Алгоритм юстировки составных зеркал

Автор: Демин Анатолий Владимирович, Ростокин Павел Владимирович
Журнал: Компьютерная оптика @computer-optics
Рубрика: Короткое сообщение
Статья в выпуске: 2 т.41, 2017 года.
Бесплатный доступ
Предложен алгоритм юстировки составных зеркал телескопов. На основе введённого понятия разностной поверхности и компараторного принципа получены соотношения для оценки точности юстировки составных зеркал как реализация этапов геометрического и оптотехнического позиционирования зеркальных сегментов.
Зеркало, юстировка, крупногабаритная оптика
Короткий адрес: https://sciup.org/14059562
IDR: 14059562 | DOI: 10.18287/2412-6179-2017-41-2-291-294
Alignment algorithm for composite mirrors
This paper presents an alignment algorithm for composite telescope mirrors. Introducing the concept of a differential surface and a comparator principle we deduce relationships for evaluating the alignment accuracy for composite mirrors. This algorithm assumes the implementation of the geometrical and optical positioning of mirror segments.
Текст научной статьи Алгоритм юстировки составных зеркал
Современное развитие технологий по созданию телескопов направлено на создание крупногабаритных зеркально-линзовых телескопов (КЗСТ). Проблемами создания КЗСТ является уменьшение поверхностной плотности главного зеркала как основного массогабаритного компонента оптической системы телескопа и массогабаритные ограничения, накладываемые как технологическими трудностями, так и системой доставки КЗСТ в космос. Учитывая, что, как правило, отражающая поверхность зеркал КЗСТ – это обычные поверхности второго порядка (1), обладающие симметрией вращения относительно оси, проходящей через его вершину, то решение этих проблем достигается, в частности, применением технологии облегчённых зеркал, позволяющей создавать главные зеркала телескопов с приемлемым значением поверхностной плотности отражающей поверхности.
В формуле (1) в соответствии с рис. 1 приняты следующие обозначения: x и y – текущие координаты в системе координат XYZ ; R x и R y – радиусы кривизны в плоскостях XOZ и YOZ ; C X и C Y – константы [ISO10110-12:1996(Е)].
Z (X, y ) =
оптической синхронизации следует выполнять двухэтапную процедуру геометрического и оптотехнического позиционирования зеркальных сегментов СЗ относительно расчётной базовой поверхности (БП).

Рис. 1. Профиль отражающей поверхности зеркала
1. Теоретические основы
Современные информационные технологии, а также
технические достижения существующих актуаторов (например, пьезопривод) позволяют выполнить процесс двухэтапной юстировки методом компарирования. При этом пространственное положение сегментов СЗ относительно БП определяется касательной плоскостью к
< = <
x 2/ R x + y 2/ Ry
,
вершине отражающей поверхности сегмента и норма-
1+ A1 - ( 1 + K
Kx = Rx / cx - 1; K = R / C y - 1. x xX y yY
В силу технологических и массогабаритных ограничений для создания зеркал для крупногабаритных
лью к ней, которые пересекаются в идеальном случае в одной точке на оптической оси СЗ (ось OZ ). Уравнение касательной плоскости к точке O i (вершина поверхности i- го зеркального сегмента) и уравнение нормали к ней представлены формулами (2) и (3)
( z — zcni ) = (d z/dxcni )x( X — xcni ) + (2) + (dz/dycnt )x(y — ycni),
телескопов в последнее время применяют технологию составных отражающих поверхностей [1 –5]. Однако даже в случае изготовления зеркальных сегментов составного зеркала (СЗ) с идеальной поверхностью всё равно остаётся проблема оптической синхронизации сегментов с целью, чтобы СЗ было эквивалентно несоставному [6]. Для решения проблемы
( z z cni ) = ( X x cni ) = ( y y cni )
— 1 ( d z / d x cni ) ( d z / d y cni ) ,
[ O cni X cni x O cni Y cni ] i = 1 x x [ 0БШХEni x OБПiYБПi ] i = 1 = 0.
A x { x eni
x cni } | ; A Y { yem
} m
1 ,
A Z ( ZR 0 БП
Z en ) •
Условием правильного геометрического позиционирования зеркального сегмента является то, что вектора O СП iZ СП i и O БП iZ БП i должны быть коллинеарны и пересекаться в одной расчётной точке на оси OZ (для сферической БП это центр её кривизны), а соответственно, и касательные плоскости X СПi Y СПi и X БПi Y БПi также коллинеарны. Таким образом, математическая модель, отражающая условие (5), может быть представлена в виде векторного произведения (4), а оценка точности геометрического позиционирования – соотношением (5).
-
2. Алгоритмы позиционирования Геометрическое позиционирование
В основе геометрического позиционирования зеркальных сегментов относительно расчётной базовой поверхности лежит алгоритм последовательной технической и метрологической реализации модели 4: 1) начало геометрического позиционирования;
-
2) исходные данные от ЭВМ: уравнение расчётной поверхности (РП). Разбиение РП на сегменты { ЗC РП i } 1 m . Координаты вершин, уравнения касательных плоскостей и нормалей для { ЗC РП i } 1 m относительно БП. Последовательность позиционирования реальных зеркальных сегментов { РЗCi } 1 m (траектория обхода);
-
3) задают i = 1;
-
4) устанавливают РЗС 1 в 1-ю ячейку БП, соответствующую параметрам ЗС РП 1 ;
-
5) определяют с помощью датчиков координаты вершины, параметры касательной плоскости и нормали РЗС 1 относительно БП;
-
6) вычисляют невязку параметров позиционирования РЗС 1 относительно параметров ЗС РП 1 ;
-
7) если величина координатной невязки РЗС 1 не превышает допустимых величин A x , A y 1 и A z 1 , то задаются i =2. Если величина невязки превышает допустимую величину, то возвращаются в п. 4 и корректируют параметры позиционирования РЗС 1 на величину превышения допуска с помощью актуаторов этого сегмента;
-
8) устанавливают РЗС 2 во 2-ю ячейку БП, соответствующую параметрам ЗС РП 2 ;
-
9) определяют с помощью датчиков координаты вершины, параметры касательной плоскости и нормали A X 1 , A Y 1 и A Z 1 относительно БП;
-
10) вычисляют невязку параметров позиционирования РЗС 2 относительно параметров ЗС РП 1 ;
-
11) если величина координатной невязки РЗС 2 не превышает A x 1 , A y 1 и A z 1 , то задают i = 2. Если величина невязки РЗС 2 превышает допустимую величину, то возвращаются в п. 8 и корректируют параметры её позиционирования на величину превышения допуска с помощью актуаторов этого сегмента;
-
12) выполняют операции для РЗС 3 вплоть до РЗС m ; 13) переходят к выполнению алгоритма оптотехнического позиционирования { РЗCi } 1 m на БП.
Если выполняется условие обеспечения допуска на разность координат (5), то переходят к выполнению алгоритма оптотехнического позиционирования зеркальных сегментов относительно расчётной базовой поверхности.
Известно, что при падении на зеркало плоской волны профиль отражённой волны повторяет профиль его отражающей поверхности, тем самым условием правильного оптотехнического позиционирования зеркального сегмента относительно БП является минимизация разности волновых фронтов (6), т.е.
( WEnRO Wen RO) V ^J ^ 0. (6)
X 0 g enR 0 i ^° g enR 0 i
В этой связи уравнение разностной поверхности Z 0 m ) ( x , y ) относительно сферы сравнения радиусом R СФ , являющееся математической моделью оптотехнического позиционирования, примет вид [7]:
Z 0 m ) ( x , y ) = 0
R СФ
V
x БПi
I
1 + . 1 -
+ yen, __________
Л 2 2 A^
I ХБП! + y БП! I
V RcФ ■ c J J
N (7)
x 2n / R + y 2 / R
СПi xi СПi yi
.
1 N
)[ n i =1
N
■ = max, i=1
- апертурные углы , бп -го и i en -
Технологическая карта, являющаяся технической реализацией (4), определяется технологическим и метрологическим обеспечением процесса в соответствии с алгоритмом оптотехнического позиционирования:
-
1) начало оптотехнического позиционирования;
-
2) исходные данные от ЭВМ: расчетные значения волновых аберраций { δ Xi } 1 m и { δ Yi } 1 m для { ЗC РП i } 1 m . Уравнение поверхности волновых аберраций для { ЗC РПi } 1 m ;
-
3) задают i = 1;
-
4) определяют значения волновой аберрации δ X 1 ( РЗС 1 ) и δ Y 1 ( РЗС 1 );
-
5) вычисляют невязку [ δ X 1 – δ X 1 ( РЗС 1 )]
и [ δ Y 1 – δ Y 1 ( РЗС 1 )];
-
6) если [ δ X 1 – δ X 1 ( РЗС 1 )] ≤ ∆ δ X 1
и [ δ Y 1 – δ Y 1 ( РЗС 1 )] ≤ ∆ δ Y 1 , то переходят к i =2. Если [ δ X 1 – δ X 1 ( РЗС 1 )] > ∆ δ X 1 и [ δ Y 1 – δ Y 1 ( РЗС 1 )] > ∆ δ Y 1 , то возвращают в п.4 и корректируются параметры позиционирования РЗС 1 на величину превышения допуска с помощью актуаторов этого сегмента;
-
7) определяют значение волновой аберрации δ X 2 ( РЗС 2 ) и δ Y 2 ( РЗС 2 );
-
8) вычисляют невязку [ δ X 2 – δ X 2 ( РЗС 2 )]
и [ δ Y 2 – δ Y 2 ( РЗС 2 )];
-
9) если [ δ X 2 – δ X 2 ( РЗС 2 )] ≤ ∆ δ X 2
и [ δ Y 2 – δ Y 2 ( РЗС 2 )] ≤ ∆ δ Y 2 , то переходят к I =2. Если [ δ X 2 – δ X 2 ( РЗС 2 )] > ∆ δ X 2 и [ δ Y 2 – δ Y 2 ( РЗС 2 )] > ∆ δ Y 2 , то возвращаются в п.4 и корректируют параметры позиционирования РЗС 2 на величину превышения допуска с помощью актуаторов сегмента РЗС 2 ;
-
10) выполняют операции для РЗС 3 вплоть до РЗС m .
На рис. 2 представлены интерференционные картины поверхности сегментированного зеркала, при этом на рис. 2 а – в результате выполнения алгоритма геометрического позиционирования, а на рис. 2 б – в результате выполнения оптотехнического позиционирования (один сегмент оставлен для сравнения).
Заключение
Таким образом, разработан алгоритм геометрического и оптотехнического позиционирования зеркальных сегментов составного зеркала относительно базовой (расчетной) поверхности, отличающийся более корректной формой, чем в [8, 9].
Этот алгоритм позволяет выполнять юстировку методом виртуального компарирования, что особенно важно для режима эксплуатации высокоапертурных телескопов, работающих в автономном режиме.

Рис. 2. Интерференционные картины поверхности сегментированного зеркала (негатив): в результате
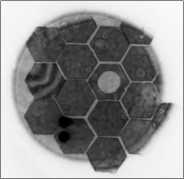
выполнения алгоритма геометрического позиционирования (а), в результате выполнения оптотехнического позиционирования (б) (один сегмент оставлен для сравнения)
Список литературы Алгоритм юстировки составных зеркал
- Sabelhaus, P.A. An overview of the James Webb Space Telescope (JWST) project/P.A. Sabelhaus, J.E. Decker//Proceeding of SPIE. -2004. -Vol. 5487. - DOI: 10.1117/12.549895
- Olczak, G. Wavefront calibration testing of the James Webb Space Telescope primary mirror center of curvature optical assembly/G. Olczak, C. Wells, D.J. Fischer, M.T. Connolly//Proceedings of SPIE. -2012. -Vol. 8450. -84500R. - DOI: 10.1117/12.927003
- Goodman, J.W. Introduction to Fourier Optics/J.W. Goodman. -2nd ed. -New York: McGraw-Hill, 1996.
- Дёмин, А.В. Алгоритм управления составным зеркалом в режиме эксплуатации/А.В. Дёмин, И.А. Ковалев//Вопросы радиоэлектроники. Серия: Техника телевидения. -2014. -№ 2. -С. 88-93.
- Demin, A.V. The mathematical model and the simulation modelling algoritm of the multitiered mechanical system/A.V. Demin, I.A. Kovalev//ABC Journal of Advanced Research. -2013. -Vol. 2(1), Issue 3. -P. 44-48. - DOI: 10.18034/abcjar.v2i1.427
- Полещук, А.Г. Дифракционные оптические элементы для управления параметрами лазерного излучения и прецизионного контроля формы асферических поверхностей/А.Г. Полещук, В.П. Корольков, Р.К. Насыров//Интерэкспо Гео-Сибирь. -2015. -Т. 5, № 2. -С. 232-238.
- Демин, А.В. Математическая модель процесса юстировки составных зеркал/А.В. Дёмин//Известия ВУЗов. Приборостроение. -2015. -Т. 58, № 11. -С. 901-907. - DOI: 10.17586/0021-3454-2015-58-11-901-907
- Демин, А.В. Алгоритм юстировки составных зеркал высокоапертурных телескопов/А.В. Демин, Л.М. Менделеева//Известия ВУЗов. Приборостроение. -2014. -Т. 57, № 1. -С. 51-56.
- Демин, А.В. Алгоритм компоновки составных зеркал/А.В. Демин, А.Ю. Рабыш//Научно-технический вестник СПбГУ ИТМО. -2008. -№ 58. -С. 31-36.
- Александров, П.С. Курс аналитической геометрии и нелинейной алгебры/П.С. Александров. -М.: Наука, 1979. -512 с. -ISBN: 978-5-8114-0908-2.
