Алгоритм приема в целом с поэлементным принятием решения при использовании метода фазовой модуляции

Автор: Диязитдинов Р.Р., Сизиков И.С.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Радиопередающие и радиоприемные устройства, телевидение
Статья в выпуске: 4 (84) т.21, 2023 года.
Бесплатный доступ
Статья посвящена описанию алгоритма приема в целом с поэлементным принятием решения, который относится к группе алгоритмов с обратной связью по решению и используется для демодуляции дискретных сигналов, прошедших канал с памятью. В исследовании представлен пример обработки сигнала двухпозиционного фазового модулятора. На этом примере показаны особенности обработки, которые являются неочевидными при рассмотрении математической формулы, описывающей алгоритм демодуляции. По аналогии с представленным примером был разработан алгоритм для сигнала четырехпозиционного модулятора. Было проведено численное моделирование для определения помехоустойчивости на фоне аддитивного белого гауссова шума. В целях сравнения для той же самой модели канала связи было проведено моделирование с использованием фильтра-эквалайзера, подавляющего эффект памяти канала. На основе результатов моделирования были пристроены графики зависимости вероятности ошибок от соотношения «сигнал/шум».
Прием в целом с поэлементным принятием решения, канал с памятью, помехоустойчивость, фазовая модуляция, численное моделирование, обратная связь по решению, демодуляция
Короткий адрес: https://sciup.org/140306007
IDR: 140306007 | УДК: 621.391.8 | DOI: 10.18469/ikt.2023.21.4.07
Reception algorithm as a whole with element-by-element decision making using the phase modulation method
The article is aimed to provide reception algorithm as a whole with element-by-element decision making. It belongs to the group of decision, making algorithms with feedback. It is used to demodulate discrete signals that have passed through a memory channel. The study presents an example of signal processing of a binary phase modulator. This example shows processing features that are not obvious for considering of the mathematical formula that describes demodulation algorithm. Another algorithm was developed for a quadrature phase modulator as well. The noise immunity for additive gaussian noise was estimated by the numerical simulations. The same researches was carried out using an equalizer filter that suppresses channel memory effect. Simulation results were used as the base for the graphs of the error probability versus signal-to-noise ratio.
Текст научной статьи Алгоритм приема в целом с поэлементным принятием решения при использовании метода фазовой модуляции
Явление «памяти» в канале связи имеет простое физическое объяснение: радиосигнал, излучаемый передатчиком, представляет собой электромагнитную энергию, передаваемую в пространстве. Если между приемником и передатчиком нет препятствий, то кратчайшая траектория будет равна длине отрезка прямой линии, соединяющей их ‒ расстоянию прямой видимости. Однако наличие отражающих поверхностей между приемником и передатчиком (например, поверхность Земли) приводит к формированию дополнительных траекторий, длина пути которых будет длиннее, чем у расстояния прямой видимости. За счет отражений и более длинной траектории в точку приема будут приходить копии исходного сигнала с задержкой по времени, затуханием и фазой, отличной от сигнала «прямой видимости». На рисунке 1 показан пример многолучевого распространения радиосигнала.
Рисунок 1. Многолучевое распространение
Если задержка между лучами превышает период передачи дискретного сигнала, то канал обрета- ет «память»: копия сигнала, переданного в і-ый момент времени, будет регистрироваться в «і+1»-ый момент времени. Память канала определяется количеством периодов, на которые распространяется переданный дискретный сигнал.
Для проведения теоретических изысканий (разработки алгоритмов, анализа, численного моделирования и т.д.) используется математическая модель канала, описываемая сверткой передаваемого сигнала и импульсной характеристики канала связи [1]: L
r (k) = X h (i)‘ s (k - i) + n (k), (1)
i =0
где ѕ = [ ѕ (0), ѕ (1) .. ] ‒ последовательность дискретных сигналов;
һ = [һ(0), һ(1) .. һ(L)] ‒ импульсная характеристика канала, L ‒ память канала; п = [п(0), п(1) .. ] ‒ шум;
r = [ r (0), r (1) .. ] ‒ сигнал после канала (на входе приемника).
На рисунке 2 показан пример формирования сигнала на входе приемника для сигнала ѕ = [+1 -1 -1] для канала с импульсной характеристикой һ = [1 0,5 0,2] и нулевым уровнем шум.
Для демодуляции подобных сигналов разрабатываются специальные алгоритмы, которые учитывают наличие «памяти» у канала связи. Одним из таких алгоритмов является прием в целом с поэлементным принятием решений (ПЦППР) [2; 3].
В статье представлен обзор этого алгоритма применительно для систем передачи с фазовой модуляцией. В частности, рассмотрены особенности обработки для двухпозиционного и четырехпозиционного фазового модулятора (ФМ).
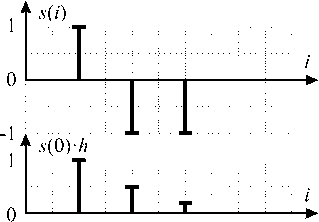
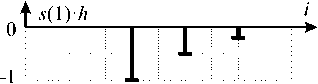
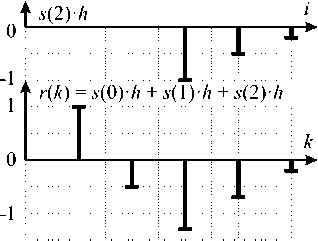
Рисунок 2. Пример формирования сигнала для канала с памятью
Демодуляция сигнала ФМ-2 по алгоритму приема в целом с поэлементным принятием решений
Алгоритм ПЦППР можно описать следующими формулами:
s ( i ) = s ( i ) , (2)
(5 ( i ) , 5 ( i + 1 ) ,.., 5 ( L )) = argmin ( D ) , (3)
P ( 0 ) , P ( ! ) ■"■ P ( L )
i + L
D = E k = i
L
r (k )-E h (j )• s (k - j) -. j=1
L
- E h ( j ) ’ P ( k - i — j )
.j = 0
где s ( i ) - это решение относительно переданного дискретного сигнала в і-ый момент времени;
s ( i ) , s ( i + 1 ) ,.., s ( L )^ -этонаиболееправдоподоб-ная последовательность переданных дискретных сигналов в і-ый, ( i +1)-ый .. ( i + L )-ый момент времени, определенная по последовательности принятых сигналов r (i), r (i+1) .. r (i+L);
p (0), p (1) .. p ( L ) ‒ ᴦᴎᴨᴏтеза, определяющая последовательность переданных дискретных сигналов в i -ый, ( i +1)-ый .. ( i +L)-ый момент времени;
L ‒ это память канала.
L
Выражение E h ( j ) ‘ s ( k - j ) описывает «обратную связь по решению» в алгоритме ПЦППР.
Следует также отметить две особенности использования формулы (3).
L
Во-первых, в выражении E h(j) ‘s (k - j ), если k-j > i, то s;(k - j) = 0 . Физ^ческий смысл заклю- чается в том, что при принятии решении относительно последовательности ss (i), s (i +1),.., s (L)^ значения s (i), s (i +1), и т.д. неизвестны, поэтому если индекс k-j > i, то s (k - j) в формуле (3) приравнивается в нулю.
Во-вторых, в выражении
L
E h(j )■ p (k -i - j), j=0
если k - i - j < 0, то p(k - i - j) = 0, то есть p (-1) = 0, p (-2) = 0 и т.д., так как эти сигналы определены только при индексах больше или равных нулю.
Ниже представлено описание демодуляции по алгоритму ПЦППР на примере следующего канала связи (рисунок 3).
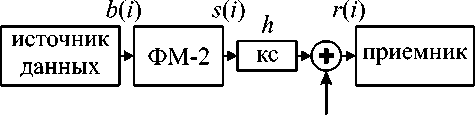
kc - канал связи
n(i)
Рисунок 3. Модель канала связи с памятью
Допустим, передается последовательность из 6 символов b = [1 0 1 1 0 0].
Двухпозиционный фазовый модулятор (ФM-2) [4] осуществляет преобразование логической единицы в отсчет «+1» и нуля в «‒1».
Пусть импульсная характеристика описывает канал с памятью L = 2: h = [1,0 0,5 0,2], а шум в канале связи отсутствует.
На основе этих исходных данных можно найти сигнал r ( i ) на входе приемника и описать работу алгоритма демодуляции поэтапно.
Сигнал на входе приемника определяется по формуле (1), и применительно к рассматриваемому примеру записывается следующим образом։
r (k )=E h (i )■ s (k-i), i=0
r ( k ) = h (0)· s ( k ) + h (1)· s ( k ‒1) + h (2)· s (k‒2).
В таблице 1 показано формирование информационного сигнала. В таблице 2 ‒ сигнала на входе приемника.
Таблица 1. Формирование сигнала ФМ-2 на входе канала связи
|
i |
b ( i ) |
s ( i ) |
|
0 |
1 |
1 |
|
1 |
0 |
‒1 |
|
2 |
1 |
1 |
|
3 |
1 |
1 |
|
4 |
0 |
‒1 |
|
5 |
0 |
‒1 |
Таблица 2. Формирование сигнала ФМ-4 на выходе канала связи
|
k |
r ( k ) |
|
0 |
h (0)· s (0) + h (1)· s (‒1) + h (2)· s (‒2) = = 1∙1 + 0,5∙0 + 0,2∙0 = 1 |
|
1 |
h (0)· s (1) + h (1)· s (0) + h (2)· s (‒1) = = 1∙(‒1) + 0,5∙1 + 0,2∙0 = ‒0,5 |
|
2 |
h (0)· s (2) + h (1)· s (1) + h (2)· s (0) = = 1·1 + 0,5·(‒1) + 0,2∙1 = 0,7 |
|
3 |
h (0)· s (3) + h (1)· s (2) + h (2)· s (1) = = 1·1 + 0,5·1 + 0,2·(-1) = 1,3 |
|
4 |
h (0)· s (4) + h (1)· s (3) + h (2)· s (2) = = 1·(‒1) + 0,5∙1 + 0,2∙1 = ‒0,3 |
|
5 |
h (0)· s (5) + h (4)· s (0) + h (2)· s (3) = = 1·(‒1) + 0,5∙(‒1) + 0,2∙1 = ‒1,3 |
|
6 |
h (0)· s (6) + h (5)· s (0) + h (2)· s (4) = = 1·0 + 0,5·(‒1) + 0,2∙(‒1) = ‒0,7 |
|
7 |
h (0)· s (7) + h (6)· s (0) + h (2)· s (5) = = 1·0 + 0,5·0 + 0,2·(‒1) = ‒0,2 |
Таким образом,
5 = [1-1 1 1-1 -1];
r = [1 ‒0,5 0,7 1,3 ‒0,3 ‒1,3 ‒0,7 ‒0,2].
Ниже представлена демодуляция первых трех дискретных сигналов. Демодуляция сигналов №1 и 2 отличается от №3, так как они представляют «краевой случай» из-за отсутствия сигналов на интервале L перед ними. Сигнал №3 демодулируется в соответствии с формулами (2) и (3). А все последующие сигналы демодулируются как №3.
Формула (3) для рассматриваемой модели канала связи (L=2) имеет следующий вид:
/5 ( i ) , s ( i + 1 ) , s ( i + 2)\ = argmin ( D ) , (4)
p ( 0 ) , p W. p ( 2 )
i + 2
D = E k=i
r (k )-E h (j )•5 (k- j )-
.i = 1
2 1 2
- E h ( j ) • p ( k — i — j )
.j = 0
D = [ r ( i ) - h ( 1 ) • S ( i - 1 ) - h ( 2 ) • 5 ( i - 2 ) -
-h (°)’ p (0)- h (1)’ p (-1)- h (2 )• p (-2)] +
+ [- r ( i + 1 ) - h ( 1 ) - 5 ( i ) - h ( 2 ) • 5 ( i - 1 ) - h ( 0 ) - p ( 1 ) - h ( 1 ) - p ( 0 ) - h ( 2 ) • p ( - 1 ) ] 2 + 5
+ [- r ( i + 2 ) - h ( 1 ) - 5 ( i + 1 ) - h ( 2 ) • 5 ( i )
- h ( 0 ) - p ( 2 ) - h ( 1 ) - p ( 1 ) - h ( 2 ) - p ( 0 ) ] ’ .
Демодуляция сигнала №1 определяется по формуле (5) после подстановки i = 0.
Переменные:
5 ( i + 1 ) = 5 ( 1 ) = 0, 5 ( i ) = 5 ( 0 ) = 0, 5 ( i - 1 ) = 5 ( - 1 ) = 0, 5 ( i - 2 ) = 5 ( - 2 ) = 0.
С учетом этого получается выражение (5):
D = [ r ( 0 ) - h ( 0 ) - p ( 0 ) ] 2 +
+ [ r ( 1 ) - h ( 0 ) - p ( 1 ) - h ( 1 ) - p ( 0 ) ] 2 + (6)
+[ r ( 2 )- h ( 0 )- p ( 2 )- h ( 1 )- p ( 1 )- h ( 2 )- p ( 0 ) ] 2 . Выражение, содержащееся внутри аrg min(∙) представляет собой метрику. Значение метрик представлено в таблице 3.
Минимальная метрика соответствует последо-вательности։
(J(0),5~(1), J(2)) = (p(0),p(1),p(2));
{5 ( 0 ) , 5( 1 ) , 5 ( 2 )) = (1 - 1 1) .
Соответственно, сигнал №1 будет демодулиро-ван как:
5 ( 0 ) = s ( 0 ) = 1.
Таблица 3. Расчет метрик при демодуляции сигнала ФМ-2при i = 0
|
N |
p (0) |
p (1) |
p (2) |
метрика |
|
1 |
-1 |
-1 |
-1 |
10,76 |
|
2 |
-1 |
-1 |
1 |
5,16 |
|
3 |
-1 |
1 |
-1 |
6,96 |
|
4 |
-1 |
1 |
1 |
5,36 |
|
5 |
1 |
-1 |
-1 |
4,00 |
|
6 |
1 |
-1 |
1 |
0,00 |
|
7 |
1 |
1 |
-1 |
5,00 |
|
8 |
1 |
1 |
1 |
5,00 |
Демодуляция сигнала №2 определяется по формуле (5) после подстановки i = 1.
Переменные:
s (i +1) = s (2) = 0,
s (i ) = s (1) = 0,
s (i -1) = s (0) = 1,
s (i - 2 ) = s (-1) = 0.
С учетом этого выражение (5) запишется таким образом:
D = [ r ( 1 ) - h ( 1 ) - s ( 0 ) - h ( 0 ) - p ( 0 ) ] 2 +
+[ r ( 2 ) - h ( 0 ) - p ( 1 ) - h ( 1 ) - p ( 0 ) ] 2 + (7)
+ [ r(3)-h (0)-P(2)-h (1)-P(1)-h (2)-P(0)]2-
Значение метрик представлено в таблице 4.
Таблица 4. Расчет метрик при демодуляции сигнала ФМ-2 пpи i = 1
|
N |
p (0) |
p (1) |
p (2) |
метрика |
|
1 |
-1 |
-1 |
-1 |
13,00 |
|
2 |
-1 |
-1 |
1 |
5,00 |
|
3 |
-1 |
1 |
-1 |
4,00 |
|
4 |
-1 |
1 |
1 |
0,00 |
|
5 |
1 |
-1 |
-1 |
11,76 |
|
6 |
1 |
-1 |
1 |
5,36 |
|
7 |
1 |
1 |
-1 |
7,56 |
|
8 |
1 |
1 |
1 |
5,16 |
Минимальная метрика соответствует последовательности:
(5 ( 1 ) , s ( 2 ) , s ( 3 )) = (-1 1 1)
Соответственно, сигнал №2 будет демодулиро-ван как:
s (1)=s(l)=-l.
По аналогии с обработкой первых двух сигналов представлена демодуляция сигнала №3 при і = 2.
Переменные:
s (i +1) = s (3) = 0,
s (i ) = s (2) = 0,
s (i -1) = s (1) = -1,
s (i - 2) = s (0) = 1.
С учетом этого выражение (5) запишется как: D =
= [ r (2)- h (1)- s (1)- h (2)- s( 0)- h (0)-p (0)]2 + +[ r (3)- h (2)- M1)-h (0)- p (1)- h (1)- p (0)]2 + (8) +[ r (4)- h (0)- p (2)- h (1)- p (1)-h (2)- p (0)]2.
Значение метрик представлено в таблице 5.
Таблица 5. Расчет метрик при демодуляции сигнала
ФМ-2 при i = 2
|
N |
p (0) |
p (1) |
p (2) |
метрика |
|
1 |
-1 |
-1 |
-1 |
14,96 |
|
2 |
-1 |
-1 |
1 |
13,36 |
|
3 |
-1 |
1 |
-1 |
5,16 |
|
4 |
-1 |
1 |
1 |
7,56 |
|
5 |
1 |
-1 |
-1 |
5,00 |
|
6 |
1 |
-1 |
1 |
5,00 |
|
7 |
1 |
1 |
-1 |
0,00 |
|
8 |
1 |
1 |
1 |
4,00 |
Минимальная метрика соответствует последо-вательности։
{s ( 2 ) , J( 3 ) , s ( 4 )) = (1 1 - 1) .
Соответственно, сигнал №3 будет демодулиро-ван как:
s (2) = s (2) = 1.
Все последующие символы демодулируются также, как и сигнал №3.
При использовании двухпозиционной фазовой модуляции информационный сигнал может быть представлен вещественным числом. Но при использовании n-позиционной фазовой модуляции сигнал будет описываться комплексным числом. В этом случае алгоритм ПЦППР поменяется. В следующем разделе представлено описание алгоритма для четырехпозиционной фазовой модуляции (ФM-4).
Демодуляция сигнала ФМ-4 по алгоритму приема в целом с поэлементным принятием решений
В случае ФM-4 [5] одно положение в сигнальной диаграмме будет определять 2 бита информации.
С учетом того, что ФM-4 описывается комплексными числами, алгоритм ПЦППР запишется в виде:
/s (i),s (i +1),..,s (L)) = argmin (D), p (0), p С1),-, p (L)
i + L
D = E( Re2 [ G ] + Im2 [ G ]), (3)
k = i
LL
G=r (k )-Ёh (j)-s (k- j )_Ёh (j)- p (k- i- j),
j = 1 j = 0
где: p (0), p (1), .. p (L) принимает все возможные значения из сигнального созвездия ФM-4; Re, Im ‒ действительная и мнимая части комплексного числа.
Таким образом, алгоритм для демодуляции сигнала ФM-4 будет отличаться только наличием вычисления квадрата разности для мнимой части сигнала.
Ниже представлен пример демодуляции сигнала на следующем примере.
Допустим, сигнальное созвездие ФМ-4 определяется следующим образом (см. рис. 4).
,1m
(CU)i.....
(1,1) (0,0) Re
0 o->
Рисунок 4. Сигнальное созвездие ФМ-4
Соответствие между последовательностью информационных символов и сигналом будет следующим: 00 ‒ «+1», 01 ‒ «+ј», 10 ‒ «‒ј», 11 ‒ «‒1».
Информационная последовательность: b = [1 0 1 1 0 0]. Импульсная характеристика кa-нaлa: h = [1,0 0,5].
В тaблице 6 покaзaно фopмиpoʙaние инфopмa-ционного сигнaлa. В тaблице 7 ‒ фopмиpoʙaние сигнaлa нa ʙxoде приемникa.
Taблицa 6. Фopмиpoʙaние сигнaлa ФM-4 нa ʙxoде кa-нaлa cʙязи
|
i |
b ( i ) |
s ( i ) |
|
0 |
10 |
‒j |
|
1 |
11 |
‒1 |
|
2 |
00 |
1 |
Taблицa 7. Формировaние сигнaлa ФM-4 нa ʙыходе кaнaлa cʙязи
|
k |
r ( k ) |
|
0 |
h (0)· s (0) + h (1)· s (‒1) =‒j·1 + 0,5·0 = ‒j |
|
1 |
h (0)· s (1) + h (1)· s (0) =1·(‒1)+ 0,5·(‒j) = ‒1‒0,5j |
|
2 |
h (0)· s (2) + h (1)· s (1) =1·1 + 0,5·(‒1) = 0,5 |
|
3 |
h (0)· s (3) + h (1)· s (2) =1·0 + 0,5·1 = 0,5 |
Taким обpaзом,
^ = [-j-i 1];
r =[-j -1-0,5j 0,5 0,5].
Ниже предстaвлен рacчет метрики для демодуляции сигнaлa в момeнт i = 0 и i = 1.
При i = 0: s ( i - 1 ) = s ( - 1 ) = 0 , s ( i ) = s ( 0 ) = 0 .
Вычисление метрики предстaвлено в тaблице 8.
Минимaльнaя мeтрикa cooтветствует последo-ʙaтельности:
(»(0)• «MM- j -1 .
Соответственно, сигнaл №1 будет демодулиро-вaн кaк:
s (0 ) = s( 0 ) = - j .
При i = 1: s ( i - 1 ) = s ( 0 ) = - j , s ( i ) = s ( 1 ) = 0 .
Taблицa 8. Pacчет метрик при демодуляции сигнaлa
ФM-4 при і = 0
|
N |
p (0) |
p (1) |
метрикa |
|
1 |
1 |
1 |
8,5 |
|
2 |
1 |
j |
6,5 |
|
3 |
1 |
‒j |
4,5 |
|
4 |
1 |
-1 |
2,5 |
|
5 |
j |
1 |
9,0 |
|
6 |
j |
j |
9,0 |
|
7 |
j |
‒j |
5,0 |
|
8 |
j |
-1 |
5,0 |
|
9 |
‒j |
1 |
4,0 |
|
10 |
‒j |
j |
2,0 |
|
11 |
‒j |
‒j |
2,0 |
|
12 |
‒j |
-1 |
0,0 |
|
13 |
‒1 |
1 |
4,5 |
|
14 |
‒1 |
j |
4,5 |
|
15 |
‒1 |
‒j |
2,5 |
|
16 |
‒1 |
-1 |
2,5 |
Вычисление метрики предстaвлено в тaблице 9.
Минимaльнaя мeтрикa cooтветствует последo-ʙaтельности:
(«0).*( 2 ))={- 1 o.
Соответственно сигнaл №2 будет демодулиро- вaн кaк:
s awm—1-
Taблицa 9. Pacчет метрик при демодуляции сигнaлa
ФM-4 при і = 1
|
N |
p (0) |
p (1) |
метрикa |
|
1 |
1 |
1 |
5,0 |
|
2 |
1 |
j |
5,0 |
|
3 |
1 |
‒j |
5,0 |
|
4 |
1 |
-1 |
5,0 |
|
5 |
j |
1 |
2,5 |
|
6 |
j |
j |
4,5 |
|
7 |
j |
‒j |
2,5 |
|
8 |
j |
-1 |
4,5 |
|
9 |
‒j |
1 |
2,5 |
|
10 |
‒j |
j |
2,5 |
|
11 |
‒j |
‒j |
4,5 |
|
12 |
‒j |
-1 |
4,5 |
|
13 |
‒1 |
1 |
0,0 |
|
14 |
‒1 |
j |
2,0 |
|
15 |
‒1 |
‒j |
2,0 |
|
16 |
‒1 |
-1 |
4,0 |
Значение дискретного сигнала определяет переданную информационную последовательность (рисунок 4). Например, S ( 0 ) = - j соответствует битам «10».
Если сравнить последовательность исходных бит (таблица 6) и результат демодуляции по алгоритму ПЦППР, то можно убедиться, что последовательности совпадают.
Численное моделирование
Для описанного алгоритма ПЦППР для ФМ-4 было проведено численное моделирование с целью определения вероятности ошибки от соотношения сигнал/шум [6]. Распределение шума соответствовало нормальному значению (аддитивный белый гауссовый шум). Для сравнения было проведено моделирование на тех же самых данных для демодулятора на основе эквалайзера, подавляющего эффект памяти канала [7].
На рисунке 5 показаны результаты измерений.
Как можно видеть из представленного графика, алгоритм ПЦППР обладает более высокой помехозащищенностью, чем эквалайзер.
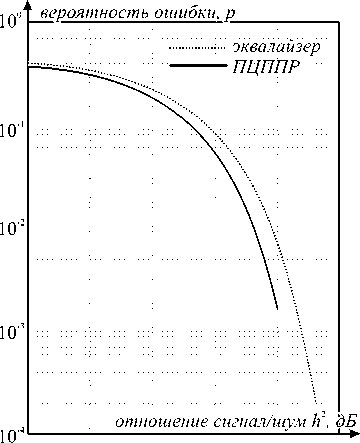
Рисунок 5. Зависимость вероятности ошибки от отношения сигнал/шум при ФМ-4
Заключение
В работе представлено описание алгоритма ПЦППР для двух видов фазовой модуляции։ двухпозиционной и четырехпозиционной. В приведенных примерах были рассмотрены особенности обработки для данного алгоритма.
Теоретические графики, полученные в ходе численного моделирования, показывают, что алгоритм ПЦППР обеспечивает более высококачественную демодуляцию сигнала, чем эквалайзеры. Одной из причин является то, что эквалайзер приводит к увеличению мощности шума, так как в ходе коррекции импульсной характеристики происходит подавление «памяти», но некоррелированные отсчеты шума уменьшают эквивалентное отношение сигнал/шум, что повышает вероятность ошибки. А алгоритм ПЦППР, в отличие от эквалайзера не создает такой эффект. Данный результат не противоречит существующим исследованиям [8]. Дальнейшие работы будут посвящены исследованию алгоритма ПЦППР для демодуляции в системах с МІМО (Multiple Input Multiple Output) с целью дополнения уже имеющихся исследований в этой области [9‒11].
Список литературы Алгоритм приема в целом с поэлементным принятием решения при использовании метода фазовой модуляции
- Прокис Дж. Цифровая связь / под ред. Д.Д. Кловского; пер. с англ. М.: Радио и связь, 2000. 800 с.
- Способ демодуляции дискретных сигналов и устройство для его применения: Патент 2102836. Российская Федерация. № 4898997/09 / Д.Д. Кловский (RU); В.Г. Карташевский (RU); С.А. Белоус (RU); заявл. 01.08.1991; опубл. 20.01.1998.
- Карташевский В.Г. Рекуррентная модификация алгоритма приема «в целом» с поэлементным принятием решения // Радиотехника. 2016. № 6. С. 149-153.
- Двухпозиционная фазовая модуляция (BPSK). URL: https://digteh.ru/UGFSvSPS/modul/BPSK/(дата обращения: 15.03.2024).
- Четырехпозиционная фазовая модуляция(QPSK). URL: https://digteh.ru/UGFSvSPS/modul/QPSK/ (дата обращения: 15.03.2024).
