Аэромобильные устройства в технологиях пастбищного животноводства

Автор: Башилов Алексей Михайлович, Королев Владимир Александрович
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Технологии, машины и оборудование для агропромышленного комплекса
Статья в выпуске: 1 (61), 2023 года.
Бесплатный доступ
Для отрасли пастбищного, стойлово-пастбищного (лагерного) животноводства характерно непосредственное взаимодействие с самоорганизующимися мобильными объектами природного происхождения - животными, перемещающимися по территории обитания или пастбищ. Реализуемые здесь различные по характеру, месту и времени выполнения технологические процессы требуют оперативной адаптации к постоянно меняющимся условиям, оценки состояния животных, управления их характеристиками. Для систем содержания животных, независимо от внутриотраслевой специализации и специфики завершения производственных стадий, весьма важна проблема дистанционного обнаружения и контроля перемещения животного, оценки и контроля его поведения, диагностирования состояния, лечения и т.п. Выполнение некоторых технологических операций и воздействий может являться причиной стресса, испуга, непредсказуемых реакций и поведения животных. Представляют интерес детальная проработка таких операций, специальная настройка и доводка устройств их выполнения. В большинстве случаев задачи технологий управления стадом эффективно решает группа роботов беспилотных летательных аппаратов (БПЛА) и вспомогательное оборудование, дислоцируемые в зоне пастбища. В статье рассмотрены специфичные агротехнологические операции пастбищного и отгонного животноводства на больших территориях. К таким операциям следует отнести наблюдение за поведением животных в стаде, обездвиживание, диагностирование здоровья, лечение животных и т.п. При мониторинге территории выпаса система сетецентрического управления БПЛА формирует актуальную карту контролируемой местности, распознаёт вид животного, оценивает его биометрические характеристики, вычисляет координаты заболевших особей. При необходимости конкретизируют процедуру лечения и с помощью БПЛА реализуют её. Рассмотренные методологические и алгоритмические особенности выполнения операций могут быть использованы в других технологических процессах животноводства.
Пастбищное животноводство, животное, управление стадом, беспилотный летательный аппарат, видеомониторинг, управление
Короткий адрес: https://sciup.org/140297303
IDR: 140297303 | УДК: 631.171 | DOI: 10.55618/20756704_2023_16_1_54-65
Airmobile devices in technologies for pasture animal farming
The branch of pastoral stockbreeding, stallpasture (camp) animal husbandry is characterized by direct interaction with selforganizing mobile objects of natural origin - animals moving through the habitat or pastures. The technological processes implemented here, which are different in nature, place and time of execution, require operational adaptation to constantly changing conditions, assessment of the state of animals, control of their characteristics. Livestock housing systems, regardless of the intraindustry specialization and the specifics of the completion of production stages, identify the problem of remote detection and track of the movement of an animal, assessment and control of its behavior, diagnosing a condition, treatment, etc. The performance of some technological operations and influences can cause stress, fear, unpredictable reactions and behavior of animals. The detailed study of such operations is of interest, special setting and finetuning of the devices for their implementation. In most cases, the tasks of herd management technologies are effectively solved by a group of unmanned aerial vehicle (UAV) robots and auxiliary equipment deployed in the area of pasturage. The article deals with the specific agrotechnological operations of pasture and distant pasture livestock farming in large areas. Such operations include monitoring the behavior of animals in the herd, immobilization, diagnosing health, treating animals, etc. When monitoring the grazing area, the UAV networkcentric control system generates an uptodate map of the controlled area, recognizes the type of animal, evaluates its biometric characteristics, and calculates the coordinates of diseased individuals. If necessary, they specify the treatment procedure and implement it with the help of the UAV. The considered methodological and algorithmic features of performing operations can be used in other technological processes of animal husbandry.
Текст научной статьи Аэромобильные устройства в технологиях пастбищного животноводства
Введение. Концепции перспективных технологий ключевых отраслей сельского хозяйства в ходе их реализации предусматривают мониторинг пространственно-временной изменчивости факторов внешней среды и параметров технологических процессов. Для подобных задач рационально применение современных сенсорных устройств и систем управления, устраняющих обнаруживаемые отклонения параметров аграрного производства от требуемых. Экономически эффективно использовать беспилотные роботизированные мобильные устройства наземного либо воздушного базирования.
В отличие от промышленных систем с регулярно повторяющимся выполнением жёстко регламентируемого перечня технологических операций, производство агро- продукции требует выполнения большого числа различных по характеру, месту и времени технологических процессов, адаптированных к условиям реализации. Ряд из этих процессов требует постоянного непосредственного взаимодействия с непрерывно изменяющимся самоорганизующимся объектом природного происхождения – объектом аграрного производства (ОАП), оценки его состояния, управления его характеристиками. Эти процессы и высокоэффективные технологии реализуемы при наличии и постоянном совершенствовании функционально полных для конкретных условий реализации систем и устройств управленческого и исполнительного уровней.
Для отрасли животноводства особенности общения с ОАП связаны с мобильностью животных (перемещением по террито- рии обитания или пастбища). Для пастбищной, стойлово-пастбищной (лагерной) систем содержания животных, независимо от внутриотраслевой специализации и специфики завершения производственных стадий, весьма важна проблема дистанционного обнаружения и контроля перемещения животного, оценки и контроля его поведения, диагностирования состояния, лечения и т.п.
Выполнение некоторых технологических операций и воздействий может являться причиной стресса, испуга, непредсказуемых реакций и поведения животных. Представляют интерес детальная проработка таких операций, специальная настройка и доводка устройств их выполнения.
В статье рассмотрены некоторые агро-технологические операции пастбищного и отгонного животноводства, реализация которых специфична и может сопровождаться дискомфортом для животных, содержащихся на больших территориях. К таким операциям следует отнести контроль поведения животных в стаде, диагностирование здоровья и лечение животных, управление и сопровождение процессами половой охоты и др.
Рассмотренные методологические и алгоритмические особенности выполнения роботизированных операций могут быть использованы в других технологических процессах животноводства.
Материалы и методы исследования. Производство агропродукции включает реализацию циклов технологических операций, различающихся по месту и времени выполнения, исполнительным машинам и условиям реализации процессов. Из-за взаимодействия с непрерывно изменяющимся самоорганизующимся природным ОАП, в нестабильных условиях внешней среды, высокая эффективность агротехнологий достигается за счёт функционально полных, адаптивных к условиям реализации, систем управленческого и исполнительского уровней.
В общем случае целевая функция агротехнологий ЦФ = Si ЦФПП, где ЦФП - целевая функция n-ного цикла технологических операций (ЦФПП е ЦФ), достигает наилучшего значения при условии высокой эффективности каждого отдельного цикла (тахЦФ и тахЦФПп). Для достижения данного результата целесообразна детальная проработка циклов, часто и отдельных операций, настройка и доводка устройств и их функционирование с учётом условий реализации.
К настоящему времени в агропромышленной сфере выполнено много исследований по дистанционному мониторингу территорий различной площади, например: для анализа пространственно-временной изменчивости и многолетней динамики показателя NDVI пастбищ, по обоснованию периодов оптимального использования пастбищных участков, при оценке питательной ценности пастбищных кормов и т.п. [1, 2, 3, 4, 5].
Контроль за технологическими процессами в условиях пастбищного содержания животных с применением самолётных и вертолётных, аэростатных средств, спутниковых систем – перспективное направление развития индустриального аграрного производства. Однако в условиях управления отдельным стадом крупного рогатого скота, овец, коз и др. при своевременном реагировании на возможные природные изменения, при заболеваниях животных и т.п. функционал данных систем часто избыточен и их выполнение технически сложно или экономически нерационально при низком уровне роботизации.
В большинстве случаев задачи реализации технологий управления стадом эффективно решаются группой роботов – беспилотных летательных аппаратов (БПЛА) преимущественно вертикального взлёта и посадки и вспомогательным оборудованием, дислоцируемым в зоне расположения стада [6–9]. Состав группы:
– робот-мастер;
– специализированные (функционально ориентированные) роботы;
– средства обеспечения функционирования БПЛА – мобильная передвижная технологическая база с операционными площадками (стартовая площадка: система подзарядки; рабочее место операторов: навигация, аналитика, технология);
– станция управления;
– расходные материалы биохимического / биофизического воздействия на животных.
Входящие в группу БПЛА оснащены устройствами технического зрения и обмена информацией. Специализированные роботы, кроме этого, имеют технологическое оборудование для воздействия на животных, забора образцов почвы, травы или воды и др.
Контроль за функционированием группой роботов выполняет подсистема локального управления через связь с роботом-мастером под наблюдением оператора по сетецентрическим [10] либо другим принципам.
Задачи, решаемые БПЛА в животноводстве:
– мониторинг дальних пастбищ (мест выпаса): оценка степени износа пастбищ (качество травы, наличие ядовитых растений), поиск отбившихся от стада животных, направление их на территорию локализации стада и т.п.;
– дистанционный контроль параметров технологического процесса;
– дистанционный контроль здоровья и выявление заболевших животных в стаде;
– ветеринарная помощь: доставка БПЛА-курьером на место выпаса стада медикаментов для лечения заболевших животных, результатов анализов заболевших – в ветклинику, дистанционный ввод больному животному медпрепаратов (успокоительного, вакцин, антибиотиков, глистогонных средств и т.п.);
– охрана и безопасность: предотвращение краж скота, защита от хищников, охрана животных на выпасе в ночное время, например, зафиксированным над пастбищем (привязным) БПЛА (патент РФ № 2471343);
– мониторинг при экологических катастрофах (пожары, наводнения, ураганы), обеспечение карантина и оценка качества удалённых пастбищ, подготовка данных для страховой / судебной экспертизы и т.п.
Задачи роботизации:
– снижение трудозатрат при реализации технологических операций, ликвидация рутинных действий;
– ускорение операций обработки информации, анализа статистики, качества учетно-отчетных данных;
– повышение оперативности и качества обслуживания при модернизации и обновлении компонентов традиционных технологий;
– облегчение обмена информацией, результативного участия в кооперативных и интеграционных системах.
В настоящее время в технической литературе недостаточно полно представлена информация о специфичных технологических операциях отгонного животноводства, таких как: обездвиживание и лечение, контроль вымени и т.п. В статье эти операции рассмотрены подробнее.
Результаты исследования и их обсуждение. Мониторинг территорий. После получения задания специализированные БПЛА выполняют дистанционное наблюдение за стадом (рисунок 1):
– съёмка местности фото-, видео- или ИК-камерами;
– обработка результатов съёмки программой распознавания животных;
– анализ данных распознавания, выбор управленческих решений.
В ходе воздушного видеообследования формируют электронную карту контролируемой местности (территории расположения стада). Далее программа распознавания животных автоматически вычисляет координаты отдельных особей. При различном видовом составе животных по отличительным видовым признакам выявляют принадлежность животного к виду. При этом обнаруживают ситуации, требующие опера- тивного вмешательства при наличии опасности для животных от хищников и воров.
В ходе воздушного видеообследования территории, где расположено стадо, также оценивают биометрические характеристики животных. В инфракрасном спектре выявляются особи с повышенной температурой тела, при необходимости наблюдают за животным, сопровождают его в заданную точку, конкретизируют и производят соот- лечения (обездвиживание, определение стадии заболевания, биохимическое / биофизическое воздействие).
С целью экономии энергии для мониторинга пастбищ, а также решения других задач, например, защиты животных от солнечного облучения на пастбищах и др., могут использоваться летательные аппараты весом легче воздуха (патент РФ № 2471343).
ветствующую технологическую операцию
Координация с верхним уровнем управления Higher level control system coordination
Обработка видеоданных и сенсорной информации Video data and sensory information processing
Обобщение и анализ оперативной информации, управление технологическими процессами, адаптация к среде Generalization and analysis of operational information, process control, adaptation to the environment
Выработка управляющих команд на исполнительные устройства
Development of control commands for activating devices
Формирование электронной карты территории Formation of an electronic map of the territory
Определение глобальных координат, текущего положения объектов наблюдения Determination of global coordinates, current position of objects of observation
Реализация технологических операций с учетом динамических характеристик устройств, объекта наблюдения, условий функционирования
Implementation of technological operations, taking into account dynamic characteristics of its devices, an object of observation, operating conditions
Формирование, накопление и корректировка базы знаний о среде Formation, accumulation and adjustment of the data base about the environment
Обеспечение безопасности технологических процессов, принятие решения о действиях в нештатных ситуациях
Ensuring the safety of technological processes, making decisions on actions in emergency situations
Рисунок 1 – Задачи, решаемые системой управления группы БПЛА Figure 1 – Tasks solved by the control system of the UAV group
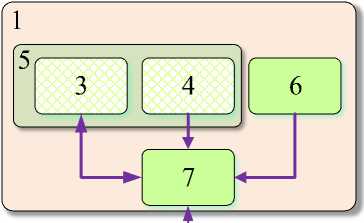
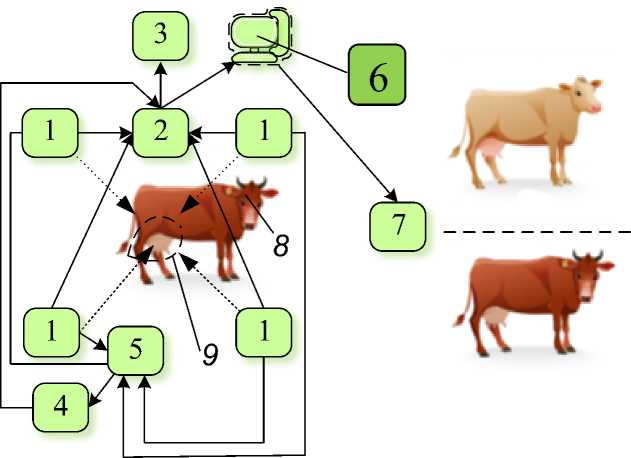
Обездвиживание животных. Реализацию операций обездвиживания животных, введения необходимых лекарственных препаратов осуществляют БПЛА, управляемые из центра управления технологическими процессами (рисунки 2, 3). На БПЛА установлен манипулятор (до 6 степеней свобо- ды, 4–6 осей), на рабочем основании которого размещают сменный рабочий орган с комплектом препаратов для обездвиживания животных.
После дистанционного поиска и обнаружения животного в пределах зоны его возможного нахождения центр управления технологическими процессами формирует задание и конкретизирует технологическую операцию, подлежащую выполнению (наблюдение, введение в заданную точку, обездвиживание, лечение и т.п.). Через блоки передачи информации задание передают на БПЛА. Беспилотный летательный аппарат с помощью блока видеонаблюдения производит обнаружение интересуемого животного, оценку биометрических характеристик интересуемого животного, выбор необходимого объёма используемого фармакологического средства. Используя дальномер, осуществляют приближение к животному на расстояние, гарантирующее успешное выполнение предусмотренной заданием технологической операции (1–5 м). Меняя положение манипулятора, нацеливают ра- бочий орган с комплектом препаратов для обездвиживания интересуемого животного. Затем дистанционно специальным инструментом для инъекции производят введение фармакологического средства в тело животного (в ягодицу, шею и др.). Игла шприца входит в мышечные ткани животного, сдвигает пластиковую трубочку, освобождая боковое отверстие иглы, и раствор препарата выталкивается поршнем в мышцы. Впрыск – мягкий, не травмирующий животное . Выбор фармакологического препарата, его дозы выполняют с учётом индивидуальных характеристик животного, введение фармакологического средства производят на расстоянии, обеспечивающем положительный эффект.
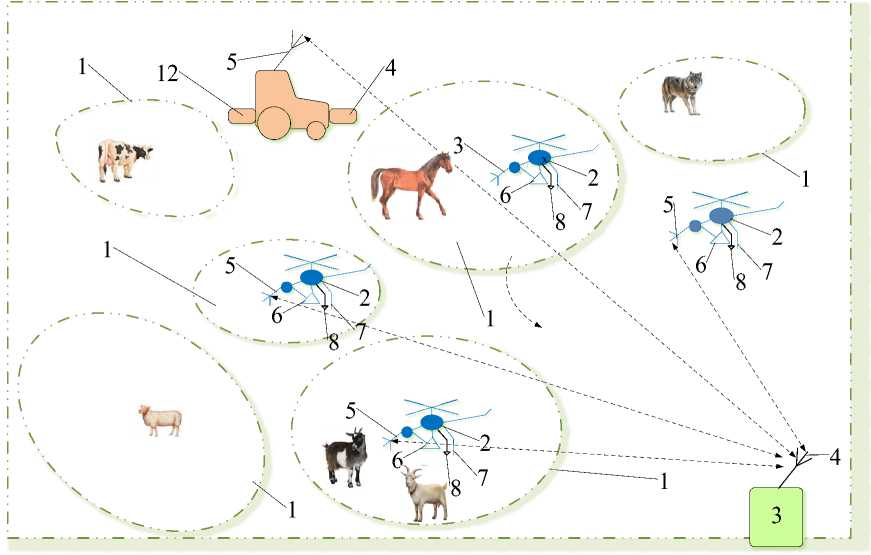
1 – территории возможного пребывания интересуемого животного (ареалы диких животных);
2 – БПЛА; 3 – центр управления технологическими процессами; 4 – мобильная технологическая база; 5 – средства коммуникации; 6 – средства технического зрения; 7, 8 – исполнительные органы Рисунок 2 – Размещение объекта и средств дистанционного обнаружения животных
1 – territories of possible location for animal of interest (wild animal habitats); 2 – UAV;
3 – process control center; 4 – mobile technological base; 5 – communication facilities; 6 – artificial vision;
-
7 , 8 – executive bodies
Figure 2 – Placement of an object and means of remote detection of animals
-
1 – БПЛА; 2 – центр управления технологическими процессами обездвиживания животных;
-
3 – рабочий орган; 4 – комплект препаратов для обездвиживания животных; 5 – манипулятор;
-
6 – блок видеонаблюдения; 7 – дальномер, первый блок передачи информации;
-
8 – второй блок передачи информации
Рисунок 3 – Устройство дистанционного обнаружения и обездвиживания животных
-
1 – UAV; 2 – control center for technological processes of animal immobilization; 3 – working body; 4 – set of preparations for animal immobilization; 5 – manipulator; 6 – video surveillance unit; 7 – range finder, first block of information transmission; 8 – second block of information transmission
-
Figure 3 – Device for remote detection and immobilization of animals
-
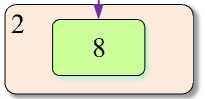
1 – блок технического зрения; 2 – блок обработки информации; 3 – база данных; 4 – блок создания зоны равномерного освещения и многостороннего контроля вымени; 5 – блок синхронизации кадров блоков технического зрения 1; 6 – рабочее место специалиста-технолога; 7 – селективные (сортировочные) ворота; 8 – зона равномерного освещения и многостороннего обзора вымени;
-
9 – наблюдаемое животное
Рисунок 4 – Структура устройства дистанционного контроля физиологического состояния вымени и доильных сосков сельскохозяйственных животных
-
1 – artificial vision block; 2 – information processing block; 3 – database; 4 – block for creating a zone of uniform illumination and multilateral control of the udder; 5 – block for synchronizing frames of vision blocks 1; 6 – workplace of a technologist; 7 – selective (sorting) gate;
-
8 – zone of uniform illumination and multilateral view of the udder; 9 – observed animal Figure 4 – The structure of the device for remote control of the physiological state of the udder and milking teats of farm animals
После введения фармакологического препарата видеоконтроль процесса обездвиживания животного продолжают до момента достижения позитивного результата. При негативном результате продолжают преследование животного и повторяют введение фармакологического препарата. Информацию о ходе выполняемых технологических процессов передают в центр управления для контроля / корректировки технологических процессов.
Таким образом, все технологические процессы, а именно, обследование территории, обнаружение и распознавание животного, преследование животного, выбор фармакологического средства, фиксацию момента обездвиживания и метки на животном производят автоматически в центре управления технологическими процессами по данным дистанционного анализа ви-деоцифровой информации.
Контроль вымени. Осуществляют путём видеоцифрового наблюдения за животным в период дойки. При этом устройство технического зрения (рисунок 4) дистанционно оценивает физиологическое состояние вымени и доильных сосков наблюдаемого животного:
– после подготовки к доению и обмывки вымени устройствами технического зрения в регламентированном технологическим процессом оптическом диапазоне производят многостороннее обследование вымени и сосков контролируемого животного. Оценку температуры тела животного выполняют в диапазоне спектра ультрафиолетового излучения, дифференцирование цветов оттенков – в диапазоне видимого спектра, определение контраста – в диапазоне инфракрасного спектра. Управление работой блоков технического зрения, а также создание требуемых условий видеонаблюдения при многостороннем обзоре вымени (образование зон равномерного освещения, ди- станцирование и др.) обеспечивает блок синхронизации кадров блоков технического зрения;
– в блоке обработки информации по полученным видеоданным создают панорамные видеоцифровые образы вымени и отдельных сосков наблюдаемого животного;
– полученные видеоцифровые образы вымени и сосков обрабатывают по специальным алгоритмам, предусматривающим сопоставление видеоцифровых образов изображения вымени и сосков контролируемого животного, сравнивают с эталонами вымени и сосков здоровых особей в базе данных;
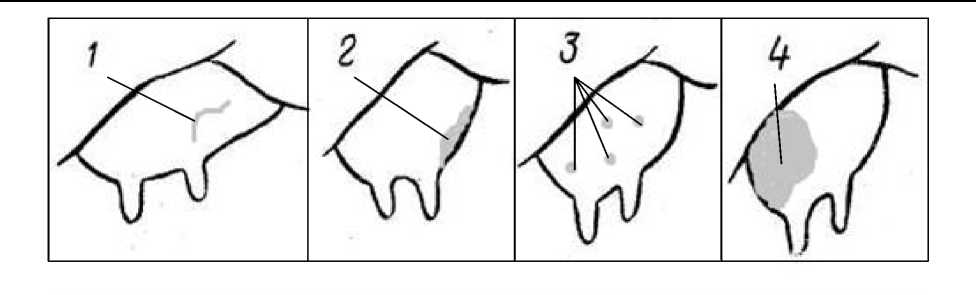
– в процессе сравнения с эталонами обнаруживают дефекты вымени и сосков и их отклонения от нормы (рисунок 5): кровоизлияние, папилломы и бородавки (доброкачественные опухоли в толще кожи), трещины кожи, лоскутные и рвано-ушибленные травмы на поверхности вымени, выделение молока на поверхности соска (при проникающих ранах), тугодойность (сужение канала соска), уплотнения в канале соска (шарики и рубцы), недержание молока, сокращение объёма и заращение полости сосковой цистерны, непроизвольное вытекание молока через канал соска струйкой либо каплями, отёк (начиная с сосков, отек распространяется по всей молочной железе) или фурункулез вымени и т.п.;
– на вымени или сосках контролируемого животного фиксируют отклонения от нормы (морфологические признаки: отклонения температуры, оптические контрасты, цветовые несоответствия и др.), локализуют на видеоцифровых образах зоны повреждений или заболеваний вымени и сосков и, в зависимости от поставленного диагноза, передают результаты в базу данных специалиста-технолога, а животное, используя селективные ворота, изолируют и затем подвергают лечению.
а а

б b
Рисунок 5 – Видеоцифровые панорамные изображения дефектов вымени и сосков Дефекты вымени ( a ): 1 – ушибы; 2 – отёк; 3 – фурункулы; 4 – мастит. Дефекты сосков ( б ): 1 – трещины; 2 – раны; 3 – заращение; 4 – недержание молока; 5 – папилломы; 6 – бородавки
Figure 5 – Video digital panoramic images of udder and teat defects
Udder defects ( а ): 1 – bruises; 2 – edema; 3 – furunculi; 4 – mastitis. Nipple defects ( b ):
1 – cracks; 2 – wounds; 3 – fusion; 4 – milk incontinence; 5 – papillomas; 6 – warts
Описанное техническое решение повышает качество и оперативность, уменьшает стоимость технологических процессов выявления и ликвидации заболеваний вымени и сосков сельскохозяйственных животных, обеспечивает возможность реализации данных процессов в режиме реального времени.
Сетецентрическое управление. Реализация агротехнологий на практике осложнена тем, что в период развития и изменения ОАП в агротехноценозах (АТЦ) происходят и взаимодействуют между собой различные процессы в окружающей среде и в техногенных структурах [9, 10]. Функционирование АТЦ характеризуют сложнейшие стохастические режимы эксплуатации (неуправляемые изменения в окружающей среде, процессы самоорганизации и авторегулирования в ОАП).
Из-за отсутствия нужных объёмов достоверной оперативной информации: о ходе процессов (недостаточно надёжные датчики, каналы передачи информации по уровням управления, невозможность контроля параметров всех требуемых точек технологического процесса и др.), низкой адекватности математических моделей агротехнологий, описаний объектов контроля и управления – степень неопределённости режимов функционирования АТЦ очень высока. Отражая внешние воздействия, система (АТЦ) сама активно воздействует на среду. Происходит взаимодействие и взаимоотражение среды и системы, их взаимодетерминация и взаимо-рецептивность. Система адаптируется к среде и одновременно среда адаптируется к системе.
Системный подход позволяет продуктивно реализовывать основные функции в управлении АТЦ [9,10]: планирование, организацию, руководство, контроль, прогнозирование. При этом комплексно оценить любую производственно-хозяйственную ситуацию, наилучшим образом организовать процесс принятия решений, выявить и решить проблемы, возникающие на уровне конкретных характеристик процессов, на разных уровнях управления. Система управления в ходе многошагового итеративного процесса сравнения альтернативных вариантов может совершенствоваться на основе выявленных недостатков, появления новых задач и требований.
Предиктивная аналитика – эффективный подход в ходе решения задач агропроизводства (патент РФ № 2601056). При реализации прогнозного управления агротехнологиями информация о состоянии саморегулирующихся и адаптирующихся в соответствии с природной целеадаптивной функцией авторегулирования живых организмов (растений, животных) может быть получена на структурном уровне от сенсоров, внедрённых в живые организмы. Возможно спрогнозировать изменение параметров и характеристик выполняемых технологических процессов возделывания растений, а при осуществлении управления процессами реализовать наиболее эффективные режимы.
Согласно сетецентрическим принципам управление стадом на отдалённых пастбищах реализуется локальным уровнем системы. Построение системы, а также алгоритм её работы целесообразно формировать в виде отдельных блоков, из которых создаётся система управления под конкретную задачу.
Рассматриваемые в статье технологические операции локального сетецентрического управления включают поиск, обнаружение, распознавание, фиксацию и биофизическое воздействие на животное. Эти операции осуществляют дистанционно и автономно, без прямого участия человека. При этом обеспечивается высокая эффективность, оперативность, безопасность и сокращение стоимости процессов.
Выводы
-
1. Задачи технологий управления стадом на дальних пастбищах эффективно решаются группой роботов – БПЛА преимущественно вертикального взлёта и посадки, дислоцируемых в зоне расположения стада.
-
2. В ходе мониторинга территории выпаса локальная система сетецентрического управления БПЛА формирует актуальную электронную карту контролируемой местности, распознаёт принадлежность животного к виду, вычисляет координаты отдельных особей, оценивает биометрические характеристики животных, выявляет заболевших животных, конкретизирует процедуру лечения (фиксация/обездвиживание, определение этапа лечения, биохимическое / биофизическое воздействие) и с помощью БПЛА реализует её.
-
3. Специализированный алгоритм работы сетецентрического управления предполагает поиск отбившихся от стада животных, направление их на территорию локализации, доставку БПЛА-курьером медпрепа-ратов на место выпаса. Применение на БПЛА систем видеонаблюдения, оборудования для забора образцов почвы, травы или воды позволит выполнять оценку степени износа пастбищ (качество травы, наличие ядовитых растений и т.п.).
-
4. Рассматриваемые в статье технологические операции осуществляют дистанционно и автономно, на безопасном расстоянии без непосредственного участия человека с гарантированным положительным эффектом. Мониторинг стада с воздуха с помощью БПЛА позволяет значительно улучшить качество выполняемых технологических процессов, обеспечить сохранность стада на выпасе, увеличить объёмы производимой продукции и прибыль предприятия в целом.
Функционированием БПЛА управляет локальная система сетецентрического управления при контроле оператором.
Список литературы Аэромобильные устройства в технологиях пастбищного животноводства
- Барталев С.А., Егоров В.А., Жарко В.О., Лупян Е.А., Плотников Д.Е., Хвостиков С.А., Шабанов Н.В. Спутниковое картографирование растительного покрова России. М.: ИКИ РАН, 2016. 208 с.
- Блохина С.Ю. Применение дистанционного зондирования в точном земледелии // Вестник российской сельскохозяйственной науки. 2018. № 5. C. 10-16.
- Rodríguez F. (&) Moreno J.C., Sánchez-Molina J.A., Berenguel M. Grasping in Agriculture: State-of-the-Art and Main Characteristics. Grasping in Robotics. 2012. P. 385-409.
- Monkman G.J., Hesse S., Steinmann R., Schunk H. (2007). Robot grippers. Wiley-VCH, Weinheim. 463 p. https://download.e-bookshelf.de/ download/0000/7920/09/L-G-0000792009-0013843805.pdf (дата обращения 14.01.2023).
- Mariano Gonzalez-de-Soto, Luis Emmi. Autonomous systems for precise spraying-evaluation of a robotised patch sprayer // Biosystems engineering. June 2016. Vol. 146. P. 165-182.
- Буре В.М., Митрофанов Е.П., Митрофанова О.А., Петрушин А.Ф. Выделение однородных зон сельскохозяйственного поля для закладки опытов с помощью беспилотного летательного аппарата // Вестник Санкт-Петербургского университета. Прикладная математика. Информатика. Процессы управления. 2018. Т. 14. № 2. С. 145-150.
- Shulin Yang, Xiaobing Yang, Jianyou Mo. The application of unmanned aircraft systems to plant protection in China // Precision Agriculture. 2018. Vol. 19. P. 278-292.
- Нго К.Т., Соленая О.Я., Ронжин А.Л. Анализ подвижных роботизированных платформ для обслуживания аккумуляторов беспилотных летательных аппаратов // Труды МАИ. 2017. № 95. С. 11. URL: http://trudymai.ru/ published.php?ID=84444.
- Башилов А.М., Королев В.А., Можаев К.Ю. Перспективы использования дронов в реализациях новейших агротехнологий // Вестник ВИЭСХ. 2016. № 4 (25). С. 68-75.
- Башилов А.М., Королев В.А. Трансформация виртуальных пространств агробизнеса в реальное производство // Федеральный журнал "АгроФорум". 2021. № 6. С. 70-73.
