Алгоритм поиска оптимального плана решения транспортной задачи в сетевой форме

Автор: Сафина Г.Ф., Тухбатова Г.З.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Физико-математические науки
Статья в выпуске: 4-5 (91), 2024 года.
Бесплатный доступ
Исследована задача поиска оптимального решения классической транспортной задачи, которая сведена к сетевой форме динамического программирования. Условия задачи из транспортной таблицы переведены на граф с вершинами и ребрами с числовыми значениями данных. На конкретном примере показан алгоритм перевода метода получения опорного плана, метода потенциалов задачи с транспортной таблицей к задаче с сетевым графом. Указаны отличительные особенности методов, приведены правила поиска опорного плана в сетевом формате. Найдено решение задачи, проведена проверка решения на оптимальность также с помощью использования сетевого графа.
Транспортная задача, граф, метод потенциалов, сетевая форма, оптимальный план
Короткий адрес: https://sciup.org/170205003
IDR: 170205003 | DOI: 10.24412/2500-1000-2024-4-5-114-118
Algorithm for finding the optimal plan for solving a transport problem in network form
The problem of finding an optimal solution to the classical transport problem, which is reduced to a network form of dynamic programming, has been investigated. The conditions of the problem from the transport table are translated into a graph with vertices and edges with numerical data values. A specific example shows an algorithm for translating a method for obtaining a reference plan, a method for potentials of a task with a transport table, to a problem with a network graph. The distinctive features of the methods are indicated, the rules for searching for a reference plan in a network format are given. A solution to the problem was found, the solution was checked for optimality also using a network graph.
Текст научной статьи Алгоритм поиска оптимального плана решения транспортной задачи в сетевой форме
Рассмотрим классическую транспортную задачу с поиском оптимального распределения грузов от поставщиков потребителям на сетевой модели [1-4, 8]. Такая задача, заданная транспортной таблицей (с объемами грузов у поставщиков и требуемыми объемами грузов потребителей) имеет стандартные методы решения, например, метод формирования опорных планов, метод потенциалов для поиска оптимального плана решения, другие аналитические методы [5-7, 9].
В данном исследовании такая классическая задача переводится в сетевую форму и решается по технологиям использования методов на конечном графе [10]. Именно такую интерпретацию можно отнести к некоторому виду геометрического представления решения. Причем в сетевом виде отличительно формируются и проверяются условия (требования) известных аналитических методов, в том числе и метода потенциалов.
Итак, в сетевом представлении транспортной задачи в виде графа принимаем:
-
- вершины - поставщиками с объемами производимых a i ед. ( i = 1, m ) грузов (со знаком «+») или потребителями с требуе-
- мыми объемами bj ед. (j = 1, n) грузов (со знаком «-»);
-
- ребра - путями перевозок с указанными над ними тарифами c j перевозок в стоимостном плане от i- ого поставщика j- ому потребителю.
При сетевом варианте решения транспортной задачи методом потенциалов должны выполняться следующие требования и ограничения:
-
- груз от поставщиков вывозится полностью, и все потребности удовлетворяются также полностью;
-
- количество ребер (стрелок) меньше количества вершин (поставщиков и потребителей) на единицу;
-
- нет замкнутых контуров цепи, и в каждой вершине графа есть входящие и выходящие ребра (стрелки);
-
- допускается добавление ребер графа для фиктивных поставщиков или потребителей (при необходимости) с нулевой стоимостью.
Определение оптимального плана перевозок транспортной задачи в сетевой форме рассмотрим на примере конкретного графа с числовыми значениями (условиями) на вершинах и ребрах графа, представленного на рисунке 1.
По графу видим, что в вершинах: А 1 (I) и А 2 (II) – поставщики, В 1 (III), В 2 (IV),
В 3 (V) – потребители с указанными в них же соответствующими весами грузов.
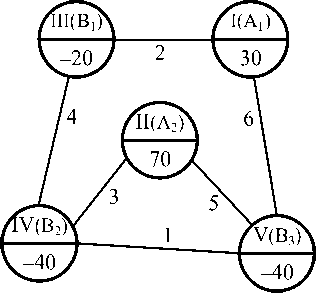
Рис. 1. Сетевой вид транспортной задачи
Заметим, что транспортная задача закрытая: суммарный груз поставщиков (30 ед. + 70 ед.) равен по абсолютной величине суммарным потребностям (40 ед. + 40 ед. + 20 ед.).
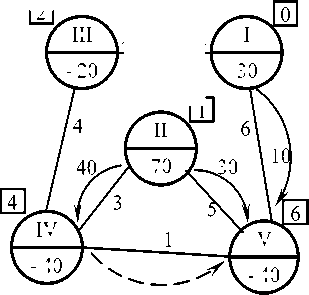
Первый опорный план в сетевом виде построен и представлен на рисунке 2, в котором перевозимые грузы с весами обозначены над выделенными стрелками.
III
I
–20
II
IV
V
–40
–40
Рис. 2. Первый опорный план
Для того чтобы проверить план на оптимальность, опишем и применим метод потенциалов для сетевой формы. Метод начинается с того, что одной из вершин (в нашем случае, вершине I (рис. 2)) задаем где ai, в - числа (потенциалы) каждой вершины графа.
Равенства (1) соответствуют поиску потенциалов для каждой базисной (заполненной) клетки задачи с условиями в виде транспортной таблицы. Число базисных клеток составляло бы m + n — 1, и (1) об- определенное значение потенциала (пусть 0). И далее определяем потенциалы других вершин сети (с учетом стрелок), используя стандартное правило метода:
a + в = cj, (1)
разовали бы систему из m + n уравнений с бесконечным множеством решений. Тогда поиск единственных значений потенциалов (единственного решения системы (1)) и подразумевает задание одного из значений потенциала, и при этом остальные значения потенциалов будут определяться однозначно.
В нашем случае сетевого вида задачи поступаем следующим образом: если стрелка выходит из вершины графа, то к потенциалу этой вершины добавляем (прибавляем) значение c этой стрелки, если же направление стрелки противоположно, то из потенциала вершины убираем (вычитаем) c .
Приведем наши расчеты потенциалов в соответствующих вершинах графа (они же для ребер без стрелок (в сетевом варианте метода потенциалов), что соответствует незаполненным клеткам транспортной таблицы задачи.
Для сетевого графа проверка неравенств (2) означает следующее: из большего потенциала вершины убирается (вычитается) меньший потенциал (другой связывающей вершины), и полученная разность убирается (вычитается) из показателя c тарифа, отвечающего ребру, связывающему вершины.
Приведем расчеты по неравенствам (2) для ребер графа без стрелок:
Δ 34 =4 – (4 – 2)=2,
Δ 45 =1 – (6 – 4)= – 1.
Видим, что Δ 45 отрицателен («отрицательная оценка»), значит, план пока не оптимален.
Нужно провести перераспределение грузов и получить новый опорный план. При этом в задаче, заданной транспортной таблицей, по методу потенциалов груз необходимо добавить в клетку с отрицательной оценкой.
В сетевом же виде такое добавление означает, что нужно «загрузить» ребро без стрелки с соответственной отрицательной оценкой и дорисовать к нему новую (пунктирную) стрелку, направленную от вершины с меньшим значением потенциала к вершине с большим значением. При указаны в квадратных рамках около вершин на рисунке 2):
– III: 0+2= 2 (стрелка выходит из I);
– V: 0+6= 6 (стрелка выходит из I);
– II: 6 – 5 = 1 (стрелка входит в V);
– IV: 1 +3 = 4 (стрелка выходит из II) .
Зная теперь потенциалы проверим полученный план на оптимальность, проверяя выполнение неравенств:
Δ ij = c ij - ( α i + β j ) ≥ 0 (2)
этом образуется замкнутый контур из стрелок.
В нашем примере такое перераспределение грузов с добавлением новой пунктирной стрелки от вершины IV к вершине V (отрицательная оценка у Δ 45 ) показано на рисунке 2.
При перераспределении грузов используем следующее правило:
– рассматриваются стрелки замкнутого контура с направлением, противоположным направлению новой стрелки;
– среди них находится стрелка с наименьшим тарифом ( х = min c ij ) ;
– найденное значение х прибавляется к тарифам c ij стрелок, имеющих то же направление, что и новая (пунктирная) стрелка, и вычитается из c ij стрелок с противоположным направлением;
– стрелка, по которой выбрано число х удаляется, общее количество стрелок остается прежним.
В нашем примере имеем: х = min c ij = 30, тогда тариф (стоимость) 30 добавляем от вершины II к вершине IV (30+40=70), прибавляется от вершины IV к вершине V (0+30=30), пунктирная стрелка становится сплошной. Тариф х, равный 30 убирается от II к V (30-30=0), поэтому соответствующая стрелка убирается.
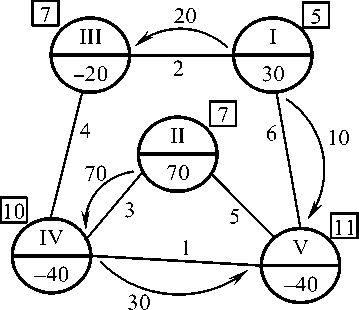
Рис. 3. Второй опорный план
Итоговый новый опорный план показан на рисунке 3. Проверим его на оптимальность. Для этого вычислили потенциалы с учетом (1), они выделены в квадратах рядом с вершинами графа (рис. 3) и проверили неравенства (2): Δ 34 =4 – (10 –
7)= 1, Δ 25 = 5 – (11 – 7)= 1 . Итак, новый план – оптимален.
Определим транспортные расходы задачи с учетом полученного плана:
20 ⋅ 2+10 ⋅ 6+30 ⋅ 1+70 ⋅ 3= 340 д.е.
Значит, оптимальный план перевозок в сетевой форме представлен на графе ри- сунка 3, по которому затраты на перевозки составят 340 д.е.
Проведенное исследование на конкретном примере показывает возможность поиска решения транспортной задачи в сетевой форме. Перевод аналитических методов (поиска опорного плана, метода потенциалов) в сетевой формат решения подразумевает также проверку условий оптимальности полученных планов также в графическом виде. Причем такой формат имеет особенности в применении стандартных аналитических методов, формируя свои динамические правила их использования.
Список литературы Алгоритм поиска оптимального плана решения транспортной задачи в сетевой форме
- Байдак В.Ю. Экономико-математические методы и модели. Учебно-методическое пособие. - Орел: ГОУ ВПО "ОГУ". - 2009. -125 с.
- Бауэрсокс Д.Дж., Клосс, Д.Дж. Логистика: интегрированная цель поставок / Пер. с англ. - М.: Олимп-Бизнес, 2001. - 225 с.
- Иванов Ю.П., Лотов А.В. Математические модели в экономике. - М.; Наука, 2003. - 453 с.
- Карманов В.Г. Математическое программирование. - М.: Наука, 2000. - 342 с. EDN: UGLIBN
- Ларионов Ю.И., Хажмурадов М.А., Кутуев Р.А. Методы исследований операций: Часть 1, 2010. - 312 с.
- Математика в экономике: учебник: в 2-х ч. / А.С. Солодовников, В.А. Бабайцев, А.В. Браилов, И.Г. Шандара. - М.: Финансы и статистика, 2006. - 244 с.
- Моисеев Н.Н., Иванов Ю.П., Столярова Е.М. Методы оптимизации. - М.: Наука, 2002. - 340 с.
- Пузанова И. А. Интегрированное планирование цепей поставок: учебник для бакалавриата и магистратуры. - М.: Юрайт, 2022. - 319 с.
- Романова М.В. Логистика: практикум. - М.: ФЛИНТА, 2020. - 144 с.
- Тухбатова Г.З., Сафина Г.Ф. Применение метода потенциалов для транспортной задачи в сетевой форме / В сборнике: Достижения и приложения современной информатики, математики и физики. Материалы IX Всероссийской научно-практической конференции. - Уфа, 2021. - С. 33-38. EDN: PQWPSO
