Алгоритм наведения управляемой ракеты класса «воздух-воздух» с активной радиолокационной головкой самонаведения на вертолет при различном характере его полета

Автор: Богданов А.В., Горбунов С.А., Кучин А.А., Хадур А.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 7 т.13, 2020 года.
Бесплатный доступ
На основе математического аппарата статистической теории оптимального управления синтезированы оптимальные по минимуму локального функционала качества метод и алгоритм наведения авиационной управляемой ракеты класса «воздух-воздух» с активной радиолокационной головкой самонаведения при наведении на воздушную цель класса «вертолет» при различном характере его полета, в том числе при зависании. Синтез выполнен в результате летно-экспериментальных исследований радиолокационных сигналов, отраженных от реального вертолета. Представлены рекомендации по обеспечению бессрывного сопровождения вертолета в активной радиолокационной головке самонаведения.
Вертолет, авиационная управляемая ракета, метод наведения, алгоритм наведения, сопровождение воздушной цели, статистическая теория оптимального управления
Короткий адрес: https://sciup.org/146281610
IDR: 146281610 | УДК: 623.46 | DOI: 10.17516/1999-494X-0269
The guidance algorithm of air-to-air guided missile with an active radar target-seeking head to a helicopter with various modes of its flight
On the basis of the mathematical apparatus of the statistical theory of optimal control, the method and algorithm of guidance of an air-to-air guided missile with an active radar target-seeking head when aiming at a «helicopter» class air target with various modes of its flight, including when hovering have been developed. The synthesis has been carried out as a result of flight experimental studies of radar signals reflected from a real helicopter. Also, recommendations for ensuring continuous tracking of a helicopter in an active radar target-seeking head have been presented.
Текст научной статьи Алгоритм наведения управляемой ракеты класса «воздух-воздух» с активной радиолокационной головкой самонаведения на вертолет при различном характере его полета
Цитирование: Богданов, А.В. Алгоритм наведения управляемой ракеты класса «воздух-воздух» с активной радиолокационной головкой самонаведения на вертолет при различном характере его полета / А.В. Богданов, С.А. Горбунов, А.А. Кучин, А.А. Хадур // Журн. Сиб. федер. ун-та. Техника и технологии, 2020. 13(7). С. 829–842. DOI: 10.17516/1999-494X-0269
можением, полет в режиме «висение» [7-9]. Кроме того, методы и алгоритмы синтезированы без учета результатов экспериментальных исследований информационных свойств сигналов, отраженных от вертолета.
В работе под методом наведения понимаем закон формирования требуемой фазовой траектории, наведение по которой позволит поразить цель, а под алгоритмом - правило формирования управляющих сигналов, именуемых также параметрами рассогласования, по которому определяется несоответствие реальных фазовых координат x yi объекта управления (ОУ) их требуемым значениям x Ti (i=1,r) [10-12].
Цель статьи – на основе СТОУ в пространстве состояний синтезировать оптимальные по минимуму локального функционала качества метод и алгоритм наведения авиационной УР с АРГС на вертолет при различном характере его полета с учетом результатов летно-экспериментальных исследований (ЛЭИ) информационных свойств РЛ-сигналов, отраженных от реального вертолета.
Экспериментальные исходные данные
В результате ЛЭИ информационных свойств РЛ-сигналов, отраженных от вертолета [7, 8, 13], сущность которых заключается в регистрации с помощью специальной аппаратуры, установленной в состав бортовой радиолокационной станции (РЛС) истребителя МиГ-31 сигналов, отраженных от реального вертолета при различном характере его полета, и их обработка в лабораторных условиях на основе использования узкополосного спектрального анализа, позволили сделать следующие выводы.
Во-первых, РЛ-сигнал, отраженный от вертолета, спектральный доплеровский портрет которого представлен на рис. 1, имеет сложную структуру, обусловленную отражениями сигнала от: фюзеляжа вертолета; вращающихся лопастей несущего винта, имеющих различную радиальную скорость; вращающихся частей силовой установки вертолета [7, 8, 14].
Рис. 1. Спектральный доплеровский портрет сигнала, отраженного от вертолета: 1 – отражения от подстилающей поверхности; 2 – зона режекции фильтра в бортовой РЛС истребителя (куда устанавливалась аппаратура регистрации); 3 – отражения от фюзеляжа вертолета; 4 – отражения от вращающихся лопастей несущего винта вертолета; 5 – отражения от вращающихся частей силовой установки вертолета
Fig. 1. Spectral Doppler portrait of the signal reflected from the helicopter: 1 – reflections from the underlying surface; 2 – rejection area; 3 – reflections from the helicopter fuselage; 4 – reflections from the rotor blades of the helicopter; 5 – reflections from the power plant of the helicopter
Fd, Hz
Рис. 2. Спектральный доплеровский портрет сигнала, отраженного от вертолета со скоростью менее 60 м/с: 1 – подстилающая поверхность; 2 – зона режекции; 3 – отражения от вращающихся лопастей несущего винта вертолета; 4 – отражения от вращающихся частей силовой установки вертолета
Fig. 2. Spectral Doppler portrait of the signal reflected from the helicopter at a speed of less than 60 m/s: 1 - reflections from the underlying surface; 2 – rejection area; 3 – reflections from the rotor blades of the helicopter; 4 – reflections from the power plant of the helicopter
Во-вторых, при полете вертолета со скоростью менее 216 км/ч (60 м/с) (в том числе и при полете в режиме «висение») отражения от фюзеляжа вертолета попадают в зону режекции, в этом случае будут наблюдаться (рис. 2) только отражения от вращающихся лопастей несущего винта вертолета и от вращающихся частей силовой установки вертолета.
Кроме того, известно [7, 8], что отражения РЛ-сигнала от вращающихся частей силовых установок летательных аппаратов имеют явную ракурсную зависимость. Поэтому для данной ситуации в качестве оценки скорости Vc6 сближения в режиме «висение» целесообразно использование значений доплеровских частот спектральных составляющих РЛ-сигнала, отраженного от вращающихся лопастей несущего винта вертолета [7, 8].
Таким образом, на основе анализа результатов ЛЭИ информационных свойств РЛ-сигналов, отраженных от вертолета, можно заключить, что как при стационарном полете (со значительной скоростью), так и при ускорении (торможении) вертолета целесообразным является использование при синтезе метода и алгоритма наведения УР с АРГС доплеровских частот, обусловленных скоростью сближения УР с фюзеляжем вертолета, а при полете в режиме «висение» - доплеровские частоты, обусловленные скоростями сближения УР с вращающимися лопастями несущего винта вертолета.
Постановка задачи на синтез
В общем случае задача синтеза метода и алгоритма наведения ракеты на воздушную цель в рамках СТОУ в пространстве состояний формулируется следующим образом [10, 11]: для системы с заданной частью
х(0 = Fy (r)xy (0 + Ву (Г)и(О + ^. (О, (1)
предназначенной для отработки процесса x,(» = F,(Ox,(O+4,(O - (2)
при наличии измерений
z(O = H(Ox(O + t(O найти закон управления
u(O = K XQ^CO-iyCO]
оптимальный по минимуму локального функционала качества

где F y ( t ) - динамическая матрица состояния процесса ху (t );
x y (t) - n-мерный вектор управляемых фазовых координат;
В у ( t ) - матрица эффективности управления;
u
(
t
) - r-мерный вектор сигналов управления (r
^ y ( t ) - n-мерный вектор центрированных гауссовских возмущений процесса ху(Г)с известной матрицей G y односторонних спектральных плотностей;
F T ( t ) - динамическая матрица состояния процесса хт (/);
x T ( t ) - n-мерный вектор требуемых фазовых координат;
^ т ( t ) - n-мерный вектор центрированных гауссовских возмущений процесса хт (0 с известной матрицей G т односторонних спектральных плотностей;
H(t) – матрица связи обобщенного вектора состояния с m-мерным вектором наблюдений (измерений) (m≤n);
^( t ) - n-мерный вектор центрированных гауссовских шумов измерений с известной матрицей G и односторонних спектральных плотностей;
К – матрица штрафов за величину сигналов управления;
– матрица, определяющая способность системы воспринимать сигналы управления;
Q – матрица штрафов за точность управления ;
М у – математическое ожидание при условии, что имеются результаты измерения хотя бы части фазовых координат х у и х т .
Принятые допущения при синтезе метода и алгоритма
-
1. Каналы управления ракетой в горизонтальной и вертикальной плоскости независимы, в дальнейшем рассматривается только горизонтальная плоскость, результаты ее рассмотрения могут быть применимы и для вертикальной плоскости.
-
2. При самонаведении на борту управляемой ракеты формируются значения требуемого поперечного ускорения.
-
3. УР и вертолет могут маневрировать с поперечными к линии визирования «УР-вертолет» ускорениями j p и j ц соответственно, а ускоряться - с продольным к линии визирования «УР-вертолет» ускорением j прод ;
-
4. Под различным характером полета вертолета понимается любое из возможных его состояний:
-
- стационарный полет – горизонтальный полет вертолета в турбулентной атмосфере, при котором постоянные значения скорости V B , высоты Н и курса не изменяются во времени;
-
- ускорение (торможение) – полет вертолета, при котором постоянные значения скорости V в , высоты Н и курса могут изменяться во времени;
-
- режим «висение» – полет вертолета, при котором скорость V в ≈ 0 м/с, а высота Н и курс
постоянны во времени.
Динамическая модель взаимного перемещения УР и вертолета при различном характере его полета
На рис. 3 представлена схема взаимного расположения УР и вертолета (вид сверху).
Рис. 3. Взаимное расположение УР и вертолета (вид сверху)
Fig. 3. The relative position of the rocket and the helicopter (top view)
На рис. 3 обозначено:
-
D – расстояние между УР и фюзеляжем вертолета ВЦ класса «вертолет»;
-
ω – угловая скорость вращения линии визирования между УР и вертолетом;
V р – текущая скорость УР;
-
j прод.р – продольное к линии визирования ускорение УР;
-
j р – поперечное к линии визирования ускорение УР;
-
φ р – текущее значение бортового пеленга вертолета с УР;
-
ψ р – текущее значение курса полета УР;
-
V ф – скорость перемещения фюзеляжа вертолета;
-
V л – линейная скорость вращения наступающей лопасти несущего винта вертолета;
-
j прод.ц – продольное к линии визирования ускорение вертолета;
-
j ц – поперечное к линии визирования ускорение вертолета;
-
φ ф – угол между линией визирования и линией пути фюзеляжа вертолета;
-
φ л – угол между линией визирования и вектором линейной скорости вращения наступающей лопасти несущего винта вертолета (≈180°);
(х ц , у ц ) - координаты вертолета (цели);
(x р , у р ) – координаты УР.
Скорость V ц полета вертолета можно представить в виде

где k – коэффициент, компенсирующий «ошибочное» принятие скорости лопасти за скорость вертолета в целом, определяется по формуле
где F др - частота Доплера, обусловленная собственной скоростью управляемой ракеты;
F дл - частота Доплера, обусловленная собственной линейной скоростью вращения наступающей лопасти несущего винта вертолета управляемой ракеты;
λ – длина волны.
Проецируя скорости V р и V ц на линию визирования и нормаль к ней, получаем

Подставляя (6) в (8), получаем
D® = К - ^ sm Фф + р ₽sm Фр■ (9)
Для упрощения примем допущение, что косинусы всех углов примерно равны единице, а синусы – своим аргументам.
Дифференцируя (9) по времени при V р =const получаем

. ^л-^фФф Мф+КрФр Dm
0) =-----
D D D
или
Так как 1 рфр = jp , Кффф = ;ф, а 1ф - Гф(рф = /продц, выражение (11) можно записать в виде
q V р "Р 7 пред ц 7ф / q ®
В случае, когда К ф ~0 (режим «висение»),
где 7продц -Т
Для определения изменения бортового пеленга вертолета в процессе наведения на него вертолета представим формулу (9) как
Дифференцируя (14) по времени при V р =const, получаем
Таким образом, на основании формул (12) и (15) динамическая модель, описывающая взаимное перемещение УР и вертолета при различном характере его полета, имеет следующий вид:
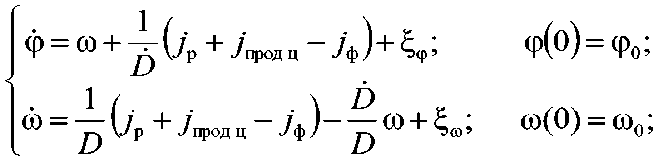
7>=-к„;
D(O) = Do;
Грц(0) = Грц0;
Упрод (°) = УпродО ’
К = / ■ рц 7прод ’
Упрод — _Фпрод + ^упрод ’ где ^w , ^j - центрированные гауссовские шумы, характеризующие случайные возмущения системы «УР-вертолет»; α – коэффициент, характеризующий маневренные свойства УР.
Данная динамическая модель взаимного перемещения УР и вертолета будет в дальнейшем положена в основу синтеза оптимального метода и алгоритма наведения УР на вертолет.
Синтез метода и алгоритма наведения ракеты на вертолет
Для синтеза закона управления ракетой необходимо иметь модель состояния (1), (2) и функционал качества в виде (5).
Исходя из того, что параметр управления – поперечное ускорение УР, вектор управления будет иметь вид и=Л +Уцродц-Уф- (18)
Требуемыми параметрами для управления ракетой, учитывающими управление ракурсом РЛ наблюдения в АРГС ракеты отраженных от вертолета РЛ-сигналов и угловой скоростью вращения линии визирования «УР-вертолет», являются фт и гот соответственно, т.е. вектор требуемых фазовых координат х т будет иметь вид
Управляемые параметры для системы самонаведения УР – φ и ω, т.е. вектор управляемых фазовых координат x у будет следующим:
Так как параметром управления служит боковое ускорение ракеты j р, а управляемыми параметрами - ф и го, то матрицу эффективности сигналов управления Ву образуют коэффициенты при векторе управления u в динамической модели (16):
.
Матрицы штрафов за точность наведения Q и величину сигналов управления K в формуле (4) с учетом размерности матриц (19)–(21) имеют вид
В результате функционал качества (5) принимает вид

Подставив (18)–(22) в (4), получим следующее соотношение:
или


Выполнение при синтезе условий линейно-квадратично-гауссовской задачи [10, 11] по- зволяет заменить истинные значения фазовых координат векторов хт и ху их оптимальными оценками, тогда алгоритм траекторного управления имеет вид
^j j рт Л ’
7рт — Г (фт — ф)— 7 А ® — 7прод ц "*" 7ф kjD kjD где Aj - параметр рассогласования, определяющий несоответствие текущего jр и требуемого jрт значений поперечного ускорения ракеты.
Учитывая, что , а выражение (27) в случае использования при наведении УР с АРГС доплеровских частот, обусловленных скоростью сближения УР с фюзеляжем вертолета, можно представить в виде

а при полете в режиме «висение», когда при наведении используются доплеровские частоты, обусловленные скоростями сближения УР с вращающимися лопастями несущего винта вертолета,
Для формирования сигналов управления в соответствии с алгоритмом (26) необходимо иметь оценки следующих координат:
-
- дальность D «ракета-вертолет» и скорость ее изменения;
-
- пеленг j вертолета с управляемой ракетой;
-
- угловая скорость w вращения линии визирования «УР-вертолет»;
-
- поперечное ускорение j ф фюзеляжа вертолета, либо продольное ускорение j прод.ц вертолета.
Анализ полученных моделей состояния, а также сравнительный анализ полученных метода и алгоритма наведения с алгоритмами наведения, представленными в [3, 4, 10–12], позволяют сделать следующий вывод: применение нового алгоритма траекторного управления при наведении ракеты на вертолет при различном характере его полета позволит обеспечить непрерывное наведение управляемой ракеты класса «воздух-воздух» с АРГС, независимо от того, измерима ли скорость вертолета в целом (доплеровская частота сигнала, отраженного от фюзеляжа) или только от вращающихся лопастей несущего винта вертолета. С этой целью необходимо обеспечить бессрывное сопровождение вертолета в АРГС по доплеровской частоте.
Техническое решение для обеспечения бессрывного сопровождения вертолета
Для эффективного функционирования синтезированного алгоритма наведения ракеты класса «воздух-воздух» с АРГС, определяемого выражением (27), в [15] предложено следующее техническое решение бессрывного сопровождения вертолета в АРГС ракеты.
На рис. 4 приведена блок-схема, поясняющая данное техническое решение, на рис. 5 ( а-е) -эпюры, поясняющие его.
Бессрывное сопровождение вертолета в АРГС ракеты заключается в следующем [15] .
На вход блока 1 БПФ (рис. 4) на промежуточной частоте с выхода приемника АРГС поступает сигнал S ( t ) (рис. 5а), отраженный от вертолета, который подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр S ( f ) (рис. 5 b ), составляющие которого обусловлены отражениями сигнала от фюзеляжа А ф сопровождаемого вертолета и вращающихся лопастей его несущего винта A i .
С выхода блока 1 БПФ (рис. 4) на первые входы пороговых устройств 2 и 3 поступают соответственно значения амплитуд А ф и Ai амплитудно-частотного спектра S ( f ) отраженного от
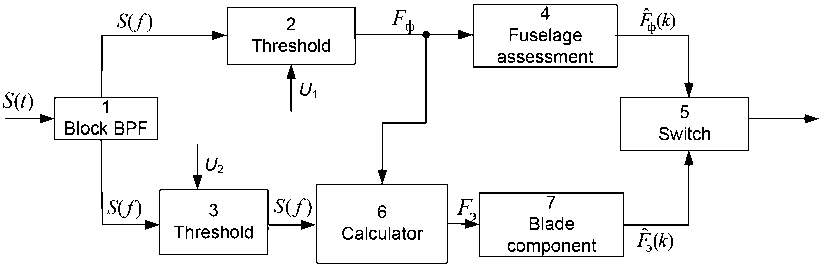
Рис. 4. Блок-схема
Fig. 4. Flowchart
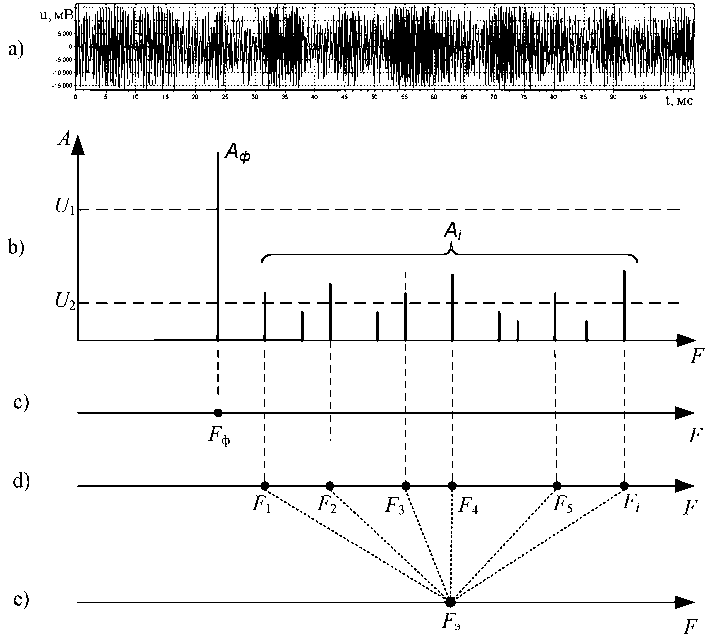
Рис. 5. Эпюры
Fig. 5. Diagrams вертолета сигнала. На их вторые входы подаются значения порогов U1 и U2. Причем значение порога U2 в n раз меньше значения порога U1.
В каждый k -й дискретный момент времени на выходе первого порогового устройства 2 определяется отсчет F ф доплеровской частоты (рис. 5 c ) спектральной составляющей с максимальной амплитудой А ф , превысившей первый порог U 1 и соответствующей отражениям сигнала от фюзеляжа вертолета, который подается (рис. 4) на вход первого фильтра 4-го сопровождения. В результате на его выходе формируется оценка рф ( k ) доплеровской частоты, которая поступает на первый вход коммутатора 5.
Одновременно с определением отсчетов F ф доплеровских частот, соответствующих отражениям сигнала от фюзеляжа вертолета, в каждый k -й дискретный момент времени определяются отсчеты F i амплитуд А i , превысивших второй порог U 2 и соответствующих отражениям сигнала от лопастей несущего винта вертолета (рис. 5 d ), за исключением спектральной составляющей с максимальной амплитудой А ф и соответствующей отражениям сигнала от фюзеляжа вертолета.
В вычислителе 6 (рис. 4) в соответствии с выражением
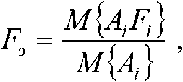
где М{…} – операция математического ожидания; Ai – i-я амплитуда спектральной составляющей сигнала, соответствующая отражениям сигнала от лопастей несущего винта вертолета, вычисляется один отсчет Fэ доплеровской частоты (рис. 5e), соответствующий энергетическо-– 839 – му центру отражений сигнала от лопастей несущего винта вертолета, который подается на вход второго фильтра 7 (рис. 4) сопровождения, где осуществляется фильтрация полученных отсчетов Fэ доплеровских частот, соответствующих энергетическому центру отражений сигнала от лопастей несущего винта вертолета, в результате чего на его выходе формируется оценка V (к) доплеровской частоты по отражениям сигнала от лопастей его несущего винта, которая поступает на второй вход коммутатора 5.
На выходе коммутатора 5 при наличии отсчетов F ф доплеровских частот спектральных составляющих, превысивших первый порог U 1 и соответствующих отражениям сигнала от фюзеляжа вертолета, формируется оценка Fh( к ) доплеровской частоты с выхода первого фильтра 4 сопровождения вертолета по отражениям сигнала от его фюзеляжа, а при наличии отсчетов F i доплеровских частот спектральных составляющих, превысивших второй порог U 2 и не превысивших первый порог U 1 - оценка / ,( к ) доплеровской частоты с выхода второго фильтра 7 сопровождения вертолета по отражениям сигнала от лопастей его несущего винта.
В результате обработки зарегистрированных реальных РЛ-сигналов, отраженных от различных типов отечественных вертолетов, установлено [7, 8, 13] следующее:
амплитуда спектральной составляющей сигнала, отраженного от фюзеляжа вертолета А ф , в 10-12 раз превышает амплитуды А i спектральных составляющих сигнала, отраженного от лопастей несущего винта вертолета, то есть величина порога U 2 должна быть меньше в 10-12 раз величины порога U 1 ;
диапазон доплеровских частот, занимаемый отражениями сигнала от лопастей несущего винта вертолета, составляет 8–12 кГц;
численное значение отсчета F э доплеровской частоты (рис. 5 e), соответствующее энергетическому центру отражений сигнала от лопастей несущего винта вертолета, вычисляемого в соответствии с выражением (30), отличается на 12-15 % от значения отсчета доплеровской частоты, вычисленного в виде математического ожидания отсчетов доплеровских частот амплитуд А i , то есть точность оценки доплеровской частоты У (k) выше относительно точности оценки доплеровской частоты, получаемой на основе фильтрации отсчетов доплеровской частоты, соответствующих математическому ожиданию отсчетов доплеровских частот амплитуд А i .
Выводы
-
1. На основе СТОУ в пространстве состояний синтезированы оптимальные по минимуму локального функционала качества метод и алгоритм наведения авиационной УР с АРГС на вертолет при различном характере его полета.
-
2. Предложено техническое решение по бессрывному сопровождению вертолета при различном характере его полета с учетом результатов летно-экспериментальных исследований информационных свойств РЛ-сигналов, отраженных от него.
Список литературы Алгоритм наведения управляемой ракеты класса «воздух-воздух» с активной радиолокационной головкой самонаведения на вертолет при различном характере его полета
- Будник А.С. Опыт применения вертолетов армейской авиации в локальных войнах и вооруженных конфликтах. Военная мысль, 2016, 4, 22-26
- Федосов Е.А. Авиация ПВО России и научно-технический прогресс: боевые комплексы и системы вчера, сегодня, завтра: монография. М.: Дрофа, 2004, 256 с.
- Анциферов А.А., Богданов А.В., Бондарев В.Н., Гарин Е.Н., Гончаров А.М., Кучин А.А., Лютиков И.В. Синтез оптимальных алгоритмов наведения летательных аппаратов на групповую воздушную цель, Журнал Сибирского федерального университета. Техника и технологии, 2017, 10(2), 169-182
- Богданов А.В., Филонов А.А., Ковалев А.А., Кучин А.А. и др. Методы самонаведения истребителей и ракет класса "воздух-воздух" на групповую воздушную цель: монография, Красноярск: Сиб. федер. ун-т, 2014, 168 с.
- Дудник П.И., Кондратенков Г.С., Татарский Б.Г., Ильчук А.Р., Герасимов А.А. Авиационные радиолокационные комплексы и системы, М.: ВВИА им. Н.Е. Жуковского, 2006, 1112 с.
- Сколник М.И. Справочник по радиолокации. В 2 кн. Кн. 1., М.: Техносфера, 2014, 672 с.
- Богданов А.В., Васильев О.В., Каневский М.И., Коротков С.С., Миронович С.Я., Кучин А.А., Анциферов А.А., Закомолдин Д.В. Результаты летно-экспериментальных исследований по оценке возможностей всестороннего распознавания воздушных целей в импульсно-доплеровской РЛС воздушного базирования в сантиметровом диапазоне волн. Успехи современной радиоэлектроники, 2016, 11, 174-179
- Аганин А.Г. Метод синтеза многоэтапного когерентного алгоритма обнаружения на основе экстремальной статистики. Информационно-измерительные и управляющие системы, 2008, 6, 9, 40-49.
- Богданов А.В., Горбунов С.А., Кучин А.А., Шпортко С.А. Точностные и вероятностные характеристики алгоритма распознавания режима полета вертолета в радиолокационной системе воздушного базирования. Журнал Сибирского федерального университета. Техника и технологии, 2018, 11(3), 358-370
- Верба В.С. и др. Информационно-измерительные и управляющие радиоэлектронные системы и комплексы: монография. М.: Радиотехника, 2020, 490 с.
- Меркулов В.И., Верба В.С., Ильчук А.Р. Автоматическое сопровождение целей в РЛС интегрированных авиационных комплексов. Теоретические основы. РЛС в составе интегрированного авиационного комплекса. монография в 3 т. Т. 1. М.: Радиотехника, 2018, 316 с.
- Меркулов В.И., Верба В.С., Ильчук А.Р., Колтышев Е.Е. Автоматическое сопровождение целей в РЛС интегрированных авиационных комплексов. Сопровождение одиночных целей, монография в 3 т. Т. 2. М.: Радиотехника, 2018, 486 с.
- Богданов А.В., Коротков С.С., Кучин А.А., Бондарев В.Н., Лютиков И.В. Концепция распознавания воздушных целей в авиационном радиолокационном комплексе. Журнал Сибирского федерального университета. Техника и технологии, 2016, 9(3), 319-331
- Гейстер С.Р., Нгуен Т.Т. Математические модели радиолокационного сигнала, отраженного от несущего винта вертолета, в приложении к обращенному синтезу апертуры. Изв. вузов Росcии. Радиоэлектроника, 2019, 22(3), 74-87
- Способ сопровождения вертолета в импульсно-доплеровской радиолокационной станции: патент 2728278, Российская Федерация. 2019, № 22. 2 с.
