Алгоритм обработки изображений при фотограмметрических измерениях

Автор: Первунинских Д.В.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Электромагнитная совместимость и безопасность оборудования
Статья в выпуске: 4 т.8, 2010 года.
Бесплатный доступ
В статье рассмотрены специфика и варианты обработки изображений фотограмметрических измерений при съемке неметрической фотокамерой.
Измерения; метрологические параметры; калибровка; фотограмметрия; неметрическая фотокамера; концевые меры; обработка изображений; программное обеспечение; стереомодель
Короткий адрес: https://sciup.org/140191441
IDR: 140191441 | УДК: 654.9
Image processing algorithm during photogrammetric measurements
The article is devoted to the problem of specific character and variants of image processing of photogram-metric measurements during exposure with a non-metric camera.
Текст научной статьи Алгоритм обработки изображений при фотограмметрических измерениях
Наиболее часто при проведении фотограмметрических измерений используют стереоскопические фотоаппараты (неметрические фотокамеры). При этом делается два снимка одинаковыми объективами, выставленными в определенных направлениях.
Для вычисления результатов измерения в трехмерных координатах полагают следующие допущения [1]:
-
- точки размещения фотокамеры по горизонтальной оси симметричны ( х 1 = 0,5 b ; y = 0; z = 0 и x 2 = –0,5 b ; y = 0; z = 0; b – расстояние между центрами осей фотоаппаратов при съемке);
-
- оптическая ось фотоаппарата параллельна вертикальной оси z измерительной системы координат;
-
- оси x и y систем координат снимка и измерительной системы совпадают;
-
- отсутствуют искажения геометрии изображения (дисторсия).
Координаты точки объекта x , y , z определяются из подобия треугольников [1] путем нахождения координат отображений u и v на первом и втором снимках.
Решая систему уравнений (1), находим координаты точки объекта:
-Y = - - • (11 v + M2 ) ' — = - ■ (^ + «2 )--i
2 j 2 u7- uv b-f .
Разность u 2 – u 1 называется параллаксом точки; f – фокусное расстояние от центра объектива до плоскости изображения.
Постановка задачи
При использовании бытового фотоаппарата с неметрической камерой необходимо выпол- нить несколько снимков с разных положений и учесть координаты (XC, YC, ZC) и ориентацию (углы Эйлера: CO, к, ф) фотоаппарата в пространстве.
Трехмерные координаты и система уравнений (1) трансформируются в систему координат (СК), связанную с положением фотоаппарата, номером снимка k и номером точки i :
AX' -X^m^ -YcHA^ -ZkcH 7 (T -X>kzx +(У -Yk>kzy ^Z -xkM ’
Здесь коэффициенты mkxx , mkxy , mkxz , mkyx , mkyy , mkyz , mkzx , mkzy , mkzz – компоненты матрицы поворота M [2], определяемые углами co. ^, фк;
СО§ф-СО8К
м =
-cos^-sin/c
sin^
cos
co
• sin
к
+ sin
co
■ sin
ф
• cos
к
sin
к
■ sin
co -
cos
co
• sin
ф
• cos
к
cos
к •
cos
co
- sin
co
• sin
ф
• sin
к
cos
к
• sin
co
+ cos
co
• sin
ф
• sin
к
-sinty-cos^ cos^-cos
Для определения координат различных точек на различных снимках необходимо осуществить преобразование СК. При преобразовании необходимо учитывать вид преобразования и измеренных параметров. В зависимости от этого различают следующие варианты.
-
1. Преобразование одной СК в другую с использованием следующих сочетаний различных шести параметров:
-
- начало координат ( XC , YC , ZC ) и углы Эйлера ( co, к, ф) ориентации фотоаппарата в пространстве;
-
- вектор начала координат Х и базисные вектора Ех Еz по осям х и z ;
-
- углы ориентации CD, К, Ф в пространстве, определяющие матрицу поворота M [2].
-
2. Преобразование координат из внешней СК осуществляется [2] согласно системе уравнений:
-
3. Если две СК (СК1 и СК2) определены во внешней СК: (СК1: XC1 , M 1 ; СК2: XC2 , M 2 ), то преобразование из СК1 в СК2 будет иметь вид:
x’ = (x-Xc )mxx + (V - Yc )mxy + (z - Zc )mxz;
v = {x-Xc)myx + (y-Yc')m)y +(z - Zc)myzA4) z' = (x-Xc )mzx + (y - Yc >zy + (z - Zc )mzz.
Величины mxx , mxy … mzz – компоненты матрицы поворота M [2]. В векторном виде x = M(x-Xc) ; обратное преобразование x = Xc +M x .
x" = M2(XCi+Mkx'-XC2) . Взаимосвязь СК2 и СК1 определяется: M2,=M2Mf; ХС2|=М2(ХС2ад. По компонентам матрицы M 2 i определяются угловые параметры ориентирования ®2Ь ^21,^21 при переходе из СК2 в СК1.
Измерения размеров объектов сводятся к определению координат изображений одних и тех же точек объекта на разных снимках и решению системы уравнений (3). Определяются трехмерные координаты точек объекта и положения фотоаппарата в момент съемки. Важным моментом при обработке информации является наличие необходимого числа опорных точек с известными трехмерными координатами.
Решение задачи
Рассмотрим возможные варианты решения системы уравнений (3) с известным f .
-
1. Изображения одной и той же точки предмета, измеренные на двух снимках с известными параметрами ориентирования XC , YC , ZC , co, к, ф дают 4 уравнения, по которым можно определить трехмерные координаты точки ( X , Y , Z ).
-
2. Три точки с известными трехмерными координатами, измеренными на одном снимке, дают 6 уравнений. Можно определить параметры ориентирования снимка XC , YC , ZC , co, к, ф (внешнее ориентирование снимка).
-
3. Для пары снимков можно выбрать общую внешнюю систему координат, в которой уравнения имеют простой вид (1)-(2) (базисная система координат); сами изображения приводятся в эту систему координат проективным преобразованием плоскости. Преобразованные изображения образуют стереопару, по ней удобно выполнять измерения, можно наблюдать стереоизображение. Базисную систему координат можно определить по известным параметрам внешнего ориентирования снимков XC , YC , ZC , О), к, ф.
-
4. Пять точек с неизвестными трехмерными координатами, измеренные на двух снимках, дают 5×2×2–5×3 = 5 уравнений. Можно определить угловые положения одного снимка относительно другого и, следовательно, положения снимков относительно базисной системы координат этой пары снимков с точностью до расстояния между точками съемки (взаимное ориентирование пары снимков). Положение базисной системы координат относительно СК объекта остается неизвестным. По связанной таким образом паре снимков можно выполнить трехмерные измерения с точностью до масштаба.
При использовании неметрической фотокамеры требуется учесть ее внутренние параметры:
-
- положение главной точки u M , v M , то есть проекцию оптического центра объектива на плоскость изображения (она не обязательно совпадает с центром кадра);
-
- реальные фокусные расстояния по вертикали и горизонтали кадра (неквадратные пиксели) f U , f V ;
-
- нелинейные геометрические искажения, которые можно представить в виде разложения поправок по степеням измеренных на снимке координат [3-7]:
и = u + Dr,,,u + Db,_uvvuv +... , v' = v + Dv_m.y3 + Dvvuuvir +... , где ^U_UUU’ ^v_vvv – коэффициенты дисторсии.
В данном случае необходимо решение системы уравнений:
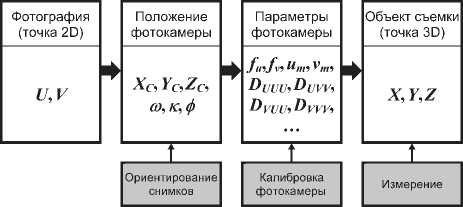
Структура решения уравнений (6) может быть представлена в виде, показанном на рис. 1. Систему (6) предлагается решать по частям.
-
1. Калибровка фотокамеры. Требуемые параметры камеры определяются заранее по снимкам калибровочных объектов с известной геометрией, предполагается, что параметры камеры сохраняются во время рабочих измерений. Возможно уточнение параметров по рабочим снимкам.
-
2. Ориентирование снимков. Выполняется связывание снимков по известным опорным точкам и, возможно, по некоторым точкам измеряемого предмета. Используются хорошо опознаваемые и надежно измеряемые точки. Оценивается точность полученной стереомодели.
-
3. Измерение точек предмета. Для удобства измерений могут формироваться стереопары.
Рис. 1. Структура решения уравнений
Заключение
В ходе работы были проведены измерения концевых мер вышеописанным способом. Концевые меры – это метрологические устройства, предназначенные для точного измерения геометрических размеров объектов, их метрологический параметр, в нашем случае – толщина, нормирован и подвергается периодической аттестации. Для проведения испытаний были взяты четыре типа мер с толщинами 6; 7; 8 и 9 мм. Тестовые объекты были сфотографированы в приспособлении, их фотографии подвергнуты обработке с помощью специального программного обеспечения (см. рис. 2). Контрольные точки устанавливались как на переднем плане фотоснимков, так и на заднем. Результаты измерений представлены в таблице 1.
Uik MM + ^U_UUUUA + ^U_UVVUikVik + ••• -
(X' -XkcWxx + (F - Гс )< + (^' - ZcК .
L (X‘-Хь)ткх + (Y' -Yk>ky+(Z- -ZkVzz ’
3 ((
Vik - vm + Dv_vvvVik + Dv_vuuVikUik + ••• =
(X- -Хкс>к^(У -Yk>ky+(Z‘-Zkc)rnkz
{X'-X^mkzx+(Yi-Yk)mkzx+{Zi-Z>kzz •
Таблица 1. Результаты измерений концевых мер
|
ю сЗ О 5 |
оЗ CI. S |
оЗ 5 |
^ сЗ о 5 |
|
|
Размеры меры, мм |
5,996 |
6,997 |
7,999 |
8,999 |
|
Результаты измерений, мм |
6,005 |
7,080 |
7,958 |
9,092 |
|
Погрешность, мм |
0,009 |
0,083 |
0,041 |
0,093 |

Рис. 2. Измерение концевых мер
Как видно из таблицы 1, погрешность измерения не превышает 100 мкм, что дает возможность использования подобных устройств для измерения размеров трехмерных объектов в оперативных условиях (например, при фиксации ДТП или летучем контроле деталей на производстве).
Список литературы Алгоритм обработки изображений при фотограмметрических измерениях
- Mikhail E., Bethel J., McGlone J.C. Introduction to Modern Photogrammetry. Wiley&Sons Inc., 2001. -450 p.
- Первунинских Д.В. Перспективы использования триангуляционного метода определения размеров трехмерных объектов//Современные технологии безопасности. М.: Вып. 3(22), июль-cентябрь, 2007. -С. 31-32.
- Назаров А.С. Фотограмметрия. М.: ТетраСистемс, 2006. -360 с.
- Форсайт Д. А., Понс Ж. Компьютерное зрение. Современный подход: Пер. с англ. М.: Вильямс, 2004. -928 c.
- Книжников Ю.Ф. Цифровая стереоскопическая модель местности. М.: Научный мир, 2004. -244 с.
- Русинов М.М. Инженерная фотограмметрия. М.: Недра, 1966. -248 с.
- Первунинских Д.В. Применение фотограмметрических триангуляционных методов в системах контроля и управления доступом//ИКТ. Т. 6. Спец. выпуск «Технологии безопасности и охраны», 2008. -С. 35-38.
