Алгоритм идентификации параметров динамической системы второго порядка с малыми возмущениями по экспериментальным данным

Автор: Горшунова Т.А., Стенин И.В., Шаманаев П.А.
Журнал: Огарёв-online @ogarev-online
Статья в выпуске: 10 т.7, 2019 года.
Бесплатный доступ
Задача идентификации параметров линейных динамических систем второго порядка с малыми возмущениями по экспериментальным данным решается путем сведения ее к задаче минимизации квадратичного функционала с ограничениями в виде нелинейных алгебраических уравнений. Проведены вычисления на трех экспериментальных наборах данных, соответствующих трем типам особой точки линейной системы: седло, узел, центр.
Идентификация параметров, минимизация, обыкновенные дифференциальные уравнения
Короткий адрес: https://sciup.org/147249653
IDR: 147249653 | УДК: 519.6
Algorithm of Parameter Identification of Second-Order Dynamical System with Small Perturbations According to Experimental Data
The problem of identifying the parameters of the second-order linear dynamical systems with small perturbations according to experimental data is solved by reducing it to the problem of minimizing a quadratic functional with constraints in the form of nonlinear algebraic equations. The calculations were carried out on three experimental data sets corresponding to the three types of singular points of a linear system: the saddle, the node, and the center.
Текст научной статьи Алгоритм идентификации параметров динамической системы второго порядка с малыми возмущениями по экспериментальным данным
Рассмотрим линейную систему обыкновенных дифференциальных уравнений c малыми возмущениями вида
[ lu = 9 1 X 1 + 92X2 + ^ 1 X 1
= 93X1 + 94X2 + £2X2
где X f E R, i = 1,2 - зависимые переменные, t 6 [0, b] - независимая переменная, b > 0,
9k E R, к = 1,..., 4 - неизвестные параметры, ej (j = 1,2) - достаточно малые вещественные параметры.
Обозначим через X j (t, 9) - j-компоненту решения системы (1), j = 1,2, зависящую от векторного параметра в = column^, 9 2 ,9 3 ,9 4 ).
Пусть при некоторых фиксированных значениях вк , к = 1, .,4 , решение системы (1)
удовлетворяет задаче Коши с начальными условиями:
x(1) = х1(0), х(1) = х2(0).(2)
Пусть так же по переменной х с шагом i = ^ на равномерной сетке ti = 0,.,ti+i = ti+i,.,tN = Ь,(3)
для экспериментальных данных справедливы соотношения
X(t) = x(f) + e(t), i = 1,...,N,(4)
где х(} = column(x(\x(f'), х® = column^x® ^W) х^1 = Xj(ti, в) - значение компоненты решения системы (1) в точке tf при фиксированном значении векторного параметра в, e(i = column(eii,. ,eiN) - вектор, элементы которого являются случайными величинами, имеющими стандартное нормальное распределение, то есть eij Е N(0,1), i = 1,N, j = 1,2.
Ставится задача идентификации параметров системы вида (1), заключающаяся в нахождении таких оценок вк параметров вк , к = 1, .,4, при которых решение задачи (1) приближается экспериментальными данными {x(i), i = 1,N} в смысле метода наименьших квадратов [1].
Заменим уравнение (1) симметричной разностной схемой [2] на сетке (3)
у (i + i)_r(i) ХX
т у (i+i')
х2
т
= 2 (fi,i + f i+i,i ),
1(f.^f.
= 2 \fl2 + fl+1,2), i = 1,N -1, где fi,i = fi(x(l'), в) = eiX(i) + в2х21) + eiX^, fi,2 = f2(x(l\в') = взХ^ + в^ + е2х21\
Вводя обозначения [3]
z = column(x (N\ в ), x(N) = column(x (1 \ ..,х (А/) ),
Z = column(x (N\ o4 ), x (N) = column(x (1') , .„,X(N)), o4 - нулевой вектор размерности 4, получим
x(N) = Hiz, x(N) = HiZ, где
H1 — [I2N : 02Nx4], ^2 = ^^1^1, здесь I2N - единичная (2N x 2М)-матрица, 02Nx4 - нулевая (2N x 4)-матрица.
Тогда, согласно [3-5], задача идентификации параметров может быть сформулирована как задача минимизации квадратичного функционала с ограничениями в виде нелинейных алгебраических уравнений
{ min m(z), m(z) — | (H2z, z) — (H2z, z)
T(z) — h . (6)
g(z) — о
Здесь введены следующие обозначения: T — [T 1 T2, . ,TN,Te] - (2 x (2N + 4)) -матрица, T^, i — 2,N - нулевые (2x2) - матрицы, Tq - (2x4) - матрица;
g(z) — column^^,...,g N (z~) ), g i (z) — column(gn(z),g i2 (z)), i — 1,N, gM — gu(xw,9) =
= (1+^1 + £1)) X? +102*2l) — (1 — I (^1 + £1)) x(l+1) + 102X(l+1), (7)
g^z) — g i2 (xw,e) =
= | в3х1П + (1+1(0 4 + 1 2 )) X® +1 в з Ха+' > — (1—1( в 4 + £ 2 ) X™. (8)
Заметим, что разностная схема (5) с учетом обозначений (7)-(8) может быть записана в виде
g(z) — 0.
Для решения задачи (6) воспользуемся алгоритмом [3], основанным на аппроксимации исходной задачи последовательностью квадратичных задач минимизации с линейными ограничениями. На каждом шаге разреженная система линейных алгебраических уравнений большой размерности решалась с использованием метода сопряженных градиентов [4].
Вычисления проводились на трех наборах экспериментальных данных X(l), i — 1,N, отличающихся от приближенных решений с начальными данными х 1 (0) — 1, x2(0) — 1 системы (1) на случайные величины £ ij EN(0,1) (j — 1,2), имеющие стандартное нормальное распределение. Каждое приближенное решение системы (1) получено при фиксированном наборе параметров 0 ^ , к — 1, .,4, соответствующих трем типам особой точки системы (1): седло, узел, центр. Точность вычислений 8 полагалась равной 0.001.
В результате вычислений для трех различных наборов экспериментальных данных получены оценки 0 к для параметров 0 ^ , к = 1, ...,4, а также компоненты x1(t,0), x2(t,0) приближенных решений системы (1) .
Приведем графики компонент x1(t,f0), x2(t, 0) приближенных решений системы (1) и соответствующие им экспериментальные данные.
Случай 1. Нулевое положение равновесия системы (1) – седло.
Получены следующие оценки параметров 0 1 , 0 2 ,0 3 ,0 4 :
0 1 = 2.02298, 02 = 0.0001, 0 3 = 0.00 0 02, 04 = -2.90 0 02..
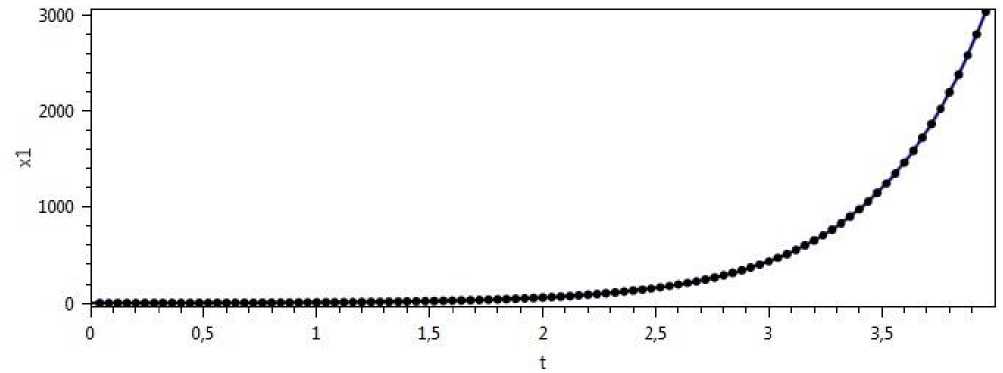
Рис. 1. Экспериментальные данные и график компоненты x 1 (t, 0) приближенного решения системы (1).

0 -
О 0,5 1 1,5 2 2,5 3 3,5
t
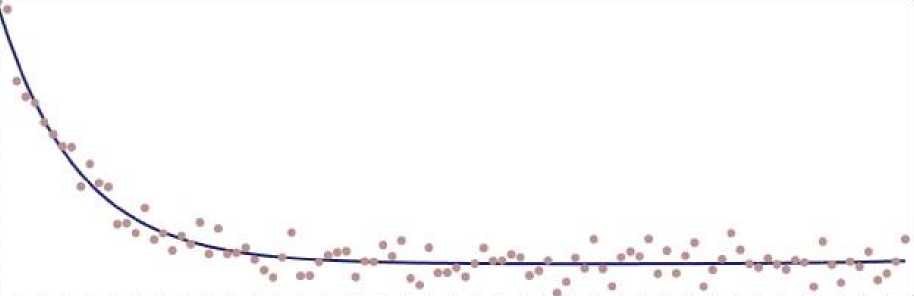
Рис. 2. Экспериментальные данные и график компоненты x2(t, 0) приближенного решения системы (1).
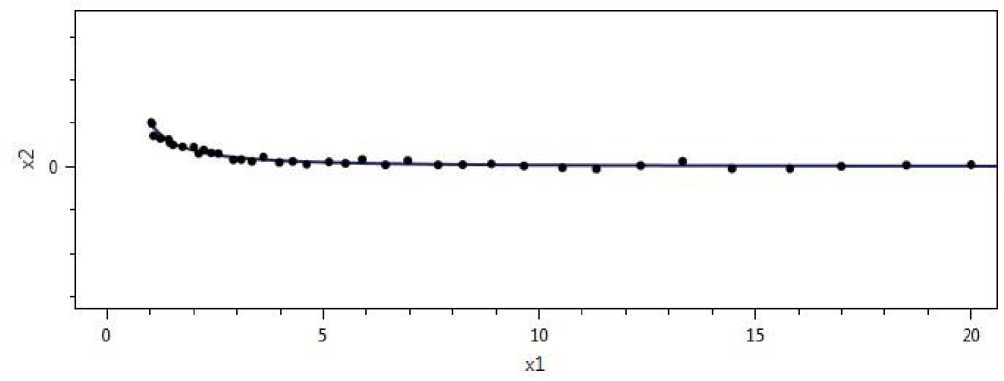
Рис. 3. Экспериментальные данные и приближение фазовой траектории системы (1)
с начальными данными х 1 (0) = 1, % 2 (0) = 1.
Случай 2. Нулевое положение равновесия системы (1) – узел.
Получены следующие оценки параметров 3 1 ,3 2 ,6 3 ,6 4 :
0! = -3.14132, 32 = 0.01895, З3 = 1.03559, 04 = 0.02129.
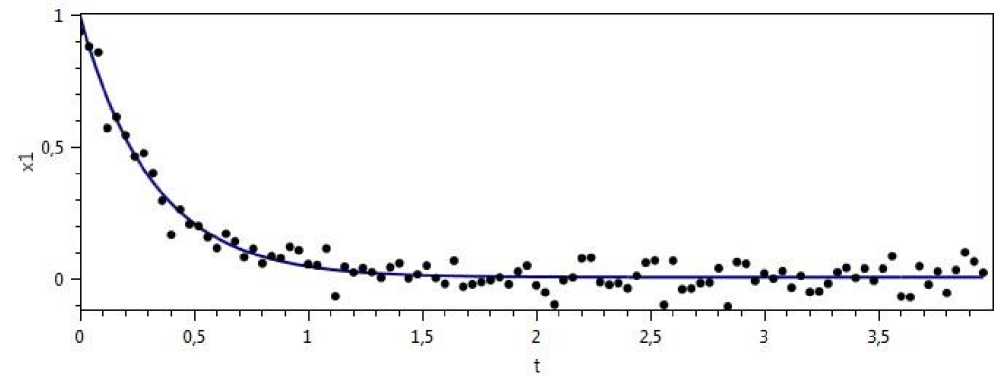
Рис. 4. Экспериментальные данные и график компоненты ^(t, 0) приближенного решения системы (1).
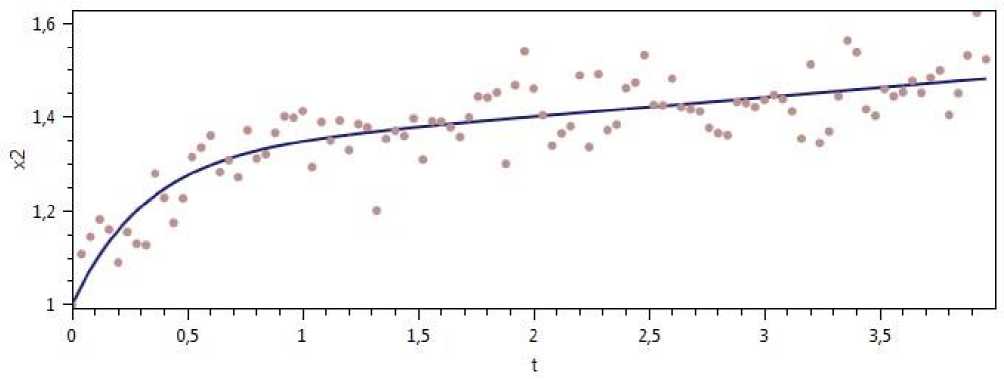
Рис. 5. Экспериментальные данные и график компоненты % 2 (t, 0) приближенного решения системы (1).
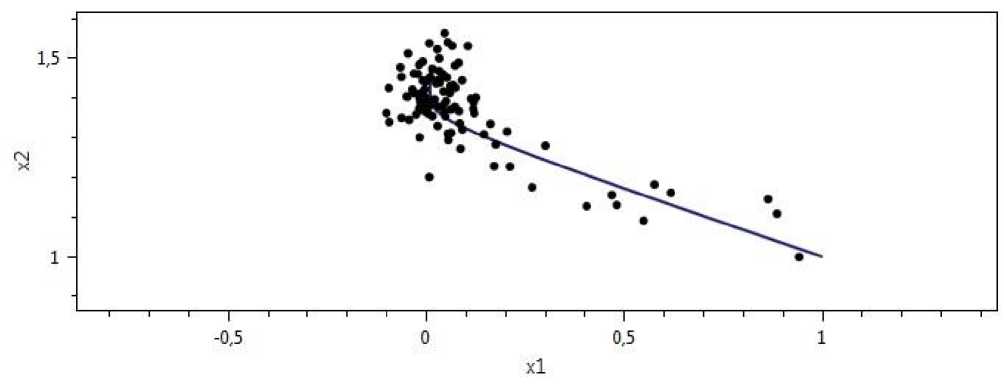
Рис. 6. Экспериментальные данные и приближение фазовой траектория системы (1) с начальными данными % 1 (0) = 1, % 2 (0) = 1.
Случай 3. Нулевое положение равновесия системы (1) – центр.
Получены следующие оценки параметров 6 1 ,0 2 ,03,0 4 :
01 = 0.072 74, 02 = 4.01077, 03 = -3.98702, 04 = -0.02925 .
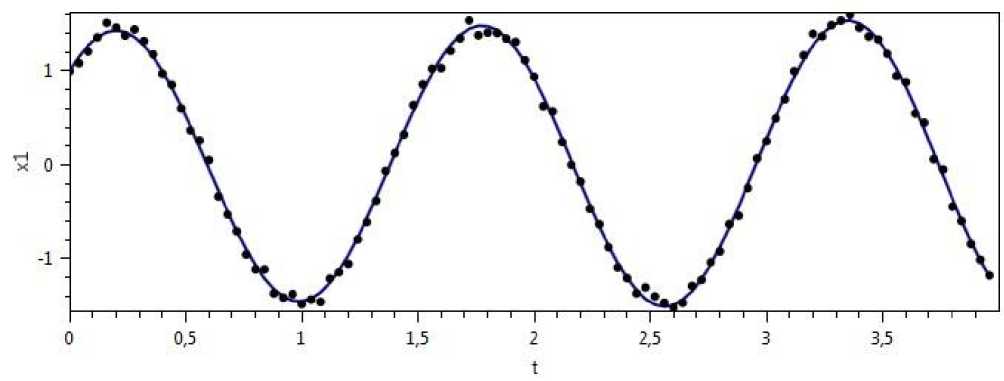
Рис. 7. Экспериментальные данные и график компоненты x 1 (t, 0) приближенного решения системы (1).
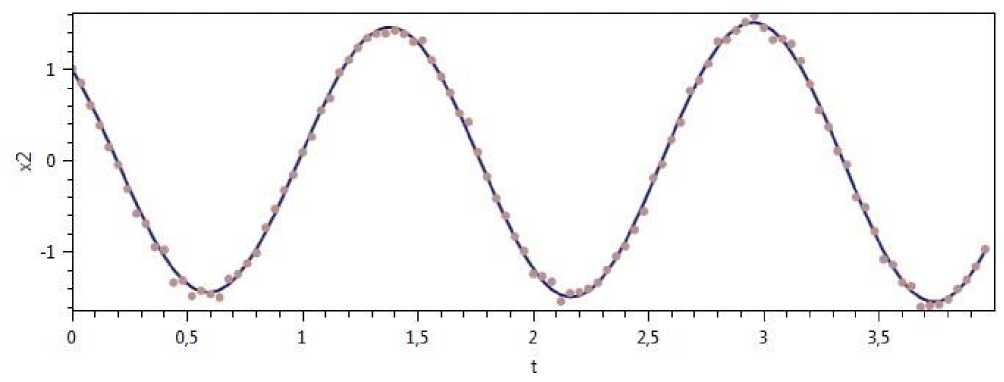
Рис. 8. Экспериментальные данные и график компоненты x2(t, 0) приближенного решения системы (1).
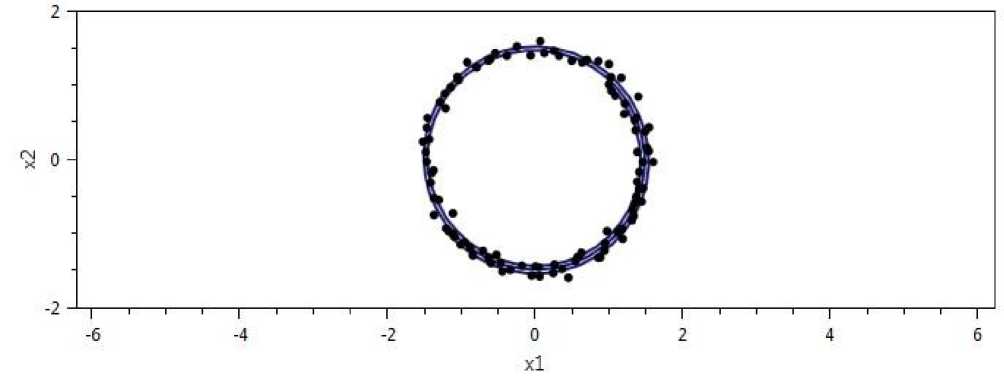
Рис. 9. Экспериментальные данные и приближение фазовой траектории системы (1).
Список литературы Алгоритм идентификации параметров динамической системы второго порядка с малыми возмущениями по экспериментальным данным
- Zhengfeng Li, Michael R. Osborne, Tania Prvan. Parameter estimation of ordinary differential equations//IMA Journal of Numerical Analysis. -2005. -No. 25. -Р. 264-285. EDN: IPUUOH
- Самарский А. А., Гулин А. В. Численные методы. -М.: Наука, 1989. -432 c.
- Челышов М. С., Шаманаев П. А. Решение задачи идентификации параметров динамических систем с использованием метода ортогональной циклической редукции//Прикладная математика и механика: сб. научных трудов. -№ 11. -Ульяновск: УлГТУ, 2017. -С. 264-271. EDN: YUZDXV
- Стенин И. В., Шаманаев П. А. Алгоритм решения разреженной системы линейных алгебраических уравнений большой размерности с использованием метода сопряженных градиентов//Огарев-online. -2017. -№ 13 -Режим доступа: http://journal.mrsu.ru/arts/algoritm-resheniya-razrezhennoj-sistemy-linejnyx-algebraicheskix-uravnenij-bolshoj-razmernosti-s-ispolzovaniem-metoda-sopryazhennyx-gradientov (дата обращения 27.06.2019). EDN: ZPEBBD
- Стенин И. В., Шаманаев П. А. Идентификация параметров динамической системы второго порядка по экспериментальным данным //Огарев-online. -2018. -№ 14. -Режим доступа: http://journal.mrsu.ru/arts/identifikaciya-parametrov-dinamicheskoj-sistemy-vtorogo-poryadka-po-eksperimentalnym-dannym (дата обращения 27.06.2019). EDN: YPEMCT
