Алгоритм 2 управления динамическими системами в неизвестной статической среде

Автор: Лопатин Павел Константинович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (11), 2006 года.
Бесплатный доступ
Представлен алгоритм управления динамическими системами в неизвестной статической среде в условиях, когда сенсорная система поставляет информацию о локальных окрестностях различных точек рабочего пространства системы. Доказана теорема, утверждающая, что, двигаясь по данному алгоритму, система достигнет целевого состояния за конечное число шагов. Приведены следствия из теоремы, способствующие лучшему функционированию системы.
Короткий адрес: https://sciup.org/148175277
IDR: 148175277 | УДК: 519.713
Algorithm 2 for dynamic systems control in an unknown static environment
It is presented an algorithm for dynamic systems control in an unknown static environment for conditions when a sensor system supplies information about local neighborhood of different points in a configuration space. It is proved the theorem stating that while moving according to the algorithm the dynamic system reaches a target state in the finite number of steps. It is given sequences from the theorem which facilitate the system functioning.
Текст научной статьи Алгоритм 2 управления динамическими системами в неизвестной статической среде
При управлении динамическими системами (ДС) информация об ограничениях на состояния часто известна не полностью, а поступает от датчиков внешней информации по мере функционирования системы в среде. Подобная ситуация возникает для манипуляционных и иных робототехнических систем, действующих в среде с заранее неизвестными препятствиями, для летательных аппаратов и др.
В данной статье будет представлен алгоритм управления динамическими системами, описываемыми посредством n-мерного пространства состояний, в среде с неизвестными запрещенными статическими состояниями; доказана теорема, утверждающая, что, двигаясь по данному алгоритму система достигнет целевого состояния за конечное число шагов, и приведены следствия из теоремы, способствующие лучшему функционированию системы.
Динамическая система представляется в пространстве состояний как точка. При управлении ДС типичной является следующая задача: даны стартовое положение ДСХ= (x10,x20,., xf) и целевое x 7Hxfxd,..., xf), требуется передвинуть ДС из х 0 в целевое х 7 за конечное число шагов.
Функционирование ДС должно происходить в пределах ограниченной области^. Будем считать, что эта область имеет такой вид, что для любого х е Авыполняются неравенства
« 1 < . т < « 2, (1)
где а 1, а 2- соответственно векторы нижних и верхних ограничений на значения переменных состояния. Таким образом, область А'представляет собой гиперпараллелепипед. Все точки, не удовлетворяющие условию (1), будем считать запрещенными. Кроме того, следует учитывать, что и внутриАмогут присутствовать запрещенные состояния, но перед началом движения информации о них нет или она неполна. Остальные точки внутри (1) считаем разрешенными.
Итак, требуется передвинуть ДС за конечное число шагов из положения х в положение х 7, при этом результирующая траектория не должна налегать ни на одну из запрещенных точек, присутствующих в гиперпараллелепипеде (1), и должна удовлетворять неравенствам (1). Все движение должно осуществляться по разрешенным точкам.
Исследованию алгоритмов управления различными динамическими системами в известной и неизвестной
' Работа выполнена при поддержке Российского фонда фундаментальных исследований, грант №05-08-01199-а.
среде посвящены многие публикации. В частности, имеются хорошие обзоры таких алгоритмов [1; 2]. Также предложены алгоритмы, гарантирующие нахождение траектории в среде с известными препятствиями при условии, что такая траектория существует [3; 4; 5].
В принципе, некоторые алгоритмы планирования в известной среде могут быть использованы и для планирования движения в неизвестной среде. Если мы дискретизируем пространство состояний, то тогда можно будет использовать графовые методы поиска траектории движения ДС из х 0 в х Т [2; 6]. Однако эти алгоритмы имеют одно общее свойство, которое затрудняет их применение для управления ДС в неизвестной среде. Оно заключается в том, что данные алгоритмы в том или ином объеме требуют осуществлять поиск в ширину, иначе достижение целевой точки не гарантируется [7]. Но при поиске в ширину часто возникает следующая ситуация: предположим, что мы только что закончили рассмотрение вершин, соседних к вершине х , и теперь нам нужно рассматривать вершины, соседние вершине х ' , и вершины х и х ' , не являющиеся соседними. И для того чтобы рассмотреть вершины, соседние к х ' , ДС должна сначала передвинуться в х ' . Таким образом, возникает задача планирования маршрута из х в х ' . Другими словами, мы получаем первоначальную задачу планирования траектории, в которой х 0 и х Т только заменены на х и х ' . При планировании же в известной среде ЭВМ просто «переключает свое внимание» от х к х ' , которые хранятся в ее памяти. А необходимость поиска и реализации путей для многих различных х и х ' делает общую сумму передвижений ДС очень большой. В соответствии с классификацией [2], представителями алгоритмов поиска в ширину являются собственно алгоритм поиска в ширину, алгоритмА*, эвристический поиск «первый-лучший», ленивый вероятностный маршрут, динамическое программирование.
В методах, основанных на случайном потенциальном поле, алгоритме «Нить Ариадны», быстро исследующих случайных деревьях [2] новые вершины генерируются случайным образом и потому они имеют описанный выше недостаток, вызывающий множество перемещений в новые случайно сгенерированные вершины. Для управления динамическими системами в неизвестной среде также могут использоваться алгоритмы поиска в глубину, но они не всегда доводят до цели [7].
Для решения нашей задачи может быть использован подход, основанный на автоматическом доказательстве теорем [8], но и этот подход требует рассмотрения большого количества вариантов и направлений поиска и поэтому его применение оказывается неэффективным [9].
В методе искусственных потенциалов [10] ДС представлена в виде заряженной точки, запрещенные состояния наделяются отталкивающими потенциалами, а целевая точка - притягивающим потенциалом. Работа метода демонстрируется для известных запрещенных состояний, но не указывается, как распоряжаться поступающей информацией об обнаружении ранее неизвестных запрещенных состояний. И в общем случае нет гарантии того, что траектория, свободная от столкновений, будет найдена [1].
Для методов планирования траектории в среде с наперед известными запрещеными состояниями имеется одна общая проблема: очень трудно собрать заранее полную информацию о расположении запрещенных состояний в рабочей зоне динамической системы и представить эту информацию в виде, пригодном для учета при планировании траектории. Но в случае использования предложенного ниже алгоритма можно будет видеть, что собирать полную информацию о запрещенных состояниях заранее не требуется, ДС будет собирать необходимую информацию самостоятельно в ограниченных объемах и в терминах пространства состояний, что удобно для планирования траектории.
В [11] представлен алгоритм управления таким классом динамических систем, как роботы-манипуляторы, среди неизвестных препятствий, расположенных в трехмерном декартовом пространстве. Манипулятор должен иметь не более трех звеньев и последняя кинематическая пара должна быть поступательной. При таких предварительных условиях алгоритм гарантирует достижение цели за конечное число шагов.
В [12; 13] описано применение семантических сетей (М-сетей) для задачи управления роботами в неизвестной среде. Недостатком такого подхода является необходимость предварительного обучения сети, которая моделирует работу планирующей системы. Отсутствие формальных алгоритмов обучения делает невозможным обучение сложной сети, которая должна планировать действия робота в среде, близкой к естественной.
В [14; 15] предложено преобразовать подход, основанный на пространстве конфигураций, с тем, чтобы иметь возможность описывать движение робота в неизвестной среде. Для этого результатам действий робота и ситуациям в среде необходимо приписывать оценки доверия, основанные на формализмах теории вероятностей, модальной или нечеткой логики, но метода для генерации обоснованных оценок так и не предложено. В [9] в систему логического вывода введены оценки правдоподобности вывода, соответствующие неопределенности ситуаций в среде, но не говорится о том, как назначать эти оценки.
Ранее нами был представлен алгоритм, названый базовым, на примере и-звенного манипулятора, который гарантирует достижение целевого состояния, при этом предполагалось, что сенсорная система способна доставлять информацию только об окружении текущей точки траектории [16; 17]. В данной статье будет предложен новый алгоритм управления динамическими системами, в том числе и роботами-манипуляторами, также гарантирующий достижение цели за конечное число шагов, но при этом возможно, что сенсорная система доставляет информацию об окружении сразу нескольких точек пространства состояний ДС. Назовем этот алгоритм Алгоритмом 2. Поступление такой информации возможно при использовании систем технического зрения и других сенсорных систем.
Постановка задачи управления динамическими системами в среде с неизвестными запрещенными статическими состояниями. Рассмотрим задачу управления и-мерной ДС в среде с неизвестными запрещенными ста- тическими состояниями в следующей постановке: даны состояниях0 ихТ, при этом в гиперпараллелепипеде (1) могут присутствовать запрещенные состояния, но перед началом движения у системы управления о них нет информации или эта информация неполна. Требуется сделать, чтобы ДС передвинулась изх0 вхТ за конечное число шагов.
Сделаем следующие допущения:
-
- расположение и количество запрещенных состояний внутри (1) остается неизменным в течение всего времени движения ДС;
-
- заранее известно, что целевое состояние допустимо т. е. не является запрещенной точкой и удовлетворяет ограничениям (1), и достижимо, (т. е. известно, что в (1) можно найти хотя бы одну линию, соединяющую х 0 и х Т, и не налегающую на запрещенные состояния;
-
- результирующая траектория должна удовлетворять неравенствам (1) для каждого момента времени;
-
- ДС имеет сенсорную систему, которая может доставлять информацию об г-окрестностях точекх. е X, . = 0, 1, ..., N, где N- некоторое конечное число, обусловленное конструкцией сенсорной системы и условиями ее функционирования. Под г-окрестностью точки х . будем понимать гипершар с центром в точке х . и радиусом г>0 (см. рисунок). Множество всех точек, входящих в г-окре-стность точки х . , обозначим У( х ) Слова «доставляет информацию об г-окрестности точки х . » означают, что относительно каждой точки из множества У( х . ) сенсорная система определяет, является ли она запрещенной или разрешенной, при этом все запрещенные точки сенсорная система заносит в множество 5( х . ), а все разрешенные точки - в множество 2(х). Способ записи множеств У(х.), 2(х), 2( х ) может быть разным - в виде формул, списков, таблиц и т. д., но мы считаем, что этот способ определен. Устройство сенсорной системы в данной работе не рассматривается.
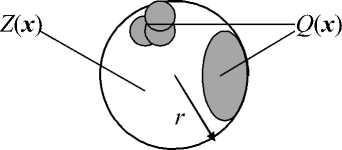
Пример г -окрестности точки х множествами 2 ( х ) и Q (х)
Обращаем внимание, что если в прежних публикациях [16; 17] предполагалось, что сенсорная система способна доставлять информацию только о множестве У( х ), где х - текущая точка траектории, то в данной статье мы считаем, что сенсорная система может доставлять информацию об г-окрестностях сразу нескольких точек х . , количество и расположение которых определено условиями функционирования ДС и конструкцией сенсорной системы.
Алгоритм 2. При дальнейшем изложении примем, что точки x " ,n = 0, 1,2, . - это точки, в которых происходит генерация новой траектории и которые мы будем называть точками смены траектории. Перед началом работы алгоритма и = 0 и, очевидно, хи= х0.
Шаг 1. При нахождении ДС в хи, и = 0, 1, 2, ., ее сенсорная система доставляет информацию об г-окрест-ности точких ” , а та кже об г-окрестностяхточек/Д = 0,1, ..,Nn, гдеуО.Адля каждого j = 0,1, ., Хи; Nn - некоторое известное конечное число. Точки/,/ = 0,1, .,Nn и само число N являются, вообще говоря, разными для каждого и и сообщаются сенсорной системе перед ее запуском на каждом и. Таким образом, сенсорная система доставляет информацию о множестве 5(хи) и о множестве
Nn
QS n = U Q ( y j ). (2)
j = 0
Затем ДС планирует в пространстве состояний предварительную траекторию Д х^х 7), которая должна удовлетворять следующим условиям:
-
1) соединять х и и х Т;
-
2) не налегать ни одной своей точкой ни на одну из nn
точек из U Q ( x i ) и U QS i , т. е. ни на одну из известных i =0 i =0
на данный момент запрещенных точек;
-
3) удовлетворять ограничениям (1).
ДС начинает двигаться по траектории Д х и, х Т). Переход алгоритма на Шаг 2.
Шаг 2. При отработке Д х и, х Т) возможны два исхода:
-
- ДС не встретит ранее неизвестных запрещенных состояний, налегающих на ДХ, хТ) и, как следствие, достигнет х Т. По достижении х Т алгоритм заканчивает свою работу;
-
- ДС, перемещаясь по непрерывно следующим одна за другой разрешенным точкам Т( х и, х Т) придет в точку, (предварительно выполнив и = и + 1 обозначим ее как х и, и = 1,2, .), следующая за которой является запрещенной. Переход алгоритма на Шаг 1.
Теорема. Если ДС будет двигаться по вышеприведенному алгоритму, то она достигнет цели за конечное число шагов.
Доказательство. Пусть ДС, находясь в х и, спланировала траекторию, удоветворяющую условиям Шага 1 Алгоритма 2, приводящую ее в х Ти начала по этой траектории двигаться. Если во время движения ДС не встретит ранее неизвестных запрещенных состояний, она достигнет цели за конечное число шагов (в силу конечности длины траектории). Поэтому бесконечность блуждания ДС может быть вызвана только бесконечной сменой предварительной траектории.
Бесконечность смены предварительной траектории может быть вызвана следующими обстоятельствами:
-
- ДС будет все время попадать в одну и ту же точку смены траектории;
-
- число точек смены траектории будет бесконечным.
Покажем, что все точки смены траектории различны. Предположим, что ДС сменила траекторию, находясь в точке х s, а потом опять сменила траекторию, будучи в точке х р, т. е. s < р. Покажем, чтоХ^ х р. Предположим сначала, что х = х р. Тогда 5(Х) = 5(Х). Находясь вХ, ДС сгенерировала траекторию, не налегающую на множества запрещенных точек, в том числе и Q(X). Затем ДС, оказавшись тоже в х р, обнаружила, что следующая за ней точка является запрещенной, т. е. предварительная траектория налегает на 2(Х) = Q(X), что невозможно. Получено противоречие. Следовательно, все точки смены траектории различны.
Покажем, что число точек смены траектории конечно. Предположим, что, наоборот, оно бесконечно и все точки смены траектории должны удовлетворять ограничениям (1). Это означает, что последовательность этих точек ограничена. Согласно теореме Больцано-Вейерш-трасса, из этой последовательности можно извлечь сходящуюся подпоследовательность^, 1 = 1,2,.... В соответствии со свойством Коши сходящихся последовательностей, для любого е можно найти такой номер s, что все точки х 1, 1 > s, будут лежать в е -окрестности точки X s. Возьмем е <г. Рассмотрим произвольную точку смены траектории х 1, расположенную в е-окрестности точки х s. ДС, находясь в х 1, сменила свою траекторию, это означает, что траектория налегала на множество Q(X') (потому что х 1 и ее соседние точки принадлежат 5( x s)). Отсюда надо сделать вывод, что множество Q(X') не было учтено при генерации той траектории, что невозможно при строгом выполнении предписаний алгоритма. Таким образом, если принять, что число точек смены маршрута бесконечно, то неизбежно возникнет ситуация, которая не может наступить при строгом следовании предписаний алгоритма. Следовательно, число точек смены маршрута конечно.
Конец доказательства.
Таким образом, нами показано, что число случаев смены предварительной траектории будет конечным, другими словами Шаг 1 Алгоритма 2 будет выполнен конечное число раз. Отсюда видно, что задача управления ДС в неизвестной статической среде при вышеуказанных допущениях сводится к решению конечного числа раз задачи планирования траектории движения ДС среди обнаруженных на момент планирования запрещенных состояний.
Алгоритм 2 является расширением базового алгоритма [16; 17], следовательно Базовый алгоритм становится частным случаем Алгоритма 2 при N = 0 для каждого п.
Но иногда требуется еще более интенсивное исследование окружающей среды, предполагающее сходы с предварительно спланированной траектории. Для этих случаев будут полезны приводимые ниже следствия.
Следствие 1. В произвольныхточкахxd, d=0,1,..., Ndn траектории £(х”, х7), где п = 0,1, .; Ndn - некоторое конечное число, не большее, чем число точек в Цх1, х7), ДС может сделать конечное число сходов с траектории Т(хп, х7). Сходом является последовательность непрерывно следующих одна за другой разрешенных точек, отличающаяся от Т(хп, х7) и удовлетворяющая неравенствам (1). Число шагов на каждом сходе должно быть конечным. На каждом шаге схода ДС может исследовать окружающую среду и получать информацию об г-окрестно-стях точек/, 1 = 0, 1, 2, ., Nc1, где у1, 1 = 0, 1, 2, ., NcV -произвольные точки, лежащие вХ; а Nc1 - произвольное конечное число для каждого шага. Осуществив конечное число шагов на сходе, динамическая система должна вернуться на первоначальную траекторию точно по ранее пройденным точкам схода. Если на каком-то шаге схода обнаруживается, что дальнейшее движение невозможно из-за наличия запрещенных состояний, то ДС должна вернуться на первоначальную траекторию точно по ранее пройденным точкам схода. По возвращении на траекторию ЦХ, х7) ДС осуществляет движение в соответствии с Алгоритмом 2. В результате мы получаем конечное число шагов на всех сходах, которое прибавляется к конечному числу шагов по Алгоритму 2 и в итогех7 будет достигнуто за конечное число шагов.
Следствие 2. Динамическая система также может, находясь в какой-либо точке х предварительной траектории или схода, получив информацию о Q( x ) и, возможно, о С( у ), I 0, 1, 2, ., Nc2, где у 1,1 = 0, 1, 2, ., Nc2, -произвольные точки, лежащие вХ; а Nc2 - произвольное конечное число, предварительно выполнив п = п + 1 и х п = х , спланировать новую траекторию£( х п, х 7), удовлетворяющую условиям 1...3 Шага 1 Алгоритма 2, и начать двигаться по ней в соответствии с этим Алгоритмом 2. Иными словами, ДС совершит такое действие (назовем его «отказ от предварительной траектории»), когда, не достигнув х 7, будет спланирована новая траектория, ведущая в х 7. Делать отказы от предварительной траектории можно лишь конечное число раз, а после этого конечного числа раз ДС, пройдя конечное число шагов по разрешенным точкам и находясь в некотором состоянии х , должна выполнить п = п + 1 и х п ^. х и перейти к выполнению алгоритма, гарантирующего достижение х 7 за конечное число шагов. Если в качестве алгоритма, гарантирующего достижение х 7 за конечное число шагов, будет выбран Алгоритм 2, то больше уже будет нельзя делать отказы от предварительной траектории. Тогда конечное число отказов от предварительной траектории прибавится к конечному числу шагов по алгоритму, гарантирующему достижение х 7за конечное число шагов, и в результате мы получим, что х 7 будет достигнуто за конечное число шагов.
Таким образом, в данной статье приведен алгоритм управления динамическими системами, описываемыми посредством п-мерного пространства состояний, в среде с неизвестными запрещенными статическими состояниями. Доказана теорема, утверждающая, что, двигаясь по этому алгоритму, система достигнет целевого состояния за конечное число шагов. Приведены следствия из этой теоремы, способствующие лучшему функционированию системы.
