Алгоритм формирования сигналоподобных помех с использованием адаптивных фильтров

Бесплатный доступ
В статье рассматривается алгоритм формирования сигналоподобной помехи с применением адаптивного фильтра, коэффициент передачи которого подстраивается под спектр сигнала. Такая сигналоподобная помеха практически повторяет спектр полезного сигнала и значительно затрудняет его расшифровку.
Адаптивная модель сигнала, сигналоподобная помеха, формирующий фильтр, формирующий белый шум, моделирующий белый шум
Короткий адрес: https://sciup.org/14967024
IDR: 14967024
Текст научной статьи Алгоритм формирования сигналоподобных помех с использованием адаптивных фильтров
О дним из способов надежной защиты информации, которая циркулирует в выделенном помещении, является постановка помех, затрудняющих прием и расшифровку полезного сигнала. В этом случае широко используются различные генераторы шумовых помех, которые маскируют сигнал, затрудняя возможность у противника его обнаружения и выделения в приемном устройстве. При этом в условиях априорной неопределенности относительно параметров сигнала зачастую используются генераторы шума, излучающие помеховый сигнал достаточно высокой мощности и широкой частотной полосы.
В этой связи актуальной представляется разработка алгоритма формирования сигналоподобной помехи, которая могла бы генерировать помеху с минимально возможной мощностью и амплитудно-частотной характеристикой, повторяющей спектр сигнала.
Алгоритм формирования сигналоподобной помехи
В основе синтеза алгоритма формирования сигналоподобной помехи (рис. 1) лежит схема классического винеровс- кого фильтра. Основным отличием представленного алгоритма формирования сигналоподобной помехи является принудительное «примешивание» белого шума к полезному сигналу. В свою очередь, формирующий белый шум в смеси возбуждает N-мерное пространство весовых коэффициентов [1], а адаптивный фильтр 1 настраивается таким образом, чтобы его выходной сигнал соответствовал исходному процессу по критерию наилучшего среднеквадратического приближения.
В результате импульсная характеристика адаптивного фильтра 1 будет стремиться к соответствию с полезным сигналом. Передаточная функция адаптивного фильтра 1 в установившемся режиме согласно [2] определяется как:
км =
sxn sxwsM
где Sx(ω) – спектральная плотность полезного сигнала, Sυ(ω) – спектральная плотность формирующего белого шума.
Для того чтобы сформировать сигналоподобную помеху необходимо переписать весовые коэффициенты в адап-
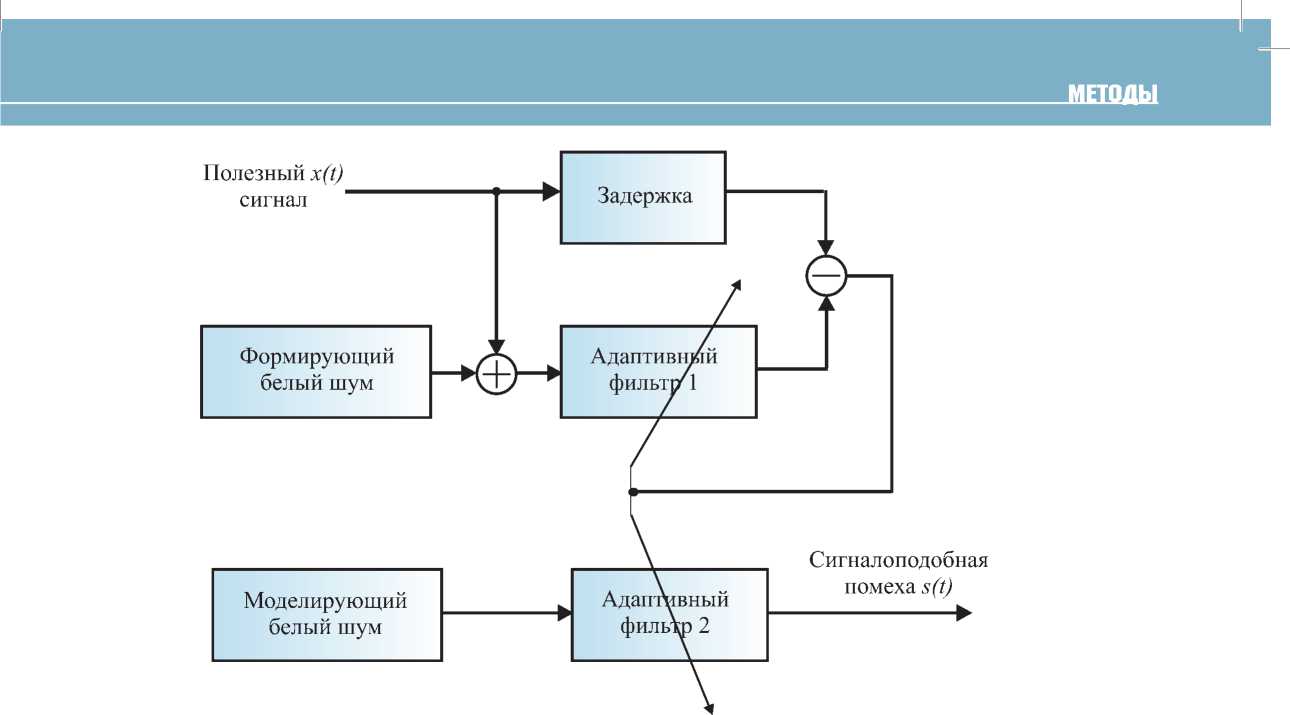
Рис. 1. Структурная схема формирователя сигналоподобной помехи
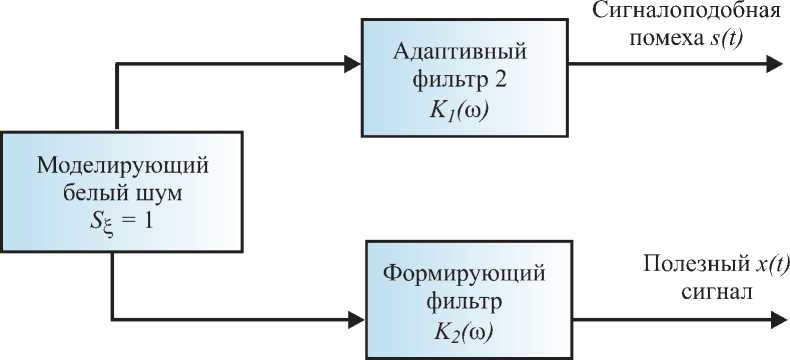
Рис. 2. Структурная схема устройства оценки адекватности модели
тивный фильтр 2, на входе которого действует «белый шум». Таким образом, на выходе такого адаптивного фильтра 2 генерируется сигналоподобная помеха, которая по сути является адаптивной моделью сигнала [3].
Определенный выбор задержки позволяет несколько снизить дисперсию ошибки моделирования сигналоподобной помехи. В [2] задержку рекомендуется выбирать равной половине длины адаптивного фильтра.
Для оценки адекватности (или качества) формируемой модели полезного сигнала [4] проведем оценку среднеквадратического отклонения временной реализации сигналоподобной помехи от временной реализации полезного сигнала в соответствии со схемой на рис. 2 .
Численно адекватность модели можно оценить по нормированному среднему квадрату ошибки:

где x(t) – временная реализация оценки полезного сигнала, s(t) – временная реализация сигналоподобной помехи, Ps – мощность сигналоподобной помехи, Px – мощность полезного сигнала.
Перейдем в формуле (2) к спектральным плотностям и получим:


f2(0
v /norm
з s(tMt)
7^7^"
= 2
-2 ----- ----- s(f) X^ _S2(t) X2(t) .
s
1--Д r-
р
×
^2a J
—7---dco cl' + co'
j
S^Kx
где Rsx – взаимная корреляционная функция сигналоподобной помехи и полезного сигнала, К2(jω) – ко эффициент передачи формирующего фильтра, Sξ – спектральная плотность мощности моделирующего белого шума.
Учитывая, что для стационарных входных сигналов спектральные плотности Sx(ω) и Sυ(ω) , входящее в выражение (1), есть неотрицательные и вещественные функции [5], то коэффициент передачи адаптивного фильтра также является неотрицательным и вещественным. Тогда коэффициент передачи формирующего фильтра K2(jω) можно принять равной квадратному корню из отношения спектральной плотности полезного сигнала к спектральной плотности моделирующего белого шума.
Поэтому, подставляя (1) в (3), окончательно находим
e\0 = 2 v / norm
×
--------Js (co)dco . s»+s>r
Пусть в качестве полезного сигнала выступает непрерывный гауссово-марковский процесс [6] со спектральной плотностью
^.(to)^
Аэ'2а a2 +co2
Тогда оптимальная передаточная функция адаптивного фильтра 1 представляется
KM =
2aq co2 +a2 +2aq
где q - отношение мощности марковского процесса и формирующего белого шума.
Подставляя спектральные плотности в выражение (4), получаем адекватность модели марковского процесса:
1 7 lag
.
Вначале найдем мощность модели марковского процесса:

2n
2aq co2 + a2 -v2aq
(agf
^2aq + a2y
Затем вычислим интеграл в выражении (7):

2aq co2 +a' +2aq
^2a j
^---dco = a' + co
Подставляя выражения (8), (9) в (7) получаем:
е\Л =2 v /norm
^2q + a + -^2^ ^2q + a -y/2q
Находим минимум выражения (10), продифференцировав
его по параметру q и приравняв полученное выражение к
нулю, a4
3 5
2nq- {2q + aY
× ^q-va^^2q-va - %-j2q- -4a^2q
Jl ^^. ^-^^1 ^.
Решая полученное выражение численными методами, определяем оптимальное отношение сигнал-шум q , при котором модель сигнала наиболее адекватна:
qonm-2,%6a =2^6-271^- где Δf – ширина полосы сигнала в Гц, fs – частота дискретизации в Гц.
Таким образом, оптимальным параметром формирования адаптивной модели полезного сигнала является отношение мощности полезного сигнала и формирующего белого шума q ( рис. 3 ).
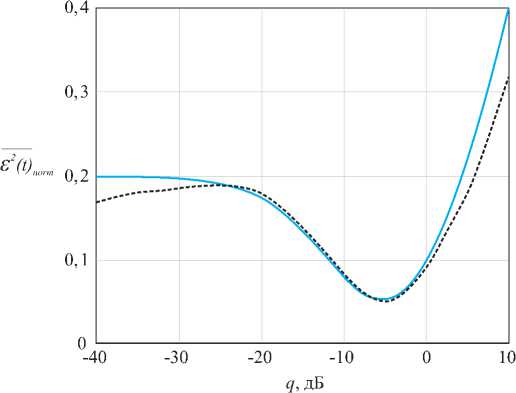
Рис. 3. Зависимость E (У) от q для марковского процесса при α = 0,1: теоретическая (сплошная) и моделируемая (пунктирная)
Компьютерное моделирование
Для оценки маскирующих свойств сигналоподобной помехи, сформированной предложенным алгоритмом, использу- ется устройство формирования оценки дисперсии ошибки фильтрации (рис. 4). В него входит генератор помехи, декоррелятор в виде нерекурсивного фильтра, адаптивный автокомпенсатор помех (АКП) [2], устройство оценки дисперсии ошибки фильтрации.
С помощью двухканального адаптивного автокомпенсатора и устройства оценки дисперсии ошибки фильтрации оценивается возможность обнаружения и выделения полезного сигнала (марковского процесса) при использовании в качестве помехи белого шума, марковского процесса, а также адаптивной модели марковского процесса.
Устройство формирования оценки ошибки позволяет моделировать работу адаптивного автокомпенсатора как в условиях действия коррелированных помех на обоих входах компенсатора, так и при их частичной (или полной) декорреляции. Декорреляция помех осуществляется декоррелятором, выполненным в виде нерекурсивного фильтра. Декоррелятор функционально необходим для создания условий, приближенных к реальной работе автокомпенсаторов. На вход устройства формирования оценки дисперсии ошибки фильтрации подается сигнал, к которому примешивается сформированная помеха. Смесь поступает на один вход автокомпенсаторов, а на другой помеха, частично декоррелиро-ванная с помехой в основном канале. По дисперсии ошибки проводится оценка работы автокомпенсаторов. Для удобства представления дисперсия ошибки определяется как где δ12 – нормированное к мощности полезного сигнала среднеквадратическое отклонение полезного сигнала от его оценки на выходе АКП.
С помощью разработанного программного обеспечения «Система адаптивной постановки помех» были получены зависимости дисперсии ошибки фильтрации полезного сигнала от отношения мощности сигнал-помеха, когда в качестве полезного сообщения использовался гауссово-марковский процесс, в качестве помехи - белый шум, гауссово-марковский процесс и адаптивная сигналоподобная помеха с разными коэффициентами взаимной корреляции помех в каналах ( r ).
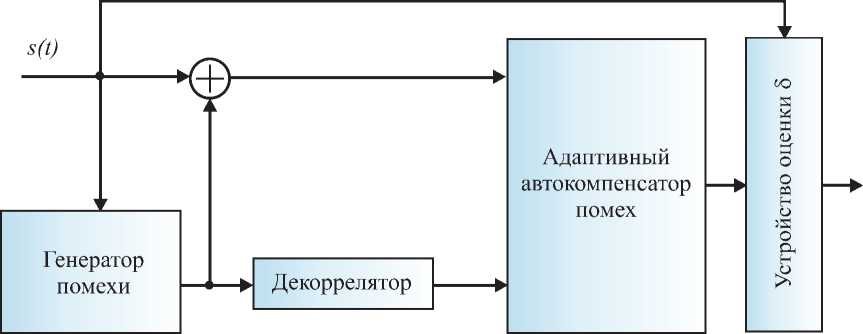
Рис. 4. Структурная схема устройства формирования оценки дисперсии ошибки фильтрации
Параметры моделирования отображены в табл. 1 , параметры сигнала и помех – в табл. 2 . Результаты моделирования изображены на рис. 5–8 . Измерение мощности сигнала и помех проводились в полосе Найквиста.
Таблица 1. Параметры моделирования
|
Параметр |
Значение |
|
Частота дискретизации ( fS ), Гц |
200000 |
|
Объем выборки для оценки δ2 |
65536 |
|
Количество выборок для усреднения δ2 |
10 |
|
Число весовых коэффициентов АКП |
2048 |
|
Коэффициент адаптации АКП |
0,01 |
|
Алгоритм адаптации АКП |
метод наименьших квадратов [2] |
П, дБ
Рис. 6. Зависимость нормированной дисперсии ошибки фильтрации от отношения мощности сигнал-помеха в условиях действия адаптивной помехи (сплошная) и марковской помехи (штрихпунктирная) при коэффициенте взаимной корреляции помех r = 0,99
Таблица 2. Параметры сообщения и помех
|
Тип |
Параметры |
|
Марковский процесс |
ширина полосы = 3354 Гц |
|
Адаптивная помеха |
длина адаптивной модели L = 128 ; коэффициент адаптации M = 0,01; отношение с/ш qопт = -5дБ; алгоритм адаптации – метод наименьших квадратов [2] |
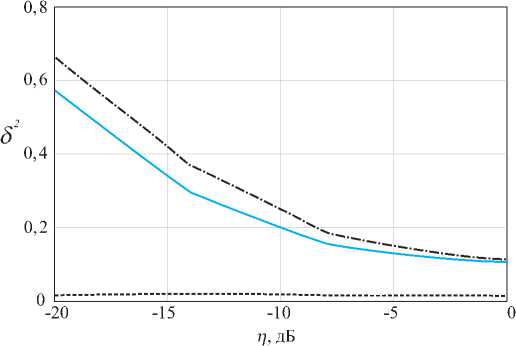
Рис. 5. Зависимость нормированной дисперсии ошибки фильтрации от отношения мощности сигнал-помеха в условиях действия адаптивной помехи (сплошная), марковской помехи (штрихпунктирная) и белого шума (пунктирная) при коэффициенте взаимной корреляции помех r = 1
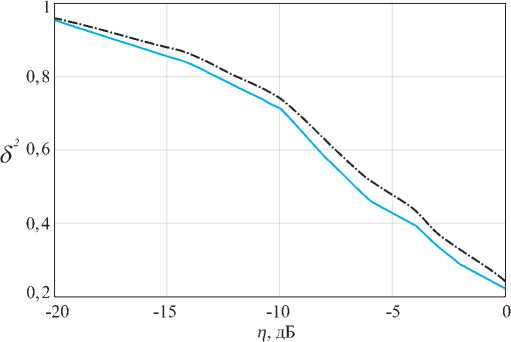
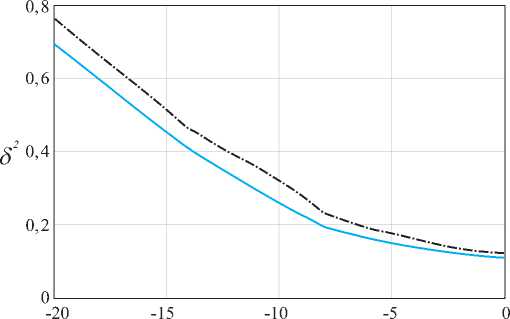
Рис. 7. Зависимость нормированной дисперсии ошибки фильтрации от отношения мощности сигнал-помеха в условиях действия адаптивной помехи (сплошная) и марковской помехи (штрихпунктирная) при коэффициенте взаимной корреляции помех r = 0,88
Анализ рис. 5 - 8 свидетельствует о высокой эффективности постановки адаптивной помехи, сформированной на основе алгоритма формирования адаптивных моделей случайных процессов. Данный алгоритм позволяет сформировать сигналоподобную помеху, по спектральной плотности мощности совпадающей с сигналом и с минимально возможной мощностью помехи.
Алгоритм формирования адаптивной модели полезного сигнала позволяет получать сигналоподобную помеху по эффективности значительно выше, чем широкополосный шум и при небольшом проигрыше марковской помехе. В частности, при единичном коэффициенте корреляции помех в каналах и отношении мощности сигнал-помеха рав-
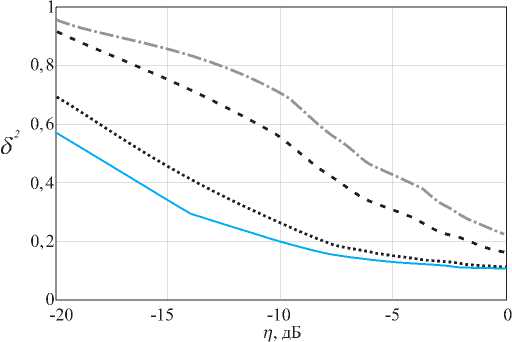
Рис. 8. Зависимость нормированной дисперсии ошибки фильтрации от отношения мощности сигнал-помеха в условиях действия адаптивной помехи при коэффициенте взаимной корреляции помех r = 1 (сплошная), r = 0,99 (точечная), r = 0,95 (пунктирная), r = 0,88 (штрихпунктирная)
ном -15дБ, дисперсия ошибки фильтрации для белого шума составляет 0,02, для марковской помехи – 0,42, тогда как для сигналоподобной помехи – 0,35, что позволяет сигналоподобной помехой «накрывать» полезный сигнал при меньших ее уровнях по сравнению с широкополосной помехой.
Чтобы обеспечить дисперсию ошибки фильтрации 0,4 при использовании сигналоподобной помехи экономия мощности по сравнению с белым шумом составляет более 20 дБ, а проигрыш марковской помехе составляет всего 3 дБ
Список литературы Алгоритм формирования сигналоподобных помех с использованием адаптивных фильтров
- Neil J. Bershad, Jose Carlos M. Bermudes. Sinusoidal interference rejection analysis of an LMS adaptive feedforward controller with a noisy periodic reference/IEEE Transaction on signal processing, May 1998. -Vol. 46. -№ 5.
- Уидроу Б., Стирнз С. Адаптивная обработка сигналов/Пер. с англ. -М.: Радио и связь, 1989. -440 с.
- Манохин А.Е. Идентификация случайных процессов на основе формирования их адаптивных моделей/Журнал научных публикаций аспирантов и докторантов, № 9 -Курск: изд. ООО «Редакция Журнала научных публикаций аспирантов и докторантов», 2008. -с. 238 -241.
- Основы теории систем и системного анализа. Учебное пособие для вузов. -М.: Горячая линия -Телеком, 2007. -216 с.: ил.
- Денисенко А.Н. Сигналы/Теоретическая радиотехника. Справочное пособие. -М: Горячая линия -Телеком, 2005. -704 с.: ил.
- Тихонов В.И., Харисов В.Н. Статистический анализ и синтез: Учеб.пособие для вузов. -М.: Радио и связь, 2004. -608 с.: ил.
