перспективная интегрированная система гидроакустического мониторинга и абстрактная ее модель описывается соотношением
S = {R × P × O}.(5)
Тогда цель функционирования G можно описать соотношением
G : {M × U} × {R × P × O} = Xr.(6)
Представим ее отображение на временном континууме Т следующим соотношением:
FK : X × {R × P × O} × T × К,(7)
где К ∈ F – показатель эффективности; R = Rg × ( Rs × S ) – оператор системы, Rs =( AF , RF ) – множество функционала элемента системы, причем AF – множество автоматизированных задач, a RF – множество отношений между задачами; Р, О – множества ресурсов и организационнотехнических объектов системы гидроакустического мониторинга; Т = tK – tH – временной интервал.
Допустим, что возможности аппаратных компонентов и множество ресурсов системы гидроакустического мониторинга обеспечивают полную реализацию заданного функционала и соответствующее отображение обстановки. Цель функционирования системы достигается, если обеспечивается адекватное отображение подводной обстановки – взаимно-однозначное соответствие входного и выходно^го инфор ма ционных о бъектов
X ⇔ XR. (8)
Это соответствует услови ю
{X n X r } U {X n X r } = 0, X r ^X , (9)
где чертой сверху XR, X обозначено логическое отрицание «не X, не XR».
В реаль ных услови ях с истем а гидроаку стическо го монитор инга до^лжна о бе спечить мак^-сим ум количест ва элементо в мн ож^еств а подводной о бст ановки, инф ормация о ко то рых в те че -ние определенного времени получена (подве рглась ото бражению и преобразован ию оператором R) или миним изировать мно^же ство элементов, оста вш ихся без во зде йс твия:
card {X nXR } U { X A X r } = cardX, , ^ min , (10)
. ^
где
X
i
, cardX
i
- подмножество информационных потерь в системе
X
i
К по^дмножеству инфор мац ионных поте р ь отнесем потер янн ую в ход е сбора и о бработки, ложную и дублирующую информацию.
Этим показателем, колич ес тв енно характ еризу ющим инф о^рмационные потер и при о то-бра жении, пр ео бразовании вход ного информац и онного объекта в выходной, предлаг ается оценив ать ее эффектив ность. Мини му м и нформ ационн ых поте ^ рь обеспечива ется пр и пос тро ен и и наиболее эффективной системы , по это му крит ерием м инимума и нформац ионных пот ер ь мож^-но оценивать степень достиж^ ени я цели при агрегировании системы [6].
Таким образом, для повыше ния эффек^тивно сти системы г идроакустическог о монитори нга с ограниченным и ресурсами при ее формирова нии необход имо выбирать с тратегию А0* , обеспечива^ющую до стижени е ми нимума информац ионных потерь:
A*:G ■ K = minl(S/F,R,p,A°,Q*) ,
„, зад, где 1 - информационные ротери; F - множество иоказатедей качеств а; А0 - множество стратегий построения; P, Рзад - множество показателей, характеризующих требуемые и заданные ресурсы системы; Q* – подмножество состояний среды, в которую погружена с истема.
По своей сути поставленн ая задача фо^рмирова^н ия системы гидроакустич еского мониторинга из компонентов предста вляет соб ой перехо^д от ф ункции многих переменны х к фун кц ии ил и совокупност и функц и й меньшего ч исла переменн ых, т.е. относится к классу задач аг региро вания. Ос новные пр облем ы аг регировани я св язаны с о преде ле ни ем усл о вий, при кот оры х можно избежать потерь и нфо рмации.
Показатель информ ационны х п оте рь облада ет свой ствами ф изич ес кого и ф унк циональ-но го пока зателя . Он может р ассч и тывать ся с исп ользовани ем результа^тов не посредственны х измер ени й, полученных , например, в те ст овом режим е, поз воляе т лок ализоват ь э^лементы си -стемы, на которых происходят недопустимые потери. Этот показатель дает возмозность оце-н ивать вклад информа ц ионной си стемы в над систе м у и, от^ражая ст епен ь недостиже ни я цели, может использ оваться в кач естве обрат ной связи при ад аптации с ис темы к состояни ю среды. Кром е того, с формирова нный на его основе кри терий минимума информационных потерь позволяет вполне целенаправленно проводить построение информационной системы в условиях неопределенности и обеспечивает сравнимость результатов оценки эффективности системы, полученных в ходе моделирования и применения по назначению [6].
Список литературы Агрегирование системы гидроакустического мониторинга
- Оптнер С.А. Системный анализ для решения деловых и промышленных проблем. М.: Сов. радио, 1969. 215 с.
- Гафт М.Г. Принятие решений при многих критериях. М.: Знание, 1979. 520 с.
- Андреев Г.И., Волчихин В.И., Миронов В.А., Тихомиров В.А. Основы управления предприятием. Т. 1. Современные взгляды на управление предприятием. М.: Финансы и статистика, 2004. 400 с.
- Mesarovic M., Takahara Ya. General Systems Theory: Mathematical Foundations, Moskva, Mir, 1978, 311 p.
- Аверкин А.Н., Батыршин И.З., Блишун А.Ф., Силов В.Б., Тарасов В.Б. Нечеткие множества в моделях управления и искусственного интеллекта. М.: Наука, 1986. 312 с.
- Аксенов О.Ю., Кобан А.Я., Мельник Д.И., Семенов С.А, Семенов В.С. Агрегирование радиолокационных систем и информации о воздушно-космической обстановке. Монография. М.: Знание, 2018. 224 с.
