Алгоритм определения координат земных станций по сигналам, спутников-ретрансляторов

Автор: Волков Р.В., Саяпин В.Н., Севидов В.В., Севидова Л.М.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 10 (16), 2016 года.
Бесплатный доступ
Разработан алгоритм определения местоположения земных станций на плоскости, основанный на разностно-дальномерном и разностно-доплеровском способах. Сделаны выводы. Определены задачи дальнейшего исследования.
Координаты, временная задержка, частотный сдвиг
Короткий адрес: https://sciup.org/140267399
IDR: 140267399
Algorithm of determination of coordinates of ground stations for transponders signals
An algorithm is Developed to determine the location of earth stations in the plane, based on the range-difference and differential Doppler methods. Conclusions. Identified goals for future research.
Текст научной статьи Алгоритм определения координат земных станций по сигналам, спутников-ретрансляторов
В настоящее время отечественные комплексы радиомониторинга (КРМ), реализующие определение координат земных станций (ЗС) спутниковой связи по сигналам, принятым от спутников-ретрансляторов (СР) не эксплуатируются. Между тем нашли применение зарубежные КРМ, в ходе испытания которых были вскрыты следующие недостатки [1]: зависимость от производителя, закрытость системы, низкая оперативность, высокая стоимость, неэффективная топология КРМ.
Вышеуказанные недостатки накладывают существенные ограничения на использование зарубежных КРМ, что стимулирует разработку отечественных аналогов. Наиболее сложным этапом является создание алгоритма определения координат ЗС по сигналам от СР.
Для наглядности алгоритма определения координат ЗС по сигналам, принятым от СР рассматривается геометрическая основа на плоскости, (рис. 1.), включающая КРМ R ( xR , yR ), ЗС N ( xN , yN ), 1-й СР А ( x 1 , у 1 ), 2-й СР В ( x 2, у 2). Также изображены: V 1 , V 2 - скорости 1-го и 2-го СР соответственно; 0 1 N - угол между V 1 и направлением на ЗС; 0 1 R - угол между V 1 и направлением на КРМ; 02 N - угол между V 2 и направлением на ЗС; 02 R - угол между V 2 и направлением на КРМ; 0X и 0Y - оси координат.
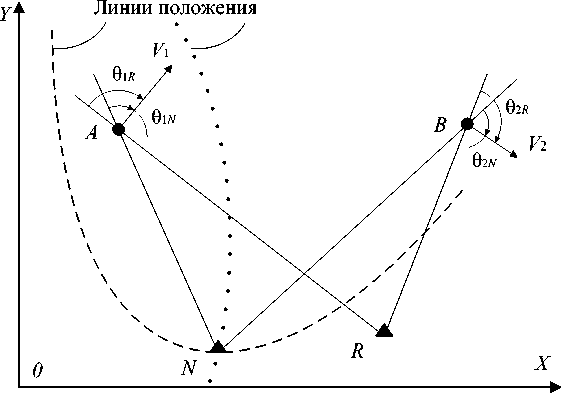
Рис. 1. Геометрическая основа алгоритма ОМП ЗС ССС
Зная координаты СР [2] и КРМ задача сводится к определению координат ЗС в наземном КРМ по сигналам, принятым от 1-го и 2-го СР, в ходе чего используется алгоритм, характерный для позиционных способов координатометрии.
Для построения линий положения возможно применить разностнодальномерный и (или) разностно-доплеровский способ [3, 4].
При разностно-дальномерном способе используется время задержки tЗ, вызванное разностью расстояний, прошедшим одним и тем же сигналом, излученным ЗС, через основной СР и зеркальный СР [5].
Возможно записать уравнение с двумя неизвестными x N , и y N :
7 (xi - xN )2 + (y - yN )2 + д/ (XR - x )2 + (yR - y )2 -
- V(x2 - xN )2 +(y2 - yN )2 - V(XR - x2 )2 +(yR - y2 )2 = ctЗ где c – скорость света.
Решением уравнения (1) будет гипербола с фокусами в точках A и B, показанная пунктиром (рис. 1).
В разностно-доплеровском способе используется доплеровское смещение частоты f D , вызванное движением СР относительно ЗС и КРМ. Частота сигнала, принимаемого КРМ от основного СР f 1 R равна:
f iR — f N + f 1 D + f iG + f ID , (2)
где: fN - частота сигнала, излучаемого ЗС; f ^ -доплеровский сдвиг за счет сближения (удаления) СР и ЗС; f.G - частота "подставки" 1-го СР; f р - доплеровский сдвиг за счет сближения (удаления) СР и КРМ.
Можно получить выражение связывающее углы 9 1 N и 9 2 N :
Л ( У(Сc + V cos62 )) - ЬсЛс 2 - V 2 )( С + V 2cos92 c 2 - V 2) c
2R 2 2R 2G 2 2 2N1
COSUi n — ..
(f1R (c + V1COS01R) - fG^c2 - V12)( c2 - V2)V1
Каждому значению 9 2 N может соответствовать единственное значение 9 1 N . Каждой паре 9 1 N и 9 2 N соответствует точка, принадлежащая линии положения, показанной штрихом (рис. 1).
При пересечении двух линий положения, полученных с помощью формул (1) и (3) получают координаты ЗС.
Для проверки адекватности разработанной модели было осуществлено имитационное моделирование на ЭВМ [6, 7]. Была произведена оценка точностных возможностей КРМ по определению координат ЗС с помощью раскрытого алгоритма [1].
Данная статья не закрывает рассматриваемую тему. Направлением дальнейших исследований может стать решение задачи, посвященной определению параметров движения ЗС [8] на основе разностнодоплеровских измерений различных реализаций одного и того же радиосигнала, принятого от нескольких СР.
Список литературы Алгоритм определения координат земных станций по сигналам, спутников-ретрансляторов
- Волков Р.В., Севидов В.В., Чемаров А.О. Точность геолокации разностно-дальномерным методом с использованием спутников-ретрансляторов на геостационарной орбите//Известия Санкт-Петербургского государственного электротехнического университета ЛЭТИ.
- Севидов В.В., Чемаров А.О. Определение координат спутников-ретрансляторов в разностно-дальномерной системе геолокации//Известия высших учебных заведений России. Радиоэлектроника. 2015. Т. 3. С. 41-47. 2014. № 9. С. 12-19.
- Волков Р.В., Саяпин В.Н., Севидов В.В. Модель измерения временной задержки и частотного сдвига радиосигнала, принятого от спутника-ретранслятора при определении местоположения земной станции//T-Comm: Телекоммуникации и транспорт. 2016. Т. 10. № 9. С. 14-18.
- Волков Р.В., Севидов В.В., Теслевич С.Ф. Математическая модель радиосигнала, принятого комплексом радиомониторинга от спутника-ретранслятора//Наукоемкие технологии. 2015. Т. 16. № 12. С. 44-49.
- Севидов В.В. Варианты реализации разностно-дальномерного метода определения координат земных станций по сигналам спутников-ретрансляторов. В сборнике: Радиотехника, электроника и связь III Международная научно-техническая конференция. 2015. С. 303-308.
- Севидов В.В. Определение координат и параметров движения источника радиоизлучения на основе разностно-временных и разностно-доплеровских измерений. Программы для ЭВМ. Базы данных. Топологии интегральных микросхем. 2015. № 11. С. 2.
- Севидов В.В., Волков Р.В., Саяпин В.Н. Модель движения искусственного спутника земли. Программы для ЭВМ. Базы данных. Топологии интегральных микросхем. 2016. № 2. С. 112.
- Кельян А.Х., Чемаров А.О., Волков Р.В., Севидов В.В. Определение параметров движения летательного аппарата системой геолокации по излучениям находящейся на его борту станции спутниковой связи//Успехи современной радиоэлектроники. 2016. № 5. С. 10-14.
