Алгоритм оценки положения лазерного луча матричным фотоприемником на фоне гауссовского шума с использованием полной достаточной статистики принимаемого рассеянного излучения

Автор: Козирацкий Ю.Л., Хильченко Р.Г., Меркулов Р.Е., Козирацкий А.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 3 т.14, 2021 года.
Бесплатный доступ
Разработан алгоритм оценки положения лазерного луча по рассеянной в атмосфере составляющей матричным фотоприемником на фоне гауссовского шума. В основу алгоритма положена теорема Лемана-Шеффе, позволяющая получить эффективные оценки параметров распределений с использованием полных достаточных статистик отчетов наблюдаемой реализации рассеянного лазерного излучения. Полученные оценки обеспечивают наилучшее качество оценивания параметров при любых конечных объемах выборки и не требуют дополнительных исследований.
Лазерный луч, матричный фотоприемник, полная достаточная статистика
Короткий адрес: https://sciup.org/146281794
IDR: 146281794 | УДК: 621.398 | DOI: 10.17516/1999-494X-0307
Algorithm for estimating the laser beam, matrix photo receiver on the background of the Gaussian noise using full sufficient statistics of the received scattered radiation
An algorithm for estimating the position of the laser beam by the component scattered in the atmosphere by a matrix photodetector against a background of Gaussian noise is developed. The algorithm is based on the Lehman-Scheffe theorem, which allows one to obtain effective estimates of the distribution parameters using complete sufficient statistics for reports of the observed implementation of scattered laser radiation. The obtained estimates provide the best quality of parameter estimation for any finite sample sizes and do not require additional studies.
Текст научной статьи Алгоритм оценки положения лазерного луча матричным фотоприемником на фоне гауссовского шума с использованием полной достаточной статистики принимаемого рассеянного излучения
Цитирование: Козирацкий, Ю. Л. Алгоритм оценки положения лазерного луча матричным фотоприемником на фоне гауссовского шума с использованием полной достаточной статистики принимаемого рассеянного излучения / Ю. Л. Козирацкий, Р. Г. Хильченко, Р. Е. Меркулов, А. А. Козирацкий // Журн. Сиб. федер. ун-та. Техника и технологии, 2021, 14(3). С. 265–271. DOI: 10.17516/1999–494X-0307
В математической статистике для отыскания эффективных оценок параметров распределений, обладающих полными достаточными статистиками, и функций от них успешно используется теорема Лемана-Шеффе [1–2]. На основе ее применения могут быть получены эффективные оценки параметров распределений и в тех случаях, когда наиболее эффективные оценки не существуют. К достоинству таких оценок следует отнести то, что они обеспечивают наилучшее качество оценивания параметров при любых конечных объемах выборки и не требуют дополнительных исследований. Указанная теорема может быть применена для решения задачи определения направления на источник лазерного излучения по проекции луча на приемной плоскости матричного фотопри-емного устройства (МФПУ), формируемой рассеивающей в атмосфере составляющей излучения.
Целью данной статьи является разработка алгоритма оценки положения лазерного луча по рассеянной в атмосфере составляющей матричным фотоприемным устройством на фоне гауссовского шума с использованием полной достаточной статистики.
Пусть в картинной плоскости МФПУ, представленной на рис. 1, наблюдается изображение проекции лазерного луча y ( x ), представляющее собой аддитивную смесь стационарного гауссова шума n( x ) с нулевым средним и дисперсией о2, и полезного лазерного излучения S ( x ), изменяющегося по линейному закону S ( x ) = a • x + b .
Рис. 1. Изображение проекции лазерного луча на картинной плоскости МФПУ
Fig. 1. Image of the laser beam projection on the MFP picture plane
Запишем выражение для принятой реализации смеси сигнала и шума:
y^ = 7](x) + S(x) = T](x) + a-x + b , (1)
где a – крутизна сигнала; b – постоянная составляющая.
Тогда неформализованная задача фильтрации входного сигнала (изображения) y ( х) от шумовой составляющей η( x ) сводится к определению эффективной оценки величин a и b и построению прямой S ( х ) в плоскости МФПУ.
Представим наблюдаемый процесс y ( х ) в виде вектора у = | 1у ,..., у уп j, где yj = y ( xi) -отсчеты значений напряжения (тока); соответствующие максимальному количеству фотоэлектронов (квантов), зафиксированных в строке j и столбце i МФПУ (рис. 1); j = 1,..., n, i = 1,..., n, n – объем выборок (совпадает с числом элементов по строкам и столбцам матрицы размером n x n).
Представляя размеры элемента матрицы А х , А у интервалами дискретизации принятых отсчетов по строкам и столбцам, запишем выражение для единичного j -го отсчета:
у} = ^y • у = ту(/ • Ах) + а • г • Ах + b
Будем считать, что отсчеты yj статистически независимы, а дисперсия шума о2 априорно неопределена.
Запишем совместную плотность распределения вероятностей вектора у:

Преобразуем плотность распределения вероятностей к виду, удобному для обоснования алгоритма оценки указанных параметров:
^(y) = И'(Щу)) = С(С)ехр^1Н1 +g2H2+g3H,y
где (.т = ■ig1,g2,g?y — вектор параметров с компонентами g 1 = —1/2 а 2, g 2 = а / у 2, g 3 = b / у 2; ; ; ;
– нормирующий множитель.
Плотность распределения вероятностей принадлежит экспоненциальному семейству, вектор ее параметров G при неизвестных значениях а , b, а2 принимает значения из области (–∞,0) × (–∞,∞) × (–∞,∞), т. е. содержит трехмерный интервал. Поскольку параметры a и b могут быть представлены в виде линейной комбинации моментов полной достаточной статистики H ( у ), то
L^jV^^ ^jZAx^j-l^^ , (5)
(Дх)'и(и + 1)(и-1) Лх-и(и-1)
где
а^^хУ п^п + 1)(2л? + 1) й-«Ах(« + 1)
6 + 2
, z х z х а -и • Хх(п + 1А m\yG^ = M уН3} =--------- + п-Ь.
Используя методические рекомендации, изложенные в [3, 4], эффективную оценку параметров a и b можно найти в виде линейной комбинации соответствующих компонентов полной достаточной статистики:
А Х1Н,-6Ьх(п^Х\Н3 ; (zXx)" и(и + 1)(и -1)
а 2Аг(2л + 1)Я3-6Я2 Хх-п\п -\^
Выражая статистики H 2 и H 3 в (6) и (7) через компоненты вектора у и его исходных наблюдений, получаем
6^(2/-и-1)Х^)
;
Ах-я(и + 1)(/7-1) 25L(2« + l-3/)X^) п^п -1)
Дисперсии оценок в этом случае могут быть определены с помощью выражений:

Применительно к матрице n × n для условий равенства Δ x = Δ y преобразуем полученные выражения к виду, удобному для построения структурной схемы обработки изображения, реализующей обоснованный алгоритм:
b =
4/7 + 2
п -n
'У/У^ .
/=1
Физический смысл входящих в выражения (11) и (12) величин поясняется на рис. 2.
При помощи среды моделирования MatLab Simulink представим выражения (11) и (12) в виде алгоритма оценки, на входе которого есть некая реализация принимаемого рассеянного лазерного излучения y ( x ) картинной плоскостью матричного фотоприемника, а на выходе – проекция полезного сигнала S ( x ) в виде линейной функции с параметрами и и b . Структура указанного алгоритма представлена на рис. 3.
Таким образом, на основе применения теоремы Лемана-Шеффе разработан алгоритм оценки положения лазерного луча в плоскости МФПУ. В качестве исследуемого процесса рассмотрена непрерывная реализация рассеянного в атмосфере лазерного излучения на фоне шума.
Указанная реализация достаточно обоснованно может быть представлена полной достаточной статистикой ее дискретных отсчетов, что является основным условием применения теоремы Лемана-Шеффе.
Рис. 2. Физический смысл величин, входящих в выражение оценки параметров а и b
Fig. 2. The physical meaning of the values included in the expression of the estimation of parameters и and b
– 269 –
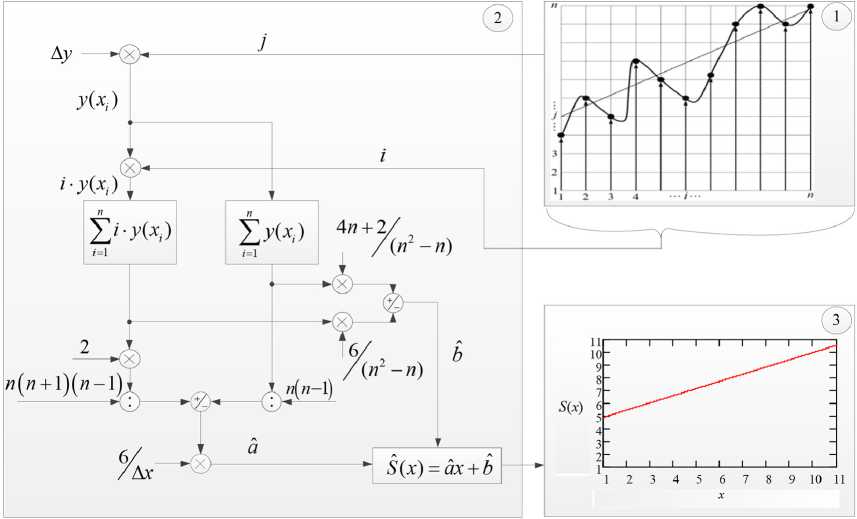
Рис. 3. Алгоритм оценки положения проекции лазерного луча
Fig. 3. Algorithm for estimating the position of the laser beam projection
На рис. 3 приняты следующие обозначения: 1 – реализация принимаемого рассеянного лазерного излучения y ( x ) картинной плоскостью МФПУ; 2 – алгоритм оценки положения лазерного луча; 3 – полученная проекция полезного сигнала S ( x ) в виде графика линейной функции с параметрами Cl и b .
Результатом работы алгоритма явились оценочные значения крутизны линейно изменяющейся функции полезного сигнала и постоянной составляющей этой функции. Подстановкой этих оценок в уравнение прямой происходит «восстановление» (избавление от шумовых флуктуаций) полезного сигнала. На рис. 3 с помощью графика (1) априорно заданного входного воздействия на приемную плоскость МФПУ после определения эффективных оценок Cl и b с помощью разработанного алгоритма получена проекция оси лазерного луча, которая идентична априорно заданной функции S ( x ).
Совместная обработка полученных оценок фотоприемниками в плоскостях, расположенных ортогонально относительно друг к другу [5, 6], позволяет оценить пространственное положение оптической оси лазерного луча в пространстве и определить направление на источник лазерного излучения.
Список литературы Алгоритм оценки положения лазерного луча матричным фотоприемником на фоне гауссовского шума с использованием полной достаточной статистики принимаемого рассеянного излучения
- Боровков А. А. Математическая статистика. М.: Наука, 1984. 472 с.
- Закс Ш. Теория статистических выводов. М.: Мир, 1975. 776 с.
- Богданович В. А., Вострецов А. Г. Теория устойчивого обнаружения, различия и оценивания сигналов. М.: Физматлит, 2004. 321 с.
- Патент № 2591589, МПК G01S17/06 (2006.01) Способ определения местоположения источника оптического излучения по рассеянной в атмосфере составляющей. Ю. Л. Козирацкий, А. Ю. Козирацкий, Е. И. Грохотов, П. Е. Кулешов, А. В. Кусакин, Е. А. Левшин, Р. Е. Меркулов - заявлено 30.12.2014; опубл. 20.07.2016, Бюл. № 20
