Алгоритм классификации изображений парковочных мест автостоянки на основе гистограмм ориентированных градиентов и метода опорных векторов

Автор: Ярошевич Павел Владимирович, Богуш Рихард Петрович
Журнал: Компьютерная оптика @computer-optics
Рубрика: Обработка изображений: Распознавание образов
Статья в выпуске: 1 т.41, 2017 года.
Бесплатный доступ
Для повышения эффективности классификации изображений парковочных мест предлагается алгоритм, который может быть использован в интеллектуальных системах видеомониторинга автостоянок. Признаки изображения парковочного места формируются на основе гистограмм ориентированных градиентов путем выполнения следующих шагов: вычисление горизонтальных и вертикальных градиентов для исходного изображения парковочного места, нахождение модуля вектора градиента и ориентаций, накопление мощностей градиентов в соответствии с ориентациями в ячейках, объединение ячеек в блоки, вычисление второй нормы ориентаций и нормализация ориентаций ячеек блока. Классификация дескрипторов парковочного места выполняется с использованием метода опорных векторов. В работе представлены результаты экспериментов по оценке наиболее эффективных параметров дескриптора парковочного места и типа функции ядра классификатора.
Машинное зрение, анализ изображений, распознавание образцов
Короткий адрес: https://sciup.org/14059620
IDR: 14059620 | DOI: 10.18287/2412-6179-2017-41-1-110-117
Classification algorithm of parking space images based on a histogram of oriented gradients and support vector machines
In this paper, a classification algorithm of parking space images is proposed to improve the accuracy of parking space classification, which can be used in smart parking management systems based on video surveillance. The descriptors of a parking space image are formed on the basis of a histogram of oriented gradients by performing the following steps: computation of vertical and horizontal gradients of the original parking space image, computation of the modulus of the gradient and orientation vectors, the gradients are then accumulated into separate cells according to their orientation, the cells are united into blocks, and the orientations of block's cells are normalized. A support vector machine is used to classify the descriptors of the parking space. The purpose of the research was to determine the most efficient parameters of the parking space descriptor and a kernel function. The paper presents the results of experiments.
Текст научной статьи Алгоритм классификации изображений парковочных мест автостоянки на основе гистограмм ориентированных градиентов и метода опорных векторов
Системы видеонаблюдения приобретают все большую значимость в различных сферах деятельности человека [1-3]. Благодаря развитию технологий компьютерного зрения предложен ряд систем видеонаблюдения с интеллектуальной обработкой входных видеоданных, включая системы управления автомобильными парковками. Такие видеосистемы могут автоматически выполнять многие функции. Например, определение занятости парковочного места, подсчет количества автомобилей на стоянке, определение расположения или типа транспортного средства, анализ активности людей, предоставление справочной информации в виде маршрута к парковочному месту, удаленное наблюдение владельца за автомобилем с помощью смартфона и оповещение в случае возникновения нештатной ситуации и т.д. Очевидно, что для таких систем необходимо алгоритмическое обеспечение по обработке входных видеоданных, основным требованием к которому является высокая эффективность классификации парковочных мест, в том числе при наличии различных шумовых факторов: теней, световых пятен в солнечную погоду, изменений общей освещенности автомобильной парковки в течение суток, изменений погодных условий и т.д. Таким образом, сложность задачи предопределила разработку и развитие ряда методов и алгоритмов для её решения.
Общий подход для построения алгоритмов обнаружения свободных и, соответственно, занятых парковочных мест предполагает выполнение следующих шагов: предварительная сегментация и локализация парковочных мест (регионов интереса), вычисление их признаков, классификация и интерпретация результата. В настоящее время активно ведутся исследования в данной области и предлагается ряд методов для определения занятости парковочных мест по видеоизображениям [4]: методы, основанные на обнаружении автомобиля на парковочном месте [5, 6]; методы, основанные на сравнении обрабатываемого парковочного места с эталонным свободным местом [7, 8] и комбинированные методы [9, 10], построенные на основе первых двух подходов. Методы первой группы неустойчивы к ошибкам классификации, возникающим из-за взаимного перекрытия автомобилей на видеоизображениях. Методы второй группы предполагают использование модели эталонного свободного парковочного места, поэтому вероятность ложной классификации увеличивается при появлении естественных шумовых факторов, людей, при локальном изменении освещенности и т.д. Комбинированные методы, как правило, предполагают использование преимуществ обоих подходов, но требуют при этом значительных вычислительных затрат.
Для построения вектора признаков изображения парковочного места перспективным является использование гистограмм ориентированных градиентов (HOG), т.к. в данном случае обеспечивается инвариантность относительно поворота изображения и изменения масштаба, устойчивость к шуму и изменению освещения [11]. В последнее время предложен ряд методов и алгоритмов для классификации парковочных мест с использованием гистограмм ориентированных градиентов, к наиболее эффективным можно отнести [9, 14-16]. В работе [14] рассматривается метод, использующий указанный дескриптор и байесовский классификатор, для которого вероятность правильной классификации при нормальных условиях съемки достигает 0,9945. Метод предполагает построение структурной ЗВ-модели для каждого парковочного места и характеризуется большими временными затратами. Алгоритм, представленный в [9], направлен на повышение производительности подоб ного подхода и при наиболее оптимальных условиях съемки позволяет достичь вероятности правильной классификации 0,9936. В работе [15] показано дальнейшее развитие алгоритма путем применения на этапе классификации метода опорных векторов (SVM), за счет чего обеспечивается увеличение вероятности правильной классификации до 0,9955. В [16] исследованы алгоритм для классификации парковочных мест на основе гистограмм ориентированных градиентов и машин опорных векторов и алгоритм на основе признаков Хаара и метода AdaBoost. При этом вероятность правильной классификации достигается для первого и второго алгоритмов 0,691 и 0,95 соответственно. Таким образом, несмотря на хорошие качественные характеристики методов обнаружения свободных парковочных мест автостоянки в системах видеонаблюдения, данная задача не решена в полной мере в настоящее время, следовательно, исследования в данном направлении актуальны.
Целью данной работы является повышение эффективности классификации изображений парковочных мест на основе гистограмм ориентированных градиентов и метода опорных векторов, определение наиболее эффективных параметров дескриптора и типа разделяющей функции классификатора.
где
0
-
5) Формирование вектора признаков:
-
5.1) Вычисление второй нормы ориентаций ячеек блока Ву8:
5.2) Нормализация ориентаций ячеек блока:
-
./ +5» -1 g +5/, -1 6-1
-=/ j=g 1-0
5.3) Составление вектора признаков:
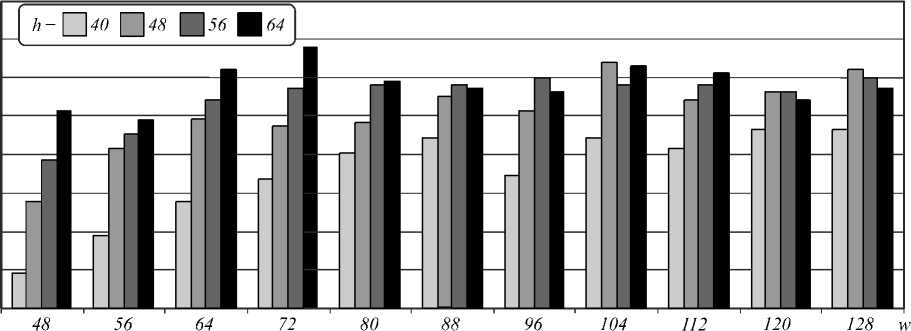
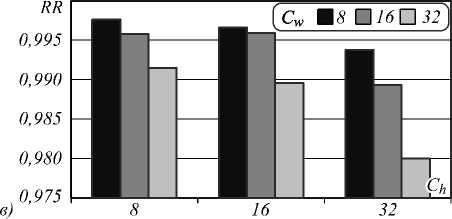
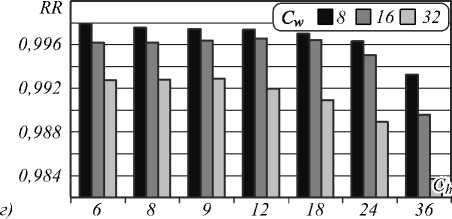
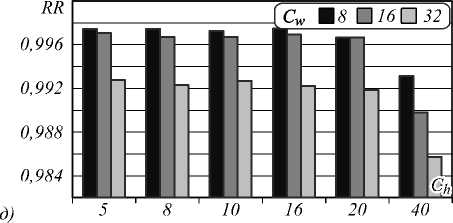
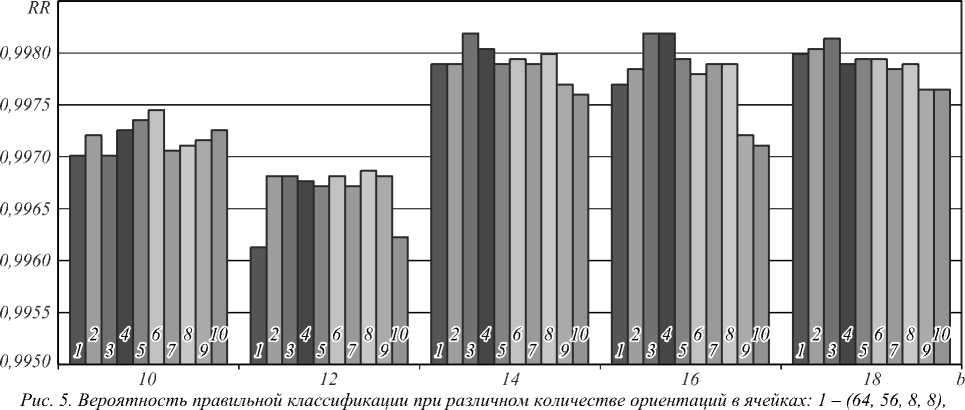
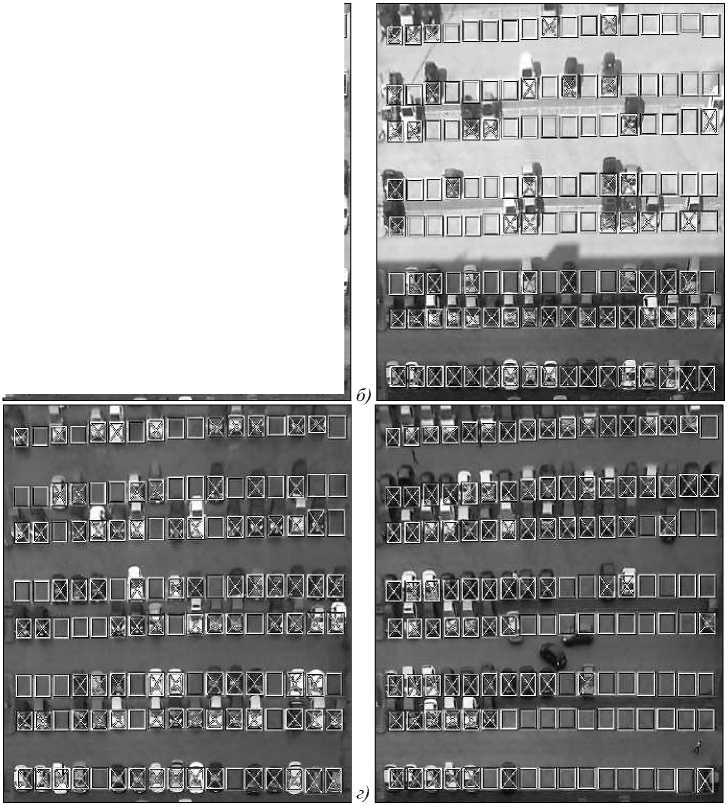
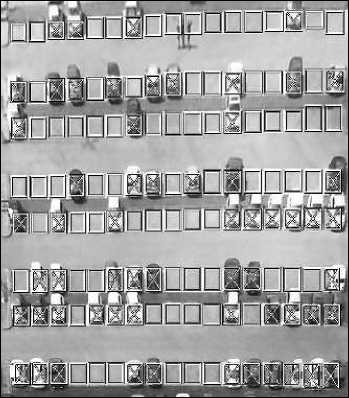
d = С‘ J’s b-B1,-Bl,y-,v.g+fyb Размер вектора d зависит от размера изображения w^h, размера ячеек С,уСн и размера блока B,yBh, а также от количества ориентаций в ячейке Ь. Таким образом, количество элементов в признаковом векторе может быть определено как: 1. Вычисление вектора признаков Алгоритм построения вектора признаков парковочного места на основе гистограммы ориентированных градиентов требует выполнения следующих шагов: 1) Вычисление градиентов для исходного изображения I с размерами wx/z: 2. Классификация признаков Для классификации дескрипторов парковочного места, полученных на основе гистограмм ориентированных градиентов, применяется метод опорных векторов, который позволяет разделять парковочные места на два класса - свободные и занятые. Правило классификации парковочных мест может быть записано в следующем виде [12]: a(tZ) = sign| ^X/y^d^-wA (9) G^I^-AT Gy,=IiyMy, где 0 2) Вычисление модуля вектора градиента Gx, >- и ориентации 0^ для изображения /: v v = arctan (Gyx „ !GX „) (2) у A,V x,y x,y \ x,y x,y J x / и формирование матрицы градиентов G и ориентаций 0 изображения I. 3) Разбиение G на ячейки Ст,„ размером С«уСь и накопление мощностей градиентов в соответствии с ориентациями 0, для каждой из них: где a(d) - решающее правило (принимающее одно из значений меток класса: +1 и -1 для свободных и занятых мест соответственно), Ц Хо, Х\,...,Хп) - вектор двойственных переменных, y(yo,yt,.. ,,уп) - вектор меток классов опорных векторов, {^} — - множество С* 0п+1)си-1 , Z-(27t/6)<0,,<(/ + l).(2K/6) [0, (2к/6) > 0,; U 0,; >(/ + !)• (2л/6) ’ } j=nch где b - число ориентаций в ячейке, которое определяется поставленной задачей, 0 4) Объединение ячеек в блоки Ву8 размером В-,уВу ( С с, Vye.-vg В, = .Лк опорных векторов признаковых векторов, wo - пороговое значение, d - обрабатываемый вектор признаков. Эффективность работы классификатора в значительной степени определяется применяемой функцией ядра. Для классификации парковочных мест могут быть использованы следующие функции: • линейная K,MA^ = da-db,(10) • радиальная Ау (<Л) = exp(-Y- \\da -dh||2), • полиномиальная К^АьМ^^АУ^,(12) • пересечения гистограмм ^U^A^Z^tHW)’ оз) с С где da a db - признаковые вектора;у, 8, с - параметры соответствующих ядер. 3. Результаты экспериментов Для проведения экспериментов и оценки результатов исследований рассмотренный подход реализован на языке Java с использованием среды разработки eclipse, библиотеки компьютерного зрения OpenCV 3.0.0 и библиотеки машинного обучения метода опорных векторов jlibsvm. Разработка, тестирование и анализ результатов работы алгоритма проводились на персональном компьютере с центральным процессором Intel(R) Core(TM)2 DuoCPU с тактовой частотой 2,6 ГГц и объемом ОЗУ 4,0 ГБ. В качестве данных для экспериментов использовались изображения парковки Папского католического университета Параны (Pontifical Catholic University of Parana) из базы данных Pk-Lot[13], Pk-Lot содержит изображения парковки, полученные при различных погодных условиях, теневых эффектах и освещенности. Парковочные места находятся на различном удалении от камеры, которая установлена достаточно высоко над парковкой. Это позволяет перейти к виду сверху на изображение парковки путем преобразования перспективы, при этом отсутствуют перекрытия изображений парковочных мест транспортными средствами, расположенными рядом. Для тестирования алгоритма использованы 2153 изображения парковки с общим количеством изображений парковочных мест 292808, которые были получены при различных погодных условиях (табл. 1). Табл. 1. Основные характеристики используемых изображений парковки Погодные условия Период съемки (дней), количество изображений Общее количество изображений мест парковки свободных занятых Туман 6/664 61406 28898 Дождь 4/416 18670 37906 Солнечно 12/1073 78801 67127 На рис. 1 представлен пример изображений свободных и занятых парковочных мест, полученных в различных условиях съемки, используемых при обучении классификатора, отличных от изображений, на основе которых проводились исследования характеристик алгоритма. Рис. 1. Пример изображений, используемых при обучении классификатора: свободные парковочные места (а), занятые места парковки (б) На рис. 2 представлена визуализация ориентаций ячеек свободного и занятого парковочных мест, вы численных на основе гистограмм ориентированных Рис. 2. Визуализация ориентаций ячеек для изображений парковочных мест: занятое парковочное место (а), свободное парковочное место (б) Полученный вектор признаков алгоритма имеет ряд параметров, которые определяют эффективность классификации: размеры парковочного места, размеры ячейки, гистограммы ориентаций ячейки, блока, шага перекрытия блоков и схемы нормализации. Поэтому для предложенного алгоритма необходимо выполнить исследования с целью определения наиболее значимых параметров, обеспечивающих максимальную эффективность классификации. Эффективность дескриптора оценивается вероятностью правильной классификации изображений парковочных мест RR(.w, h, Cw, Ch, b\ которая вычисляется по формуле: TP+TN RR^w,h,C ,Ch,b^ =----------------, (14 v / TP + FP + TN + FN где w, h - ширина и высота изображения парковочного места; C„., Ch - ширина и высота ячейки, b - количество ориентаций в ячейке; ТР - количество правильно классифицированных свободных парковочных мест; FP - количество свободных мест парковки, классифицированных как занятые; TN - количество правильно классифицированных занятых парковочных мест, FN - количество занятых мест парковки, классифицированных как свободные. Вероятность ложной классификации изображений свободных парковочных мест определяется как: FPR = FPKTP + FP). (15) Вероятность ложной классификации изображений занятых парковочных мест определяется как: FNR = FN/(TN + FN). (16) На рис. 3 представлены результаты эксперимента по определению наиболее эффективного размера изображения парковочного места дескриптора для наиболее используемых размеров ячейки при решении других практических задач 8x8 и количестве ориентаций в ячейке равном 9 для признакового вектора, формируемого на основе гистограмм ориентированных градиентов. Из рис. 3 следует, что наиболее эффективными могут быть размеры изображений парковочных мест: 64x56, 64x64, 64x72, 64x80, 48x104, для которых необходимо определение значений последу- ющих параметров алгоритма. На рис. 4 показаны результаты экспериментов по определению наиболее эффективных размеров ячеек, обеспечивающих максимальную вероятность правильного обнаружения для изображений с размерами, полученными на предыдущем этапе исследований. Анализ рис. 4 показывает, что максимальная вероятность пра вильной классификации при различных размерах ячеек обеспечивается для соответствующих размеров изображений парковочного места, при следующих параметрах дескриптора (w, h, С,,., С/,) парковочного места: (64, 56, 8, 8), (64, 64, 8, 8), (64, 72, 8, 6), (64, 72, 8, 8), (64, 72, 8, 9), (64, 72, 8, 12), (64, 80, 8, 5), (64, 80, 8, 8), (64, 80, 8, 16), (48, 104, 8, 8). RR 0,9970 0,9965 0,9960 0,9955 0,9950 0,9945 0,9940 0,9935 Рис. 3. Вероятность правильной классификации для различных размеров изображений парковочных мест RR RR 1,000 0,995 0,990 0,985 ' Cw IS 1 ' П76Щ2] ГТЬ- 08 0/2 0.997 -^---■----■---[176ПЛ Illi Ин 0,980 а) С/, б) Рис. 4. Вероятность правильной классификации при различных размерах ячеек для изображения с wxh: а) 48x104, б) 64 x56, в) 64x64, г) 64x80, д) 64x72 На следующем шаге проведены экспериментальные исследования по определению количества ориентаций в ячейке, обеспечивающих максимальную вероятность правильного обнаружения, в интервале от 4 до 18, т.е. в два раза меньше и больше от традиционно применяемого значения при решении других практических задач с использованием гистограмм ориентированных градиентов. На рис. 5 представлены результаты исследований для количества ориентаций в ячейке в диапазоне от 9 до 18, т.к. для меньшего количества ориентаций вероятность правильного обнаружения значительно ниже. 2 - (64, 64, 8, 8), 3 - (64, 72, 8, 6), 4 - (64, 72, 8, 8), 5 - (64, 72, 8, 9), 6 - (64, 72, 8, 12), 7 - (64, 80, 8, 5), 8 - (64, 80, 8, 8), 9 - (64, 80, 8, 16), 10- (48, 104, 8, 8) Результаты, представленные на рис. 5, свидетельствуют о том, что вероятность правильной классификации тестовых изображений является максимальной для трех различных параметров дескриптора (w, h, Cw, Ch, by. (64, 72, 8, 6, 14), (64, 72, 8, 6, 16), (64, 72, 8, 8, 16). В этом случае необходимо найти признаковый вектор минимальной длины. Исходя из размеров полученных дескрипторов: Ds (64,72,8,16,14) = 4928, Ds (64,72,8,6,16) = 5638, Ds^EA, 72, 8, 8, 16) = 3584, следует, что наиболее эффективными являются следующие параметры дескриптора: размер изображения парковочного места - 64x72, размер ячейки - 8x8, количество ориентаций в ячейке - 16. При использовании метода опорных векторов тип функции ядра и выбранные для него параметры в значительной мере влияют на результат классификации. Поэтому проведены эксперименты по оценке эффективности классификации методом опорных векторов полученных признаков парковочных мест на основе гистограмм ориентированных градиентов при использовании различных функций ядра (табл. 2). Табл. 2. Сравнительная характеристика эффективности классификации при использовании различных функции ядра Тип функции ядра Ширина разделяющей полосы Кол-во опорных векторов RR FPR FNR Линейная 4,366 161 0,99431 2,91е-3 9,16е-3 Пересечения гистограмм 2,387 262 0,99652 2,12е-3 5.19е-3 Радиальная, 7 = 0,1 1,371 330 0,99706 1,41е-3 4,86е-3 Полиномиальная, 5 = 7, 7 = 0,1, с = 0 0,752 479 0,99740 1.58е-3 3.86е-3 Результаты исследований, представленные в таблице, свидетельствуют о том, что функция ядра на основе пересечения гистограмм является наиболее эффективной на основе комплексного анализа всех представленных качественных характеристик. На рис. 6 показан пример классификации парковочных мест разработанным алгоритмом с определенными параметрами на свободные и занятые. Сравнение характеристик представленного алгоритма с другими алгоритмами классификации парковочных мест приведено в табл. 3. Анализ представленных данных показывает, что предложенный подход обеспечивает повышение вероятности правильной классификации изображений парковочных мест. Заключение Для классификации изображений парковочных мест автостоянки, полученных с использованием систем видеонаблюдения, предложен алгоритм на основе вычисления гистограмм ориентированных градиентов и метода опорных векторов. Признаки изображения парковочного места формируются на основе гистограмм ориентированных градиентов путем выполнения следующих шагов: вычисление горизонтальных и вертикальных градиентов для исходного изображения парковочного места, нахождение модуля вектора градиента и ориентаций, накопление мощностей градиентов в соответствии с ориентациями в ячейках, объединение ячеек в блоки, вычисление второй нормы ориентаций ячеек блока и нормализация ориентаций ячеек блока. Классификация дескрипторов парковочного места выполняется с использованием метода опорных векторов с функцией ядра на основе пересечения гистограмм. На основе экспериментальных исследований установлены наиболее эффективные значения параметров дескриптора: размер изображения парковочного места - 64x72, размер ячейки -8x8, количество ориентаций в ячейке -16. При этом вероятность правильной классификации 0,997. Полученные результаты подтверждают эффективность предложенного подхода, перспективными являются исследования по повышению быстродействия метода за счет использования технологии CUDA. в) а) Рис. 6. Результат классификации парковочных мест: а) в солнечный день, б) при наличии тени, в) после дождя, г) в пасмурную погоду Табл. 3. Сравнение характеристик алгоритмов классификации парковочных мест Алгоритм Дескриптор Классификатор Количество снимков парковки Количество парковочных мест Вероятность правильной классификации С.-С. Huang, Y.-S. Dai, S.-J. Wang [14] HOG (w, h, C„, Ch, 6) = (64, 32, 16, 16, 8) Bayes 955 72 0,9945 С.-C. Huang, Y.-S. Tai, S.-J. Wang [9] HOG (w, h, C„, C;„ 6) = (64, 32, 16, 16, 10) Bayes 825 72 0,9939 C.-C. Huang, H.T. Vu, Y.-R. Chen [15] HOG (w, h, C„, C;„ 6) = (96, 48, -, -, -) SVM 1564 72 0,9955 R. Fusek at al. [16] HOG (W. h, cm c,,. 6) = (96, 96, 8, 8, 4) SVM - 57 0,691 R. Fusek at al. [16] Haar Adaboots - 57 0,95 M. Tschentscher at al. [17] Histogram, HSV k-NN 1010 36 0,9655 DoG 0,9358 Histogram. RGB SVM 0,9712 DoG 0,9413 L. Baroffio at al. [18] Histogram, HSV SVM 3791 28 0,96 4152 37 0,93 4474 100 0,87 Представленный алгоритм HOG (w, h, C„, C,„ 6) = (64, 72, 8, 8, 16) SVM 2153 136 0,997


Список литературы Алгоритм классификации изображений парковочных мест автостоянки на основе гистограмм ориентированных градиентов и метода опорных векторов
- Ngan, K. Video segmentation and its applications/K. Ngan, H. Li//New York, Dordrecht, Heidelberg, London: Springer, 2011. -164 p. - DOI: 10.1007/978-1-4419-94182-0
- Brovko, N. Smoke detection algorithm for intelligent video surveillance system/N. Brovko, R. Bogush, S. Ablameyko//Computer Science Journal of Moldova. -2013. -Vol. 21(1), No. 61. -P. 142-156.
- Васин, Н.Н. Система технического зрения для контроля состояния железнодорожного пути/Н.Н. Васин, Р.Р. Диязитдинов//Компьютерная оптика. -2016. -Т. 40, № 3. -С. 410-415. - DOI: 10.18287/2412-6179-2016-40-3-410-415
- Idris, M.Y. Car park system: A review of smart parking system and its technology/M.Y.I. Idris, Y.Y. Leng, E.M. Tamil, N.M. Noor, Z. Razak//Information Technology Journal. -2009. -Vol. 8(2). -P. 101-113. - DOI: 10.3923/itj.2009.101.113
- True, N. Vacant parking space detection in static images. Technical Report/N. True. -San Diego: University of California, 2007.
- Bong, D.B.L. Car-park occupancy information system/D.B.L. Bong, K.C. Ting, N. Rajaee//Third Real-Time Technology and applications symposium, RENTAS 2006, Serdang, Selangor, December 2006. -2006.
- Sastre, R.J.L. Computer algebra algorithms applied to computer vision in a parking management system/R.J.L. Sastre, P.G. Jimenez, F.J Acevedo, S.M. Bascon//In: IEEE international symposium on industrial electronics, ISIE 2007. -2007. -P. 1675-1680. - DOI: 10.1109/ISIE.2007.4374856
- Almeida, P. Parking space detection using textural descriptors/P. Almeida, L.S. Oliveira, E. Silva, A. Britto, A.L. Koerich//IEEE International Conference on Systems, Man, and Cybernetics (SMC). -2013. -P. 3603-3608. - DOI: 10.1109/SMC.2013.614
- Huang, C.-C. Vacant parking space detection based on plane-based bayesian hierarchical framework/C.-C. Huang, Y.-S. Tai, S.-J. Wang//IEEE Transactions on Circuits and Systems for Video Technology. -2013. -Vol. 23(9). -P. 1598-1610. - DOI: 10.1109/TCSVT.2013.2254961
- Jermsurawong, J. Car parking vacancy detection and its application in 24-hour statistical analysis/J. Jermsurawong, M.U. Ahsan, A. Haidar, H. Dong, N. Mavridis//10th International Conference on Frontiers of Information Technology. -2012. -P. 84-90. - DOI: 10.1109/FIT.2012.24
- Dalal, N. Histograms of Oriented Gradients for Human Detection/N. Dalal, B. Triggs//IEEE Conference on Computer Vision and Pattern Recognition. -2005. -Vol. 1. -P. 886-893. - DOI: 10.1109/CVPR.2005.177
- Вапник, В.Н. Теория распознавания образов/В.Н. Вапник, А.Я. Червонекис. -М.: Наука, 1974. -416 с.
- PKLot -A robust dataset for parking lot classification . -2015. -URL: http://web.inf.ufpr.br/vri/news/parking-lot-database (дата обращения 15.12.2015).
- Huang, C.-C. A surface-based vacant space detection for an intelligent parking lot/C.-C. Huang, Y.-S. Dai, S.-J. Wang//Proceedings of 12th International Conference on ITS Telecommunications. -2012. -P. 284-288. - DOI: 10.1109/ITST.2012.6425183
- Huang, C.-C. A multiclass boosting approach for integrating weak classifiers in parking space detection/C.-C. Huang, Hoang Tran Vu, Yi-Ren Chen//IEEE International Conference on Consumer Electronics -Taiwan (ICCE TW) 2015. -2015. -P. 314-315. - DOI: 10.1109/ICCE-TW.2015.7216918
- Fusek, R. AdaBoost for parking lot occupation detection/R. Fusek, K. Mozdřeň, M. Šurkala, E. Sojka//InProceedings of the 8th International Conference on Computer Recognition Systems CORES 2013. -2013. -P. 681-690. - DOI: 10.1007/978-3-319-00969-8_67
- Tschentscher, M. Scalable real-time parking lot classification: An evaluation of image features and supervised learning algorithms/M. Tschentscher, C. Koch, M. König, J. Salmen, M. Schlipsing//International Joint Conference on Neural Networks (IJCNN). -2015. -P. 1-8. - DOI: 10.1109/IJCNN.2015.7280319
- Baroffio, L. A visual sensor network for parking lot occupancy detection in Smart Cities/L. Baroffio, L. Bondi, M. Cesana, A. Redondi, M. Tagliasacchi//IEEE 2nd World Forum on Internet of Things (WF-IoT), 2015. -2015. -P. 745-750. - DOI: 10.1109/WF-IoT.2015.7389147
