Алгоритм функционирования имитационной модели процедуры калибровки инерциальной навигационной системы

Автор: Щипицына Мария Анатольевна
Статья в выпуске: 3 (103), 2008 года.
Бесплатный доступ
Короткий адрес: https://sciup.org/147154641
IDR: 147154641 | УДК: 629.7
Текст статьи Алгоритм функционирования имитационной модели процедуры калибровки инерциальной навигационной системы
В работе [1] выполнено математическое описание для процедуры калибровки инерциальной навигационной системы (ИНС) на движущемся объекте относительно вращающейся Земли. Следуя методу этой работы и использованным в ней обозначениям, но принимая основное допущение о том, что ИНС-А и ИНС-В функционально можно разделить на три подсистемы, каждая из которых представляет собой одноосную стабилизированную в инерциальном пространстве площадку и установленные на этой площадке два взаимно ортогональных акселерометра, расположенных в плоскости, перпендикулярной оси площадки, найдем решение задачи для одной такой подсистемы, т.е. частной задачи. Изменяя ориентацию оси площадки путем циклической перестановки, получим решение общей задачи для платформенных ИНС-А, ИНС-В.
. 1. Постановка задач
Платформенные эталонная ИНС-А и калибруемая ИНС-В установлены на объекте так, что начала связанных с ними системы координат (СК) совпадают с заданными точками ОА, Ов объекта (рис. 1).
Рис. 1. Расположение на объекте ИНС-А и ИНС-В
Модели погрешностей площадки и акселерометров ИНС-В имеют вид:
^ = pg+pQa®+pQa®; (1)
А^-^+^-ь^, (2)
где а® - проекции вектора кажущегося ускорения в СК Z® связанной с площадкой ИНС-В; Р^, Ру , z = 1, 2; у = 0, 2 - подлежащие определению калибровочные коэффициенты (КК), являющиеся постоянными.
Движение объекта в плоскости OzZxZ2, связанной с Землей СК, задано функциями:
q(f) = ае sin coz, te [Zo, Г]; (3)
W;(t) = ai2t2 + a,y, z = 1, 2; Ze[Zo, T], (4)
где q - угол поворота вокруг оси Z3, перпендикулярной плоскости движения, W, - проекции вектора ускорения точки Оу - объекта на оси СК Z.
Задача заключается в разработке:
-
• имитационной модели (ИМ) для процедуры определения КК площадки и акселерометров ИНС-В и составлении алгоритма функционирования этой ИМ;
-
• алгоритма определения КК для ИНС-В на основе заданной априорной информации о величине гравитационного ускорения, измерений: сигналов датчиков углов ИНС-А QA = q, ИНС-В Q®, сигналов акселерометров ИНС-А Аа = ах, сигналов акселерометров ИНС-В А®.
Поставленные задачи будем решать при допущениях:
-
• не учитываем вращение Земли;
-
• гравитационное поле в объеме объекта является одинаковым во всех его точках.
-
2. Математическое описание для решения поставленных задач
Модель погрешности площадки (1) представляет собой дрейф (уход) площадки от идеальной стабилизации в горизонтальной плоскости, определяемой площадкой ИНС-А, а поэтому на основе Аб необходимо определить Аб. А так как количество неизвестных КК площадки ИНС-В равно трем, то нужно иметь величины Аб, определенные для трех разных моментов времени, и для определения КК площадки следует использовать систему уравнений
- ^ + Р?«п + Р?а®1 = Аб2; (5)
pQ+pQa®3+p2a®3=^3.
В рассматриваемой задаче принято А0 = (sin 6s -sin<7)/cos<7, где q = QA.
Найдем решение системы (19) в виде:
pQ = D^/ Dq , j = 0^2, (6)
где D^ - определитель системы; D^ - определитель, получаемый из D^ заменой элементов у-го столбца свободными членами системы.
Для решения задачи по определению КК акселерометров ИНС-В в качестве исходной информации используем известные векторные равенства, выражающие зависимости векторов ускорений точек Од, Ов твердого тела от ускорения точки Оу этого тела (в нашем случае - объекта):
WA =^ + ехЛл+Пх(ох^), (7)
WB = ^ + exZb+Qx(qxZs), (8)
где W — вектор ускорения точки Оу объекта; Q, е - векторы угловой скорости и углового ускорения объекта соответственно; LA =OYOA, LB =OYOB - радиус-векторы положения точек Од, Ов относительно ТОЧКИ Оу (рис. 1).
WA = AA + g; (9)
WB=AB+g, (10)
где, согласно допущению, g - вектор гравитационного ускорения любой точки объекта; Аа, Ав - векторы кажущихся ускорений точек Од, Ов объекта.
Обозначим символами WA, WB вектор W, входящий соответственно в первое и второе полученные равенства, фиксируя этими обозначениями факт «определения» этого вектора на основе информации соответственно с ИНС-А, ИНС-В. Критерием неидеальности является вектор kW = WB-WA.(11)
С учетом (9), (10) перепишем (7), (8):
ЙД = Лл+5-ДД-Пх(пхД?),(12)
^s=Hs+5-e^Zb-Qx(qxZ5).(13)
После записи векторных равенств (12), (13) в скалярной форме, получим (j= 1,2):
MV, = Y.H^A8-at-WB = WB-WA, (14)
2=1
где
W.L = lf(HAE-HAn2)-IAB(HAQ2 + Hae), (15) La, Lb, g, - заданные величины, Я, e - вычисляемые величины на основе измерений угла QA =q датчиком угла ИНС-А путем дифференцирования по времени:
Я = 9; (16)
е = £ (17)
На основе сравнения этих величин можно определить выражения для М.8 , после чего можно определить КК акселерометров ИНС-В.
Сигналы Ав акселерометров ИНС-В имеют погрешности Мв, что можно записать в виде:
Ав=ав+Мв, (18)
где ав — точные значения проекции вектора кажущегося ускорения точки Ов объекта в СК 2s, входящие в выражения моделей (1), (2).
Тогда из (14) получим:
№» =
2=1
= а, -ЦН^вав + АЖ, +^£, z = 1, 2. (19)
2=1
Уравнения (19) запишем в виде:
Н^\АВ + НАВ^ = Fx;
Н^М^ + Н^М2 = F2, где F, = Аб, cos q,.
Решив эту систему, найдем:
;mb=habfx-habf2, мв =h^f2-habfv где
Р,=а, + MV, + W8-(^H^ ав + НДва2), / = 1,2. (21)
Имеет место векторное равенство:
а8 =аА -exL48 -Qx^xL48), (22)
которое в скалярной форме есть: 2
a8 ^H^aj+W8, i = 1,2. (23)
2=1
Таким образом, правые части уравнений (2) известны.
Найдем КК акселерометров ИНС-В, используя переобозначение:
Ы^М8, i = 1,2. (24)
Используем уравнения (2), где величины АЛ, определены для трех разных моментов времени tk, k = V3.
P^P^Pn^^
.РА*РАав2+РАав2=^2, (25)
^о + ЛДв + ^з = Мз> * = 1- 2.
Найдем решение систем (25) в виде:
рА = d^ ]da , z = 1, 2, j = оД. (26) где Da - определитель системы; DA - определитель, получаемый из DA заменой элементов у-го столбца свободными членами системы.
-
3. К решению задачи разработки имитационной модели процедуры определения КК ИНС-В
Для решения задачи разработки ИМ определения КК необходимо задать:
Алгоритм функционирования имитационной модели процедуры калибровки...
-
• модели (имитаторы) измеренных величин: сигналов датчиков углов и сигналов акселерометров ИНС-А, ИНС-В;
-
• модели (имитаторы) определяемых КК площадки и акселерометров ИНС-В;
-
• критерии точности определения КК.
Модели сигналов датчика угла площадки и акселерометров ИНС-А зададим в виде:
QA = q = a? sin co/; (27)
a; = ai2/2 + an/ -g„ z = 1, 2. (28)
Для задания сигналов датчика угла площадки и акселерометров ИНС-В необходимо вначале задать соответствующие модели погрешностей дрейфа площадки
Аб5 = Р^ + Р^ ав + Р^ ав, (29)
где Р®, j = 0, 2 - модели (имитаторы) КК площадки ИНС-В, и акселерометров:
АД- ^ М= = РА + РАах + РАа2, z = 1, 2, (30)
где Ру , / = 1, 2, у = 0, 2 - модели (имитаторы) КК акселерометров ИНС-В.
Модель погрешности для угла площадки ИНС-В имеет вид:
Ag5=Ag5(/0)+jAg5(/)^/,(31)
<0
а значит, модель сигнала датчика угла площадки ИНС-В:
QB=q^QB.(32)
Имея (30), можно определить модели сигналов акселерометров ИНС-В
Ав = aB+Mj, i = V2.(33)
В качестве критериев точности определения КК введем величины относительных погрешностей КК:
S? = |pf - pQ\/pf ,j = 6/2;(34)
Sy = |^ - Py \!p^, i = 1, 2, j = 5Д, (35) где в качестве эталонных значений выступают заданные модели (имитаторы) КК: Р~, Ру .
Введем величины вида: 1 2
1 2 2
^=тЕ2Х (37)
° 1=1 у=0
представляющие собой средние арифметические величины относительных погрешностей всех КК площадки (5е) и относительных погрешностей всех КК акселерометров (5^) и принимаемые в качестве обобщенных критериев точности алгоритма функционирования имитационной модели (ИМ) процедуры калибровки.
-
4. Решение задачи разработки алгоритма функционирования ИМ процедуры определения КК
Предполагаем, что:
-
• процедура калибровки ИНС-В начинается сразу после окончания процедуры выставки ИНС-В на основе информации с ИНС-А;
-
• в первую очередь осуществляется калибровка акселерометров ИНС-В, а затем - калибровка площадки ИНС-В;
-
• калибровка акселерометров осуществляется за малое время. В этом случае можно допустить, что в течение всего интервала времени калибровки акселерометров ориентация площадки ИНС-В совпадает с ориентацией площадки ИНСА, а значит, в этом случае Ад = 0.
Определим значения исходных параметров.
Значения моделей КК площадки ИНС-В зададим такими, чтобы выполнялись условия:
l^+peg+^I^Ag,,(38)
где Ад, - заданная модельная величина дрейфа (ухода) площадки ИНС В. Из (38):
Рое=1/ЗАд„ (с4);
■^ = l/3-Ag./g, (с/м);(39)
pQ=\l3AQ,lg, (с/м).
Значения моделей КК акселерометров ИНС-В зададим из условий l^o+^g + T^AA,(40)
где ДА. - заданная модельная величина абсолютной погрешности измерения ускорения. Из (40)
7$ =1/3 АД, (м/с2);
• Р^ = 1/3-АД/g, (безразмерная);(41)
Р^ = 1/3 ■ АД /g, (безразмерная).
В качестве исходных параметров о проекциях вектора кажущегося ускорения целесообразно иметь средние значения соответствующих проекций на интервалах времени [0; /2], [0; /3], т.е. величины вида
4 = — J^ (t)dt, z = 1,2, к = 2,3. (42)
tk о
Подставив (28) в (42), получим:
^ =— [(ai2f2+ant-g,)dt,
*к 0
ИЛИ aik ~ ^Ьк ^l^^il^k ^V^^iAk ~ SAk) ’
ИЛИ
<4 = l/3a,2/2 +l/2an/t -g„ i = 1,2, к = 2,3. (43)
Полагая к = 2, 3, запишем (43):
(1/3 /j) a,2 + (1/2 /2 ) a„ = <4 + g,;
1 (44)
(1/3 /32) a,2 + (1/2 /3 ) ал = 4 + g,.
Решая систему (44) относительно а/ь а(2, получаем а^.=^/^,(45)
где обозначено:
^оо ="" 1/6 (?з - ?2 ) ^з;(46)
D” ^Z2^ +g,)-l/2/3^ ^(47)
D=» =1/2/3(^ + g,)-l/2/2(^ + g,).(48)
Если ввести коэффициенты кратности g, то 4=^g, / = 1,2, ^ = 2,3.(49)
Задавая К^, вычисляем а^ по формулам (49), затем вычисляем D^, D^ по формулам (46)-(48) и находим коэффициенты а,у, необходимые для получения модели сигналов акселерометров ИНС-А.
Алгоритм функционирования ИМ процедуры определения КК представляет собой последовательность действий:
-
1. Задать: g - модуль g (м/с2); Го = 0 - начальный момент времени (с); tx, t2, t3 - первый, второй, третий моменты времени (с); Т - конечный момент времени; NB , NL- количество точек решения, вывода; ае - амплитуда угловых колебаний (рад); со -частота угловых колебаний (с-1); KS, KS, К22, к^ (-); 1^, ^, iL 4 (м); Р^, (с"1); Р?, Р^ (м/с); РАй , Р21, (м/с2); Д4 , РА , Р^ , /% Н-
-
2. Д/ = (Г-/О)/АВ; 4 по (49); D^, D^ DS по (46)-(48); ау по (45); LAB=LB-LA, / = 1, 2; t = t0.
-
3. AQB =0, Ag = 0.
-
4. tp = t + Дt, tpp = t + 2M
-
5. 9=a^sinco/, qp =a-sino)Z/,, qpp=a~ s\ntotpp no (27); a, no (28).
-
6. ^^p-q^At; £ = ^Pp-2qP+qV^t)2 (численное дифференцирование (ЧД)), HAX = cosq, НА2 = -sin q, H2X = sin q, HA22 = cos q,
-
7. HB = ^ H^HA , i, j = 1, 2; W® no (15). m=l
-
8. a® no (23).
-
9. A^5, A4, no (29), (30).
-
10. AQB =^в+ДбВМ (ЧД).
-
11. QB =q + kQB; Л® =ав +M,, z = l, 2 no (32), (33).
-
12. Ag = (sin QB - sin ^)/cos q; W,A , WB ,
-
13. ^Wl=Wв-WlA, / = 1,2; F, no (21).
-
14. A^ no (20).
-
15. t = / + А/, tp = Z + AZ , tpp = 1тШ
-
16. <7 = a^sinco/, q„ =aesinoyn, o„=aesin(nZm no (27).
-
17- Q =
p-q)/^; E = (qpp-2qp+q^(&tf; Hxx
= cos q, HA2=-sm.q, H2X=smq, H22=cosq; ^^s=cos(A0, H^ = -sin(A0, H2^=sin(Ag), H^ =cos(A0. -
18. HB = ^H^HA, i,j = l,2; W^, a, no m=l
-
19. aB no (23).
-
20. A^5 no (29).
-
21. A0S =AgS+Ag5A/ non. 10.
-
22. QB =q + ^QB non. 11.
-
23. AQp =(sinQB -smq)/cosq.
-
24. дё = (ддр-дд)/м (чд).
-
25. Если (/>/,-0,5A/) и (/
x +0,5А/), то Ай =Аё; ДА1 =М; 4 =аВ, / = 1, 2. -
26. Если (/>/2-0,5А/) и (/
2 +0,5А/), то Д0 =АЙ; М,2 =МХ; ав=ав, i = l, 2. -
27. Если (/>/3-0,5А/) и (t
3 +0,5А/), то дёз =Аё; Мз =М; ^з =«Л 1 = 1, 2. -
28. t = t + M.
-
29. Если t < Т, то п. 4.
-
30. pQ, Р^ по (6), (26).
-
31. Sf, S^ по (34), (35).
-
32. SQ, SA по (36), (37).
-
33. Вывести: pQ, S^, SQ, P^, S^, SA.
-
34. Закончить.
H® = cos(A0, H^ = -sin(A0, H^ = sin(A0, HAB =cos(A0.
A^, no (14).
(15), (28).
Заключение
На основе этого алгоритма разработана программа, реализующая имитационную модель процедуры определения КК для трехосной стабилизированной платформы (ТСП) и трех акселерометров ИНС-В (рис. 2), на вход которой подается информация о номерах акселерометров (z), а значит, и об ориентации оси площадки, о проекциях вектора гравитационного ускорения (G/) и проекциях радиус-векторов начал связанных с ИНС-А, ИНС-В систем координат (Д), моделях сигналов датчиков углов
Алгоритм функционирования имитационной модели процедуры калибровки...
ИНС-А, ИНС-В (qb Q) и моделях сигналов акселерометров ИНС-А, ИНС-В (а„ А), а выход которой -величины КК платформы и акселерометров (рис. 3).
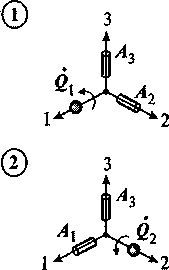
Аё^+^2+^3;
-
- АЛ2 = Тэд + ^22а2 + р23а3’ АА3 = Р30 +^32^2 + Р33а3.
^Ог = ^20 + ^а1+ ^а3’
-
• АЛ, = /jo + 7ц а3 + 71з аз >
А^з = Р30 + Р31 ^1 + Тзз а3.
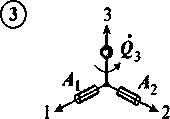
'^Р^Р^М-Р^, " ^А = ^10 + ^ а1 + ^12 а2 ’
А^2 = ^20 + ^21<21 + -^22а2-
Рис. 2. Варианты установки датчиков и математические описания для подсистем 1, 2 и 3
Список литературы Алгоритм функционирования имитационной модели процедуры калибровки инерциальной навигационной системы
- Щипицын А.Г. Математическое описание для процедуры калибровки инерциалъной навигационной системы/А.Г. Щипицын//Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». 2007. Вып. 5, № 7(79). С. 52-61.
- Лурье А.И. Аналитическая механика/А.И. Лурье. М.: ГИФМЛ, 1961. 824 с.
