Алгоритм автоматического регулирования уровня воды в деаэраторе

Автор: Бурмантов Дмитрий Геннадьевич, Коновалов Виктор Иванович, Курганов Василий Васильевич
Журнал: Проблемы информатики @problem-info
Рубрика: Информационные технологии в системах автоматизации
Статья в выпуске: 5 (17), 2012 года.
Бесплатный доступ
Предложен алгоритм автоматического регулирования уровня воды в вакуумном деаэраторе. Особенностью объекта управления является наличие существенного транспортного запаздывания, что делает неэффективным использование классических регуляторов. Алгоритм регулирования модифицирован путем добавления ряда логических правил, что позволило решить поставленную задачу.
Автоматическое регулирование, объект управления с запаздыванием, деаэратор
Короткий адрес: https://sciup.org/14320165
IDR: 14320165 | УДК: 681.5
Текст научной статьи Алгоритм автоматического регулирования уровня воды в деаэраторе
Введение. В процессе внедрения систем автоматического управления на промышленных объектах зачастую требуется учитывать особенности, не рассматриваемые в классической теории управления [1]. Программная реализация современных систем управления на программируемых логических контроллерах позволяет достаточно легко модифицировать известные алгоритмы, в результате чего они приобретают новые качества, позволяющие решать нестандартные задачи.
Рассмотрим задачу построения системы автоматического регулирования (САР) уровня воды в деаэраторе. Деаэратор представляет собой техническое устройство, в котором происходит процесс очистки воды от примесей, в том числе от растворенных в ней газов. Вакуумные деаэраторы используются при подготовке питательной воды для парокотельных установок. Уровень воды в деаэраторе должен оставаться постоянным, так как при его повышении или понижении ухудшается процесс деаэрации [2].
Особенностью деаэратора как объекта управления является наличие существенного транспортного запаздывания, что обусловлено как самой конструкцией деаэратора, так и расположением клапана подпиточной воды вдали от него. Управление клапаном осуществляется с помощью механизма электрического однооборотного (МЭО), в котором присутствуют люфты, еще более увеличивающие запаздывание. Для того чтобы управлять МЭО, в составе программного обеспечения контроллера должен быть предусмотрен алгоритм, выполняющий широтно-
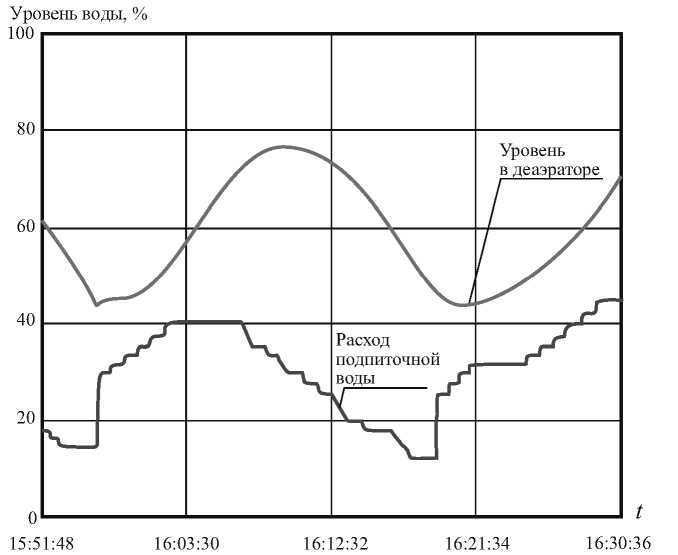
Рис. 1. Процесс регулирования уровня воды в деаэраторе при использовании ПИД-регулятора импульсную модуляцию, и связанный с ним алгоритм импульсного регулирования (РИМ). Использование импульсного регулятора и наличие транспортного запаздывания обусловливают нетривиальность задачи автоматического регулирования уровня в деаэраторе.
Обсуждение подходов к решению задачи. Обозначим передаточную функцию регулятора через R ( s ), а передаточную функцию объекта управления через W 0( s )e -Ts ( T - время транспортного запаздывания). В этом случае передаточная функция обычной замкнутой САР равна
W = R ( s ) W , ( s ) e - T '
з 1 + R ( s ) W , ( s ) e" T* '
В знаменателе передаточной функции присутствует величина e -Ts , которая не позволяет получить приемлемое качество регулирования. На рис. 1 показан процесс изменения уровня воды в деаэраторе и изменение управляющего воздействия - расхода подпиточной воды. Использован пропорционально-интегрально-дифференциальный (ПИД) регулятор. Процесс имеет ярко выраженный колебательный характер, амплитуда колебаний является недопустимой.
Одним из широко распространенных способов управления объектами с запаздыванием является использование регуляторов (или предикаторов) Смита [3, 4]. Предикатор Смита включен в программное обеспечение некоторых контроллеров наряду с классическими ПИД-регуляторами. Предикатор Смита прогнозирует сигнал на выходе объекта управления до того момента, когда он там появляется. Для этого используется модель объекта управления, которая задается передаточной функцией с транспортной задержкой Wm ( s ) e -Ts , ( W M ( s ) - дробно-рациональная функция).
Структурная схема системы управления с регулятором Смита показана на рис. 2. В этом случае передаточная функция замкнутой САР имеет вид
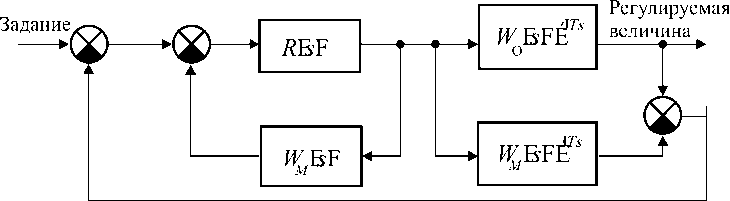
Рис. 2. Схема САР с предикатором Смита
W , ( s ) =
_______________ R ( S ) W , ( s ) e - T ________________
1 + R(s)W„(s) + R(s) ( W,(s) - W„(s)) e-T' '
Из этой формулы следует, что при W 0( s ) = Wm ( s ) в знаменателе отсутствует величина e -Ts , появляется возможность настроить ПИД-регулятор и получить качественный переходный процесс. Условием работоспособности САР с регулятором Смита является получение модели, адекватной объекту управления. Необходимо точное знание транспортного запаздывания. Поэтому перед использованием регулятора Смита необходимо идентифицировать объекты управления [5]. Если у разработчиков системы управления отсутствуют время и возможность для проведения экспериментов на объекте управления, то вследствие неадекватности модели применение регулятора Смита не позволяет получить желаемый результат.
Алгоритм управления на основе применения ограничений и логических правил. Для управления уровнем воды в деаэраторе предлагается применять обычный алгоритм импульсного регулирования, использующий ПИД-закон (с учетом свойств МЭО). Так как в контроллер вводится информация об управляющем воздействии - расходе питательной воды, то задаются ограничения по максимально и минимально возможным расходам, которые запрещают выдачу на алгоритм импульсного вывода управляющего сигнала в сторону увеличения или уменьшения. Кроме того, запрет на выдачу управляющих сигналов может быть сформирован алгоритмом, сравнивающим текущее значение уровня воды с допустимым отклонением его от заданного в большую и меньшую стороны. Два вида ограничений объединяются по схеме "ИЛИ" и поступают на блок запрета знака управляющего воздействия. Введение достаточно слабых ограничений на расход подпиточной воды позволило значительно улучшить процесс регулирования уровня (рис. 3).
Практическая проверка данного алгоритма показала, что ограничения по расходу должны быть изменяемыми, так как при изменении режима работы деаэратора границы необходимо корректировать. В окончательном виде алгоритм регулирования уровня воды был дополнен алгоритмическими блоками, вычисляющими верхнюю и нижнюю границы расхода подпиточной воды в зависимости от возмущения - расхода деаэрированной воды. Алгоритм, выполненный на языке FBD стандарта МЭК 6131-3, включен в состав программного обеспечения АСУ ТП общецехового котельного оборудования на Томском нефтехимическом комбинате. При составлении алгоритма использовалась библиотека функциональных блоков системы IS-aGRAF, расширенная алгоритмами из библиотеки контроллера Р-130. Общий вид алгоритма приведен на рис. 4.
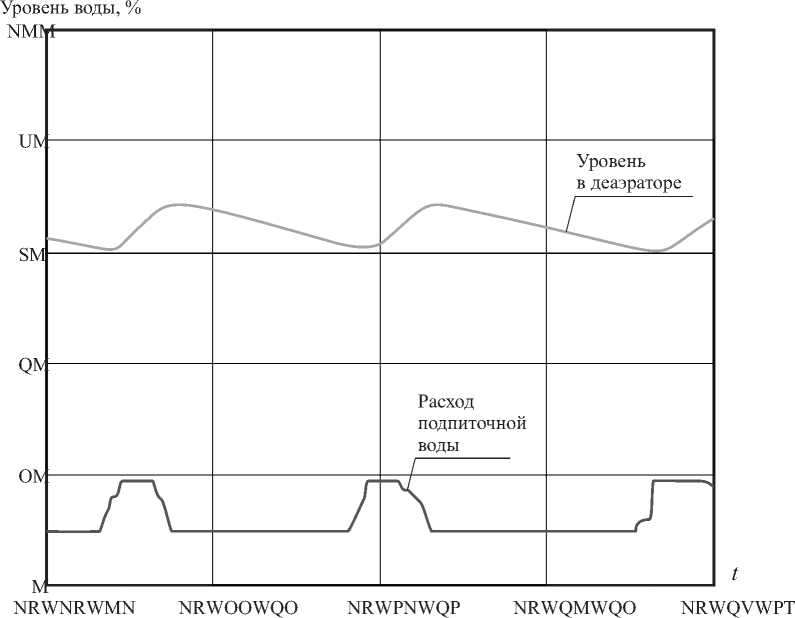
Рис. 3. Процесс изменения уровня воды в деаэраторе при введении ограничений на расход подпиточной воды
Настроечными параметрами алгоритма являются следующие: K - коэффициент пропорциональности (алгоритм РИМ); Т и - постоянная интегрирования (алгоритм РИМ); Т д - постоянная дифференцирования (алгоритм РИМ); E - зона нечувствительности (алгоритм РИМ); Т ф 1 - постоянная фильтра для фильтрации сигнала уровня; Т ф 2 - постоянная фильтра для фильтрации
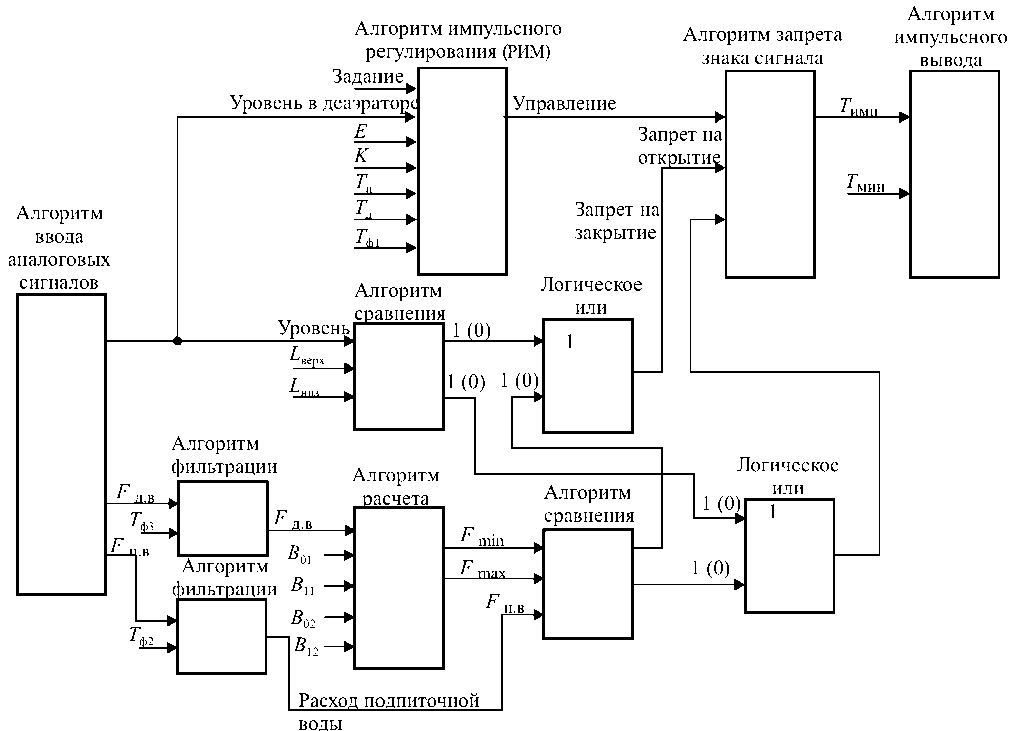
Рис. 4. Алгоритм автоматического регулирования уровня воды в деаэраторе
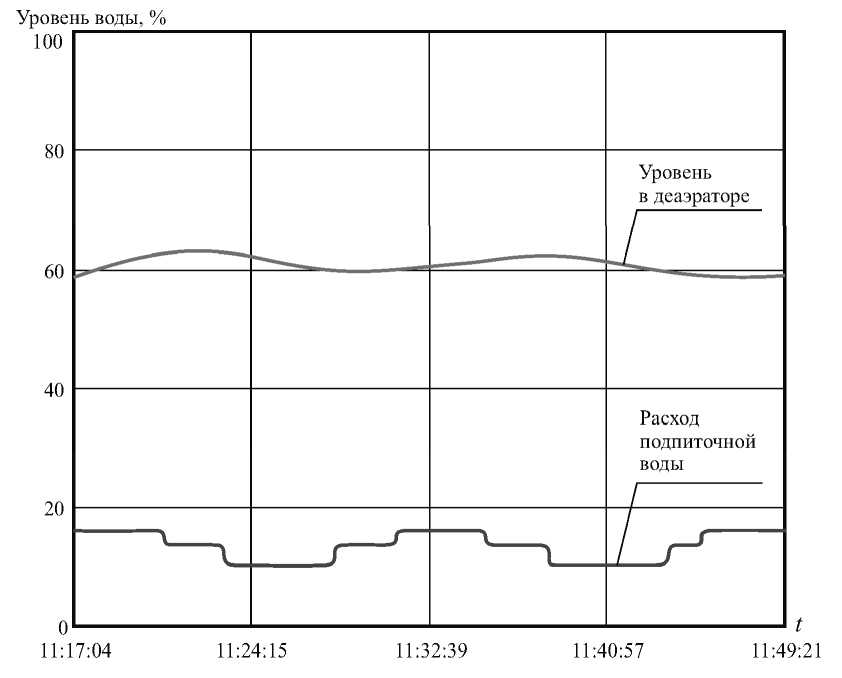
Рис. 5. Процесс регулирования уровня воды в деаэраторе с использованием предложенного алгоритма сигнала расхода подпиточной воды; Тф3 - постоянная фильтра для фильтрации сигнала расхода деаэрированной воды; Lверх - верхнее ограничение по уровню; Lниз - нижнее ограничение по уровню; B01, B 11 - коэффициенты для расчета верхней границы по расходу подпиточной воды; Bоз, B12 - коэффициенты для расчета нижней границы по расходу подпиточной воды; Тmin - минимальная длительность импульса, формируемая контроллером для исполнительного механизма мэо.
Процесс регулирования уровня по предложенному алгоритму показан на рис. 5.
Выводы. Предложен алгоритм автоматического регулирования уровня воды в деаэраторе. Как объект управления деаэратор обладает значительным транспортным запаздыванием. Алгоритм не требует знания модели объекта управления, как в регуляторе Смита. В качестве основы выбран импульсный ПИД-регулятор из библиотеки FBD инструментальной среды программирования ISaGRAF. Импульсный регулятор дополнен блоком запрета на выдачу управляющих сигналов на уменьшение и увеличение расхода подпиточной воды. Блок запрета управляется сигналами от блоков сравнения расхода подпиточной воды с установленными ограничениями, а также сигналами, формируемыми при сравнении текущего уровня воды с допустимыми отклонениями от заданного уровня. Алгоритм внедрен в составе АСУ ТП общецехового котельного оборудования.
Список литературы Алгоритм автоматического регулирования уровня воды в деаэраторе
- Бурмантов Д. Г., Ефимов С. Е., Коновалов В. И. и др. Система автоматического регулирования давления азота в емкости для хранения катализаторного комплекса с двумя управляющими воздействиями//Изв. Том. политехн. ун-та. 2010. Т. 316, № 5. С. 137-140.
- Шарапов В. И. Подготовка подпиточной воды систем теплоснабжения с применением вакуумных деаэраторов. М.: Энергоатомиздат, 1996.
- Денисенко В. В. ПИД-регуляторы: принципы построения и модификации//Совр. технологии автоматизации. 2007. № 1. С. 78-88.
- Рей У. Методы управления технологическими процессами. М.: Мир, 1983.
- Карташов В. Я., Сахнин Д. Ю. Структурно-параметрическая идентификация дискретных моделей объектов с запаздыванием для настройки регуляторов Смита//Изв. Том. политехн. ун-та. 2007. Т. 311, № 5. С. 19 -23.
