Алгоритм расчета углов между опорными точками для распознавания поз

Автор: Назина С.Л.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Математика, информатика и инженерия
Статья в выпуске: 1 (103), 2024 года.
Бесплатный доступ
Статья описывает алгоритм расчета углов между опорными точками для распознавания поз на видеопотоке с камеры. Описывается процесс расстановки ключевых ориентиров на изображении, их расположение и расчет углов между ними. Реализовано распознавание четырех поз с использованием данной методики.
Распознавание движений, ориентиры позы, расчет углов на плоскости
Короткий адрес: https://sciup.org/140304101
IDR: 140304101 | УДК: 004.02
Algorithm for calculating angles between reference points for position recognition
The article describes an algorithm for calculating angles between reference points for recognizing poses on a video stream from a camera. The process of placing key landmarks on the image, their location and calculation of angles between them is described. The recognition of four poses using this technique is implemented.
Текст научной статьи Алгоритм расчета углов между опорными точками для распознавания поз
Распознавание движений - это процесс анализа и интерпретации движений, зафиксированных на изображениях или видео. Эта технология позволяет компьютерам определять и классифицировать различные движения, такие как жесты рук, походку, мимику лица и другие формы движений человека.
Распознавание движений имеет широкий спектр применений, включая следующие области:
-
1. Взаимодействие с устройствами: управление устройствами без использования рук, например, с помощью жестов или движений головы.
-
2. Медицинские приложения: мониторинг физического состояния пациентов, реабилитация и диагностика двигательных нарушений.
-
3. Системы безопасности: обнаружение подозрительных движений или поведения для обеспечения безопасности в общественных местах или в рамках видеонаблюдения.
-
4. Виртуальная и дополненная реальность: создание интерактивных сценариев или игр, в которых пользователь может взаимодействовать с виртуальным окружением с помощью своих движений [1].
После этого необходимо передать изображение в конвейер машинного обучения для определения позы с помощью функции mp.solutions.pose.Pose().process(). Но так как конвейер ожидает входные изображения в RGB цветном формате, то сначала нужно преобразовать образец изображения из BGR в RGB формат с помощью функции cv2.cvtColor(), поскольку OpenCV считывает изображения в BGR формате (вместо RGB).
После выполнения определения позы на выход поступает список из тридцати трех ориентиров, представляющих места расположения суставов тела видного человека на изображении. Каждый ориентир обладает следующими параметрами: x: расположение по координате x, по ширине изображения; y: расположение по координате y, по высоте изображения; z расположение по z-координате, нормализованный примерно к тому же масштабу, что и x, он представляет глубину ориентира, в качестве исходной точки используется средняя точка бедер, чем меньше z, тем ближе ориентир к камере; visibility: значение, представляющее видимость ориентира [2-3].
После получения списка ориентиров их необходимо отобразить на изображении с помощью функции mp.solutions.drawing_utils.draw_landmarks() и отобразить результирующее изображение с помощью matplotlib библиотеки.
Для того, чтобы классифицировать позы по полученным ориентирам необходимо рассчитать угол между тремя определенными ориентирами. Так, чтобы рассчитать угол сгиба левой руки в локте необходимо найти угол между левым запястьем, левым локтем и левым плечом. По сути, для этого происходит расчет угла между двумя векторами, где первая опорная точка считается начальной точкой первого вектора, вторая - конечной точкой первого вектора, а также начальной точкой второго вектора, а третья - конечной точкой второго вектора.
При реализации окно видеосигнала с вебкамеры обновляется каждые десять секунд для ввода нового символа (позы пароля). Распознавание позы «Обе руки наверху» представлено на рисунке 1.
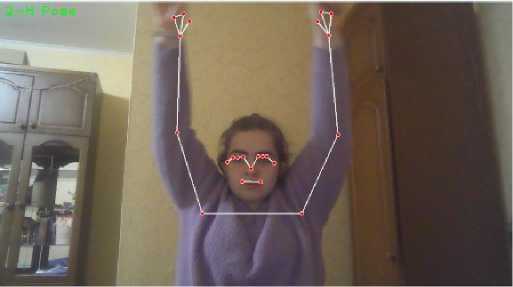
Рисунок 1 – Распознавание позы «Обе руки наверху»
Распознавание позы «Правая рука наверху» представлено на рисунке 2.

Рисунок 2 – Распознавание позы «Правая рука наверху»
Распознавание позы «Левая рука наверху» представлено на рисунке 3.
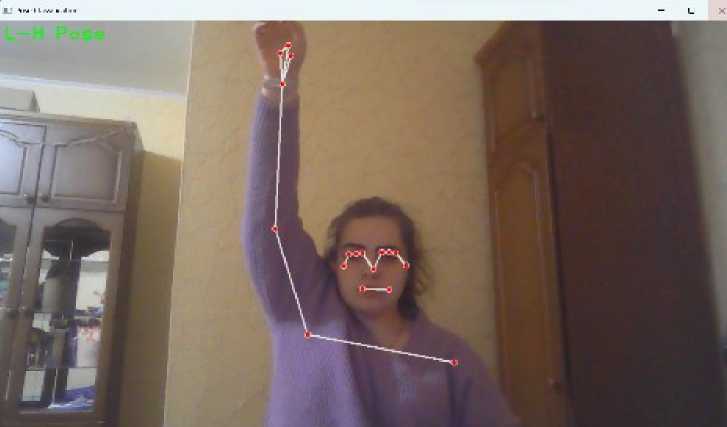
Рисунок 3 – Распознавание позы «Левая рука наверху»
Распознавание позы «Т-поза» представлено на рисунке 4.
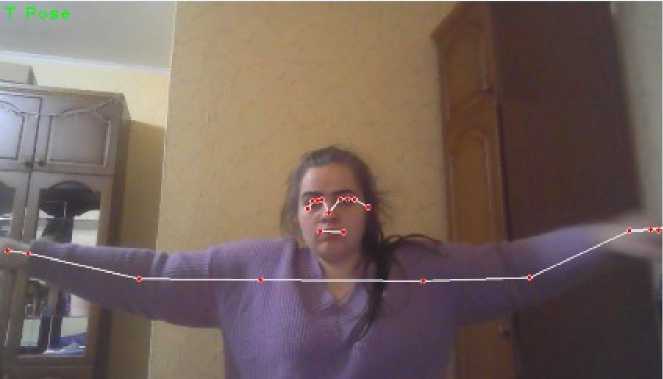
Рисунок 4 – Распознавание позы «T-поза»
Таким образом, распознавание движений играет важную роль в современных технологиях, обеспечивая более естественное и удобное взаимодействие человека с компьютерами и различными устройствами, а также находя применение в медицине, безопасности и развлекательной индустрии.
Список литературы Алгоритм расчета углов между опорными точками для распознавания поз
- Колегаев, Б.Я. Методика построения человеко-машинного интерфейса для управления компьютером на основе библиотеки mediapipe / Б.Я. Колегаев // Молодой исследователь Дона. - 2023. - № 1(40) - С. 5-10. EDN: DEZUDK
- Залуская, Е.Е. Определение положения тела человека: сравнение mediapipe и openpos / Е.Е. Залуская, А.А. Тур // Наукосфера. - 2023. - № 8-2 - С. 53-57. EDN: XDLZXC
- Ткаченко, С.В. Система компьютерного зрения в мобильных устройствах / С.В. Ткаченко, Т.В. Смирнова // Журнал Белорусского государственного университета. - 2022. - № 4 - С. 4-14.
