Алгоритм обнаружения метеообразований по результатам первичной обработки в посадочном аэродромном радиолокаторе

Автор: Кхыонг Н.В.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Физика
Статья в выпуске: 2 (46) т.12, 2020 года.
Бесплатный доступ
Приведен алгоритм первичной обработки сигнала, отраженного от разных видов метеообразований (МО) в зоне ответственности посадочного радиолокатора (ПРЛ). Приводится краткий анализ результатов обработки и проведения эксперимента ПРЛ на полигоне. Делается вывод о возможности использования радиолокатора для обнаружения метеообразований.
Метеообразования, посадочный радиолокатор, карта помех, пороговая обработка, пространственная обработка, временная обработка, диаграмма направленности
Короткий адрес: https://sciup.org/142229671
IDR: 142229671 | УДК: 621.396
Algorithm for detecting meteorological events based on the results of primary processing in a landing aerodrome radar
This study investigates the algorithm for primary processing of a signal reflected from different types of meteorological events in the zone of responsibility of the landing radar (LR). A brief analysis of the results of processing and conducting the LR experiment on the test site is given. It is concluded that the radar can be used to detect weather patterns.
Текст научной статьи Алгоритм обнаружения метеообразований по результатам первичной обработки в посадочном аэродромном радиолокаторе
-
1. Введение
-
2. Первичная обработка принимаемого сигнала
Одной из важных задач обеспечения безопасностип полетов является обнаружение и распознавание опасных метеообразоваиий. Радиолокационные методы исследования облаков и осадков основаны на. обработке радиолокационного сигнала, отраженного и рассеянного частицами облаков и осадков. Как известно, процесс первичной обработки метеора-диолокационной информации заключается в обнаружении отраженного сигнала, от метеообразований, измерении их координат с соответствующей вероятностью и создание радиолокационной картины воздушной обстановки [1]. Поэтому рассмотрение сути первичной обработки радиолокационной информации является весьма актуальным.
«Московский физико-технический институт (национальный исследовательский университет)», 2020
В посадочном радиолокатре (ПРЛ) используется передающий модуль с антенной, который облучает вето зону ответственности ПРЛ в режиме постоянного излучения. Для приёма используются две цифровые фазированные антенные решётки ФАР (для измерения углов глиссады и курса), каждая из которых имеет набор плоских диаграмм направленности (ДН). Таким образом, каждая цель облучается передатчиком непрерывно, а две приёмные ФАР (каждая из которых имеет одновременно весь набор плоских ДН производят угловые измерения курса и глиссады. Взаимное расположение ДН передающей и приёмных антенн представлено на рис. 1.
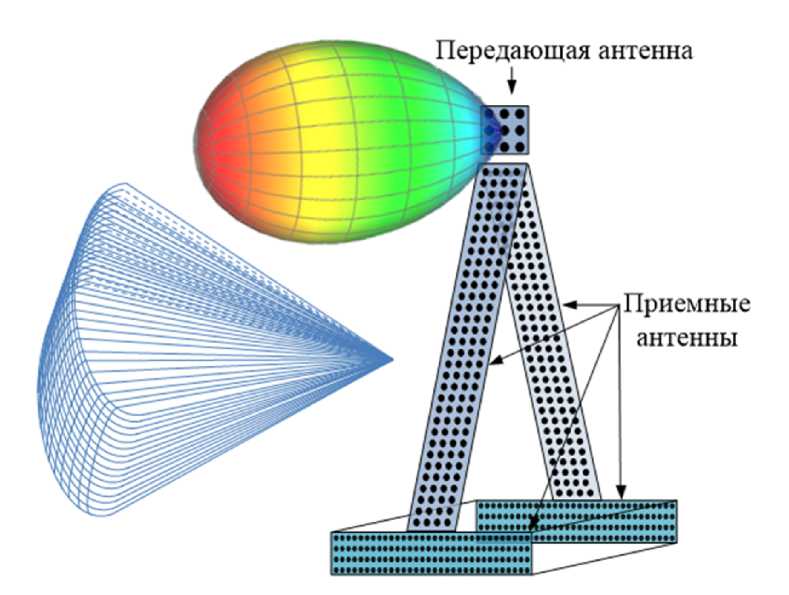
Рис. 1. Расположение ДН передающих и приемной антенн
Процесс первичной обработки сигнала, отраженого от метеообразований, заключается в получении информации о наличии/отсутствии целей [2] в зоне ответственности одновременно по курсу и глиссаде. Общая структура первичной обработки по курсу и глиссаде делится на два этапа и состоит из следующих функциональных блоков изделия:
-
- блок цифрового диаграммоформирования (БЦДФ) - выполняет пространственную обработку сигнала, формирует диаграммы направленности приемных фазированных антенных решеток (ФАР);
-
- крейт обработки (КО):
+ платы цифровой обработки сигнала (ЦОС) в составе крейта обработки (КО) реализуют первичную обработку сигнальных данных, формируют отметки о метеообразованиях;
+ вычислительные мощности самого КО задействованы для выполнения вторичной обработки и формирования информации о метеообразованиях. Функциональная схема представлена на рис. 2.
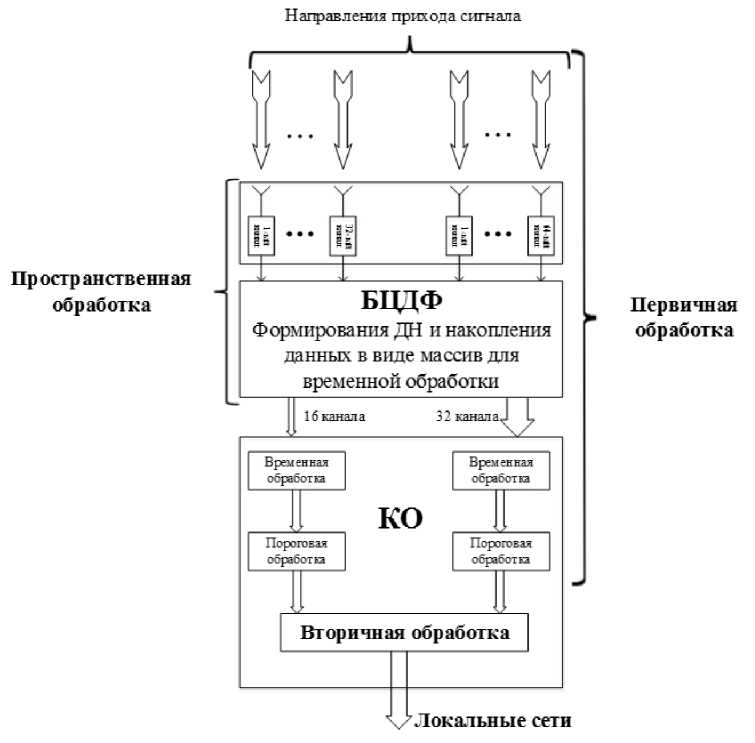
Рис. 2. Основные этапы обработки информации
Первый этап — Пространственная обработка сигнала
На данном этане выполняется формирование цифровой диаграммы направленности фазированных антенных решеток. Обработка сигнала представляет собой линейный синтез диаграммы направленности по методу быстрого преобразования Фурве на всех каналах.
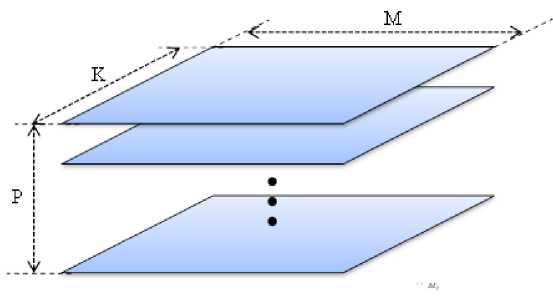
Рис. 3. Трехмерный массив данных
От антенного поста на спецвычислитель ЦОС поступает поток данных с 96 антенных модулей с частотой дискретизации F d = 2MHz. Выполнение пространственной обработки сигнала заключается в цифровом формировании веерной диаграммы направленности, закрывающей всю зону ответственности ПРЛ в течение одного временного дискрета (7Д = 0, 5 мкс).
На выходе блока пространственной обработки формируется массив данных, соответствующих амплитуде принятого с определенного направления отраженного сигнала от метеообразования. Размерность этих массивов - [К ][Р][М ] = 77 х 32 х 1625, г де К - число периодов развертки ЛЧМ-сигнала: Р = 32 - количество пространственных направлений; М - количество временных отсчетов за время развертки одной пилы ЛЧМ (1625 для первого типа ЛЧМ-сигнала). Вид массивов с их размерностями приведен на рис. 3.
Второй этап — Временная обработка сигнала
После пространственной обработки, выполняемой в ПРЛ на аппаратном уровне, происходит накопление информации для выполнения временной обработки сигнала. Временные отсчеты сигнала копятся по принципу FIFO - «первым пришёл - первым ушёл». Размер буфера FIFO одинаков для каждого из рассматриваемых направлений прихода эхо-сигнала. Алгоритм выполнения цифровой обработки сигнала в одном пространственном направлении заключается в выполнении двух циклов БПФ:
-
- БПФ по допплеровскому сдвигу частоты ( D = 128 точек) для всех временных отчетов М = 1625.
Y(k = 128Е^^ХИ k = 0...127,(1)
n =0
где
W^ = e-21^,(2)
-
- БПФ по дальности ( Н = 1024) для всех отсчетов доплера, полученных в результате выполнения первого цикла БПФ;
Z(k) = 1024Ew^Y(Ч k = 0...1023,(3)
n =0
где
-
2 7Г 72./у
w1024 = e 1024 ,(4)
При этом отметим, что поскольку алгоритмы, реализующие выполнение БПФ на платах цифровой обработки сигналов (ЦОС), оптимизированы для количества отсчетов, равного степени числа 2, то для первого цикла выполнения БПФ выборка из 77-и отсчетов дополняется нулями до 128-и отсчетов, а для второго цикла из исходной выборки (1625 отсчетов) в рассмотрение берутся только последние 1024.
Результатом выполнения данного шага алгоритма являются, по аналогии с входными данными, две пары трехмерных массивов данных (для действительной и мнимой частей). Размерность каждого полученного массива - [128] х [32] х [1024] точек.
Создание карты помех
Для каждого пространственного направления (луча ДН) формируется карта помех, позволяющая выполнять обнаружение объектов на фоне местных предметов и даже при наличии внутрисистемных помех. Ее формирование происходит в процессе накопления квадратов действительной и мнимой частей результатов БПФ, полученных после реализации как второй этап временной обработки сигнала.
Алгоритм формирования карты помех для одного канала следующий.
-
- При начале работы ПРЛ карта помех представляет собой текущую помехо-целевую обстановку в зоне ответственности ПРЛ; иными словами, в начале работы программы массивы данных, содержащие карту помех, представляют собой просто квадраты результатов двух циклов БПФ, которые сохраняются в памяти спецвычислителя.
-
- На выходе данного шага алгоритма должны быть сформированы два трехмерных массива размерностью [128] х [32] х [1048], содержащие соответственно действительную и мнимую части накопленной карты помех.
Выполнение пороговой обработки
Для результатов выполнения двух циклов БПФ по каждому из направлений ДН (в количестве 16 шт для угла места и 32 шт для азимута) в координатах «допплер-дальность» определяются те каналы, для которых сумма квадратов результатов обработки превышает соответствующее значение карты помех не менее, чем на 20 дБ по курсу и по глиссаде.

Рис. 4. Алгоритм первичной обработки информации для обнаружения МО
Иными словами, по каждому из рассматриваемых направлений для всей плоскости «дальность-допплер» в качестве потенциально возможной цели определяются те точки, для которых:
р х
1д( -^ ) 1 20д Б, (5)
Р 0
где РХ = (X^J )2 + (Х-™)2, и РХо = (W^6)2 + (-^т)2- г - координаты точки по оси дальности (г = 1... 1024), j - координаты точки по оси доплера (j = 1... 128).
Приведенные выше этапы обработки сигнальных данных лежат в основе алгоритма обнаружения и измерения параметров движения воздушных судов в зоне ответственности ИРЛ. Однако данный алгоритм может быть успешно применен также для обнаружения опасных метеообразований и измерения основных его характеристик и параметров движения. Структура данного алгоритма применительно к обнаружению и измерению параметров движения метеообразований приведена на рис. 4.
Действие алгоритма начинается с формирования потока входных данных, который может быть как получен напрямую с аппаратуры ПРЛ, так и загружен из файла (запись реальных или модельных данных). Затем выполняется формирование массива данных, соответствующих амплитуде принятого сигнала с определенного направления по азимуту и по углу места, определяются мощность сигнала и шум в виде трехмерных массива размерностью [128] х [32] х [1024], потом расчета ОСШ и сравнения с порогом. В случае превышения порога фиксируются значения частот, для которых порог был превышен, и амплитуд спектра, соответствующих данным частотам. Полученные числа формируют массив выходных данных, который будет передан далее для выполнения вторичной обработки. На последнем этапе производится корректировка карты помех (добавление к имеющемуся массиву данных текущего массива помехово-целевой обстановки, взвешенное суммирование), после чего начинается обработка следующего такта сбора сигнальных данных (со следующей секунды).
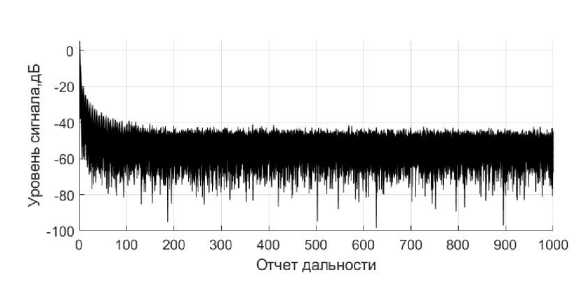
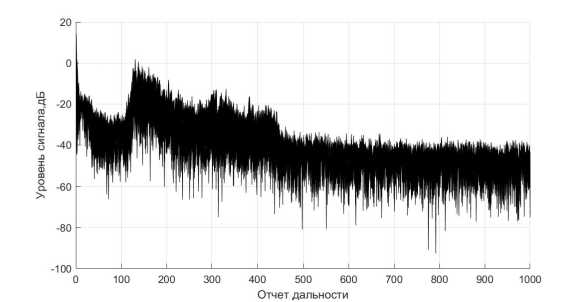
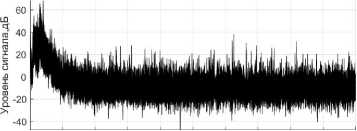
На рис. 5а, б представлены результаты первичной обработки принимаемых сигналов, полученных при помощи программного пакета MATLAB. На рис. 5а представлен уровень принимаемого сигнала при отсутствии метеообразования, а на рис. 56 - при наличии дождевого облака в зоне ответственности ПРЛ. Из приведенных графиков видно, что уровень отраженного сигнала при наличии метеообразования примерно на 10-20 дБ выше по сравнению с принятым сигналом без метеообразований в зоне ответственно (рисунок 5а, метеообразования отсутствуют), что позволяет выполнять обнаружение метеоцели даже без использования специальных алгоритмов.
а)
б)
Рис. 5. Уровень принимаемого сигнала при отсуствии облака (а), уровень принимаемого сигнала
при наличии облака в 16:00 десятого июля 2019 года (б)
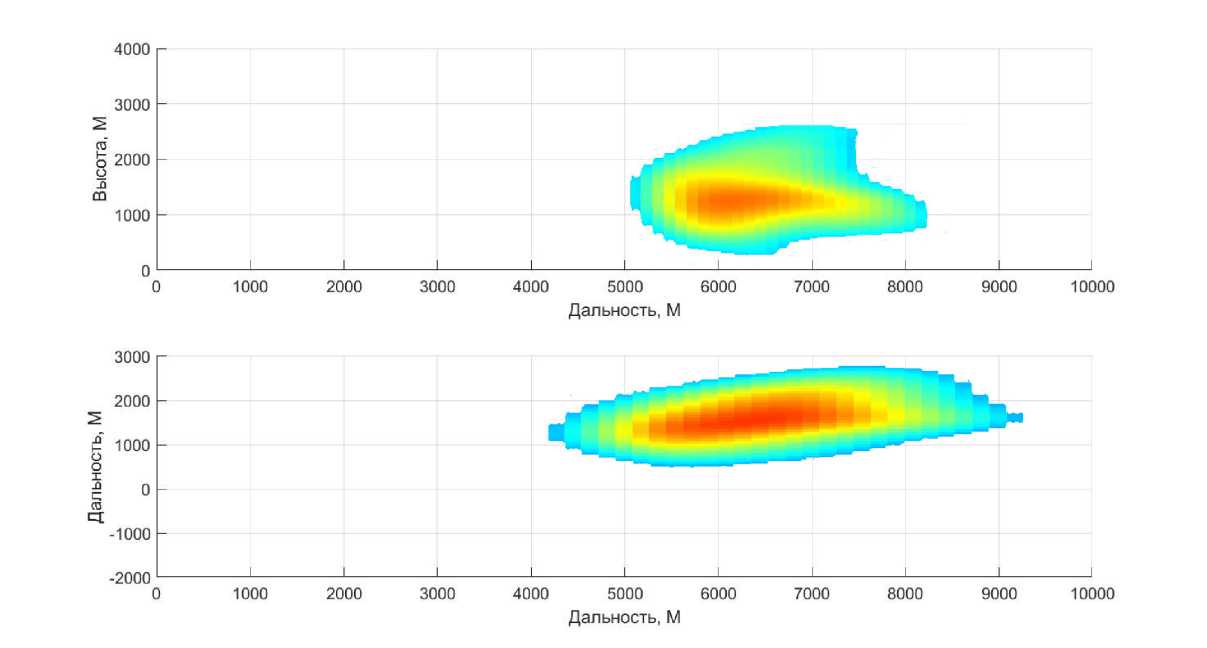
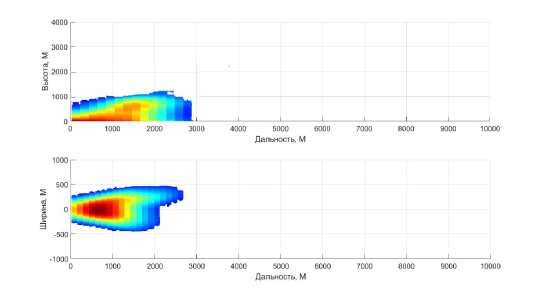
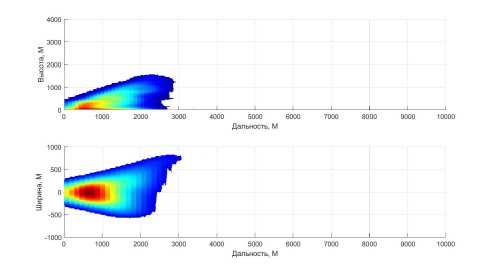
Рис. 6. Результат обработки принимаемого сигнала от дождевого облака в 16:00 десятого июля 2019 года
а)
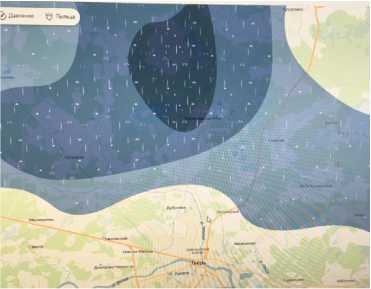
Рис. 7. Карта осадков в Тверской области на Яндекс.Погода (а) и фото облака в 16:00 (б)

б)
О 100 200 300 400 500 600 700 800 900 1000
Отчет дальности
0 100 200 300 400 500 600 700 800 900 1000
Отчет дальности
а)
б)
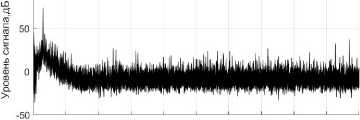
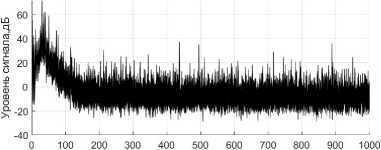
Рис. 8. Отношение сигнал/шум при наличии снега (а), результат обработки принимаемого сигнала от снега в 16:00 четвертого февраля 2020 года (б)
Отчет дальности
а)
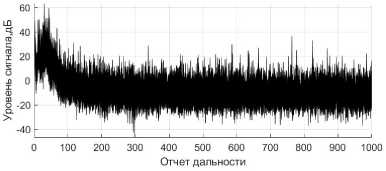
Рис. 9. Уровень принимаемого сигнала при наличии снега (а), результат обработки принимаемого сигнала от снега в 13:00 шестого февраля 2020 года (б)
б)
Результаты обработки принятых отражённых сигналов (в среде MATLAB) на рисунках 6, 8 и 9 отображают зоны метеообразований одновремено в декартовых координатах
«высота-дальность» и «ширина-дальность», соответствующие уровню отраженного от метеоцели сигнала угломестной и азимутальной приемных ФАР, относительно места расположения ПРЛ. На рис. 6 метеообразование расположено примерно посередине зоны ответственности ПРЛ на дальностях от 4,5 до 9 км с высотой от 0,4 до 2 км. Полученные результаты с высокой достоверностью согласуются с картой сервиса Яндекс.Погода (рис. 7а), полученной в момент проведения исследований, и с фактической метеоорологической обстановкой на тот момент времени (рис. 76). На рисунках 86 и 96 представлены графики уровней отраженных от снежного фронта сигналов, полученные в 16:00 4-го февраля и в 13:00 6-го февраля 2020 года в Тверской области при помощи ПРЛ. Как видно из представленных рисунков, снежный фронт располагался на дальности до 3 км относительно места расположения локатора. Разными цветовыми кодировками обозначены различные уровни принятых сигналов, по которым можно судить об интенсивности осадков.
По результатам проведенных на ПРЛ экспериментальных исследований можно сформулировать следующие выводы [5].
-
- Данный ПРЛ может обнаружить облака с осадками и снегом в зоне ответственности локатора на удалении до 40 км;
-
- Карта распределения осадков, полученная по данным ПРЛ, соответствует как карте сервиса Яндекс.Погода, созданной в тот же момент времени, так и фактическим метеообстановке и расположению облаков в зоне ответственности радиолокатора.
-
- Данные от ПРЛ дополняют картину распределения облачности, полученную по станционным наблюдениям, и дают информацию об облачности по территории.
-
3. Заключение
Таким образом, алгоритм обнаружения метеообразований по результатам первичной обработки заключается в получении информации о наличии/отсутствии МО зоне ответственности ПРЛ [2]. Полученные экспериментальные данные могут быть использованы в качестве исходных для оценки способности обнаружения метеорологических явлений на аэродроме. Данный посадочный радиолокатор, помимо непосредственной задачи контроля местоположения заходящего на посадку самолета, позволяет получать информацию о метеообразованиях в его зоне ответственности.
Список литературы Алгоритм обнаружения метеообразований по результатам первичной обработки в посадочном аэродромном радиолокаторе
- Брылёв Г.Б., Гашина С.Б., Низдойминога Г.Л. Радиолокационные характеристики облаков и осадков. Ленинград: Гидрометеоиздат, 1986. 234 с.
- Степаненко В.Д. Радилокация в метеорологии, 1966. 350 с.
- Кемайкин В.К., Демченко Н.А., Геенко А.А. Алгоритм обоснования параметров зондирующего сигнала для обнаружения малоскоростных и маловысотных целей // Software Journal: Theory and Applications, 2017. N 2.
- Довиак Р., Зрнич Д. Доплеровские радиолокаторы и метеорологические наблюдения. Ленинград: Гидрометеоиздат, 1988. 512 с.
- Кхыонг Н.В. Экспериментальная проверка способности обнаружения метеообразований новым посадочным радиолокатором // Труды МФТИ. 2020. Т. 12, № 1. С. 44-52.
