Алгоритм распознавания космических объектов на основе нейронных нечетких сетей с использованием интеграции информации от различных средств наблюдения

Бесплатный доступ
Рассмотрена задача повышения оперативности распознавания космических объектов. Предложен алгоритм решения задачи с помощью интеграции информации от различных средств наблюдения и нейронных нечетких сетей.
Интеграция информации, нечеткие нейронные сети, распознавание космических объектов
Короткий адрес: https://sciup.org/148309581
IDR: 148309581 | УДК: 004.658:629.7.058 | DOI: 10.25586/RNU.V9187.20.04.P.003
Algorithm for recognizing space objects based on neural fuzzy networks using integration of information from various tools
Keywords: information integration, fuzzy neural networks, Space object recognition
Текст научной статьи Алгоритм распознавания космических объектов на основе нейронных нечетких сетей с использованием интеграции информации от различных средств наблюдения
Необходимость контроля и мониторинга околоземного космического пространства (ОКП) обусловлена важными военными [8] и народно-хозяйственными целями [9]. Одной из важнейших задач систем мониторинга ОКП является задача распознавания космических объектов, включающая в себя подзадачи классификации космических объектов (КО) по типу (пилотируемый космический аппарат, ракета-носитель, элементы запуска или функционирования КО, фрагмент разрушения и т.д.) и его идентификации (государственной принадлежности, целевого назначения, степени опасности, функционального состояния и т.д.) [10]. Своевременное обнаружение искусственных спутников земли, представляющих опасность для своей страны, определение национальной принадлежности таких КО, их функционального состояния и других характеристик, повысят безопасность космических полетов, а также обеспечат сохранность благополучной экологической и политической обстановки [11].
Существующие методики распознавания не в полной мере могут обеспечить достаточную оперативность классификации и идентификации космических объектов с надлежащей точностью [12]. Предлагаемая методика основана на применении комбинированных искусственных нейронных сетей и интеграции информации о космических объектах из различных источников [13].
4 в ыпуск 4/2020
Распознаванием и сопровождением информации о космических объектах занимается система контроля космического пространства (СККП), включающая в себя оптико-электронные, радиолокационные и лазерно-оптические средства распознавания, ряд гражданских организаций, таких как Пущинская радиоастрономическая обсерватория Астрокосмического центра ФИАН им. Лебедева, Институт прикладной математики имени Келдыша РАН и др. [4]. При этом возникает проблема разнородности и неполноты информации о КО, которая связана с необходимостью обработки большого объема зачастую повторяющейся и противоречивой информации о космических объектах из различных источников [14].
Решением этой задачи может стать применение нечетких нейронных сетей с применением технологии интеграции данных из различных источников [15]. Обучив нейронную сеть соотносить разнородную информацию, такую как параметры блеска КО, лазерно-оптические и радиолокационные параметры, дополняя, таким образом, недостающие параметры, можно увеличить количественные и качественные показатели информации [16]. При увеличении объема информации может иметь место ее дублирование, в связи с этим при росте количественных показателей могут падать качественные. Для повышения качества необходимо исключить дублирование данных [17].
Использование нечетких множеств необходимо для описания неоднозначно понимаемых событий, объектов и понятий. Для оценки и классификации объектов, описываемых нечеткими множествами, используется понятие меры неопределенности. Свойства, которым должен удовлетворять такой показатель, называемый показателем размытости (или мерой энтропии) нечетких множеств, и в качестве этого показателя был предложен функционал, аналогичный шенноновской энтропии в теории информации [5]. В настоящее время рассматриваются различные альтернативные подходы к определению показателя размытости нечеткого множества, обсуждаются его свойства и возможные приложения.
Модель распознавания КО на основе нечетких нейронных сетей
В общем случае космические объекты в различные моменты времени с определенной долей вероятности находятся в той или иной точке в пространстве. Если задавать характеристики и стратегии движения КО в виде интервалов возможных значений, результатом будет множество параметров движения и маневров. Следует учитывать и тот факт, что от длительного пребывания в космическом пространстве меняются механические, оптические и другие свойства материалов космических аппаратов, что с течением времени может повлиять на точность распознавания КО.
В связи с этим предлагается использовать математический аппарат нечетких искусственных нейронных сетей. Преимущества использования нейросетей заключаются в следующем [1].
-
1. Свойство ассоциативности, позволяющее обрабатывать множество КО и оперировать образами ситуаций моделирования, а не их отдельными описаниями.
-
2. Способность к обучению, которая дает возможность получать устойчивые решения по результатам имитационного моделирования прикладных задач в реальном масштабе времени.
Зимовец А.И. Алгоритм распознавания космических объектов... 5
Для решения поставленной задачи предлагается модульная модель нейронной сети, представленная на рисунке 1, где:
-
• модуль 1 представляет собой совокупность средств распознавания различной направленности (оптико-электронные, радиолокационные, лазерно-оптические средства);
-
• модуль 2 отвечает за предварительную обработку признаков распознавания, в котором производится интеграция данных, перевод признаков распознавания в единый формат, избавление от избыточности и нормализация признаков для дальнейшего анализа;
-
• модуль 3 отвечает за анализ различных признаков распознавания;
-
• модуль 4 отвечает за формирование характеристик по итогам работы предыдущего модуля и вывод отчета о распознавании.
Модуль предварительной обработки признаков распознавания
Интеграция информации из всех истокнивсв распознавания

представление их к формату, необходимому для анализа

перевод признака» к единому
Объединение однотипных признеки (избавление от избыточности)

Модуль анализа признаков распознавания
Диагностика по признаку * Высота орбиты»
Диагностика по признаку «Форма КО»
Диагностика по признаку * Координатные признаки»

Модуль формирования
Формирование вектора вторичных характеристик по резу а, тагах* работы предыдущего модуля
Вывод общего вектора характеристик
Рис. 1. Модель искусственной нейронной сети для распознавания КО
На рисунке 2 представлен многослойный перцептрон, состоящий из входного слоя, трех скрытых слоев и выходного слоя.
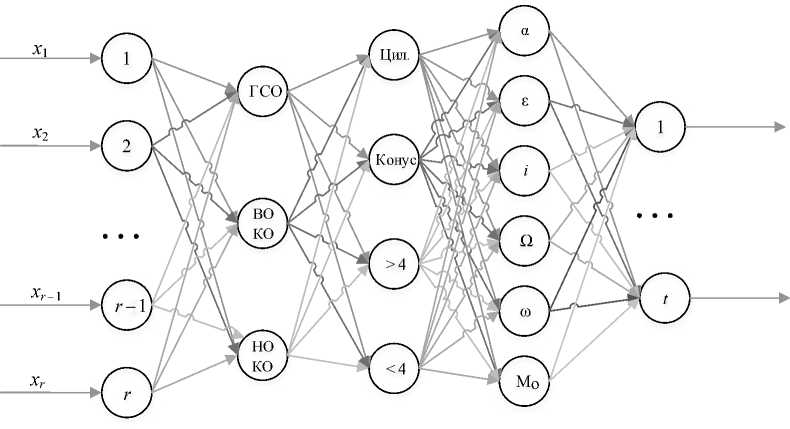
Рис. 2. Многослойный перцептрон для распознавания КО
6 в ыпуск 4/2020
Составные нечеткие высказывания объединяются в правила с помощью нечеткой логической операции конъюнкции (И) или дизъюнкции (ИЛИ). Входные характеристики имеют терм-множество {«высокий», «средний», «низкий»}. В таблице 1 приводится база правил для алгоритмов нечеткого вывода Мамдани, Ларсена и Такаги – Сугено [10].
Таблица 1
База правил для алгоритмов нечеткого вывода Мамдани, Ларсена и Такаги – Сугено
|
№ правила |
Общие условия всех алгоритмов |
Заключения для алгоритмов |
|
|
Мамдани и Ларсена |
Такаги – Сугено |
||
|
1 |
ЕСЛИ z есть X 1 И q есть A 1 |
ТО y есть F 1 (низкая) |
y = a 1 z + b 1 q |
|
2 |
ЕСЛИ z есть X 1 И q есть A 2 |
ТО y есть F 2 (средняя) |
y = a 2 z + b 2 q |
|
3 |
ЕСЛИ z есть X 2 И q есть A 1 |
ТО y есть F 2 (средняя) |
y = a 2 z + b 2 q |
|
4 |
ЕСЛИ z есть X 2 И q есть A 2 |
ТО y есть F 3 (высокая) |
y = a 3 z + b 3 q |
|
5 |
ЕСЛИ z есть X 3 |
ТО y есть F 3 (высокая) |
y = a 3 z + b 3 q |
Входная переменная X описывается тремя функциями принадлежности Xi , а A – двумя функциями принадлежности Ai , выходная переменная F описывается тремя функциями принадлежности Fi . В базе правил нельзя разместить больше вариантов правил, чем произведение числа функций принадлежности всех входных переменных. Их число равно 6 (2 × 3). Максимальное количество правил в базе определяется соотношением l = l 1 ∙ l 2 ∙ … ∙ lm , где li – коли чес тво функций принадлежности, используемых для задания входной переменной x i ( i = 1, m ) .
Сравнение алгоритмов
Предположим, что распознаваемый космический объект определяется четырьмя основными характеристиками x 1, x 2, x 3 и x 4 (долгота восходящего угла, наклонение, большая полуось и перицентр), представленными в виде лингвистических переменных. Тогда база правил будет состоять из двух правил с четырьмя входами и одним выходом. Для упрощения расчетов область определения нормируется каждой из характеристик в интервал [1, 10]. При определении классификации космического объекта ограничимся категориями «пилотируемый летательный аппарат», «спутник навигации», «спутник связи», «метеорологический спутник».
Алгоритм Мамдани предложен одним из первых и описывается следующим образом:
Правило 1: ЕСЛИ x 1 есть А 11 И x 2 есть А 12 И x 3 есть А 13 И x 4 есть А 14 ТО y есть B 1.
Правило 2: ЕСЛИ x 1 есть А 21 И x 2 есть А 22И x 3 есть А 23 И x 4 есть А 24 ТО y есть B 2.
Для нахождения степени истинности условий каждого из правил нечетких продукций используются парные нечеткие логические операции. Правила, степень истинности условий которых отлична от нуля, считаются активными.
Активизация подзаключений в нечетких правилах продукций выполняется с помощью min-активизации по формуле (1), причем для сокращения времени вывода учитываются только активные правила:
µ′( y ) = min{ ci , µ( y )}, (1) где C = { c 1, c 2, …, cq } – множество степеней истинности; q – общее количество подзаключений в базе правил.
Зимовец А.И. Алгоритм распознавания космических объектов...
На рисунке 3 представлен пример построения функции принадлежности.
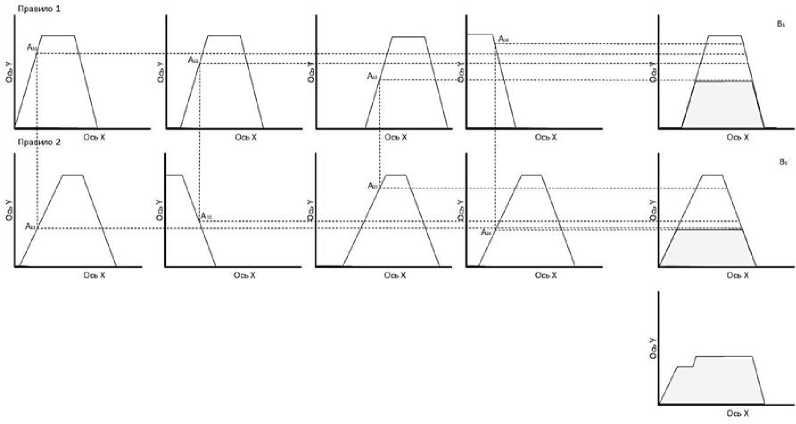
Рис. 3. Построение функции принадлежности
В базе правил для алгоритма Такаги – Сугено используются правила нечетких продукций в следующей форме:
Правило 1: ЕСЛИ x 1 есть А 11 И x 2 есть А 12И х 3 есть А 13 И х4 есть А 14
ТО y = c 11 x 1 + c 12 x 2 + с 13 х 3 + с 14 х 4 + с 10.
Правило 2: ЕСЛИ x 1 есть А 21 И x 2 есть А 22 И х 3 есть А 23 И х 4 есть А 24
ТО y = c 21 x 1 + c 22 x 2 + с 23 х 3 + с 24 х 4 + с 20.
Для нахождения степени истинности условий всех правил нечетких продукций, как правило, используется логическая операция min-конъюнкции:
α1 = min {µ A 11( x 1’), µ A 12( x 2’), µ А 13( х 3’), µ A 14( x 4’)},
α2 = min {µ A 21( x 1’), µ A 22( x 2’), µ A 23( x 3’), µ A 24( x 4’)}.
Для выполнения агрегирования могут использоваться и другие логические операции. Правила, степень истинности условий которых отлична от нуля, считаются активными и используются для дальнейших расчетов.
Активизация подзаключений в нечетких правилах продукций
Во-первых, с использованием min-активизации, как и в алгоритме Мамдани, находятся значения степеней истинности всех заключений правил нечетких продукций. Во-вторых, осуществляется расчет обычных (не нечетких) значений выходных переменных каждого правила. Это выполняется с использованием формул для заключения:
’’’ y1 11 1 12 2 13 3 14 410
’’’ y2 21 1 22 2 23 3 24 420
Здесь вместо x 1 и x 2 подставляются значения входных переменных до этапа фаз-зификации.
8 в ыпуск 4/2020
Аккумуляция заключений нечетких правил продукций фактически отсутствует, поскольку расчеты осуществляются с обычными действительными числами у j .
При дефаззификации выходных переменных используется модифицированный вариант в форме метода центра тяжести для одноточечных множеств:
y’ = (α1 y1’+ α2 y2’) / (α1 + α2), при этом не требуется проведение предварительного аккумулирования активизированных заключений отдельных правил.
Сравнительный анализ алгоритмов Мамдани – Ларсена и Такаги – Сугено представлен в таблице 2.
Таблица 2
Сравнительный анализ алгоритмов
|
№ |
z i |
qi |
Выходные значения нечеткой продукционной модели |
M |
|||
|
Мамдани |
Такаги – Сугено |
||||||
|
Y М |
Δ M |
Y T–C |
Δ T–C |
||||
|
1 |
0,22 |
4 |
0,216 |
29,3 |
0,076 |
54,5 |
0,167 |
|
2 |
0,71 |
1 |
0,71 |
14,8 |
0,631 |
24,2 |
0,833 |
|
3 |
0,34 |
2 |
0,457 |
8,6 |
0,205 |
59 |
0,5 |
Анализ показывает, что наименьшее отклонение от средних выходных значений показал алгоритм Мамдани (от 8,6 до 29,3%), наименьшую точность показал алгоритм Такаги – Сугено (отклонение от 24,2 до 59%). Также в качестве недостатка алгоритма Такаги – Сугено нужно отметить сложность формирования экспертами заключений по каждому правилу.
Заключение
В статье рассмотрены задачи, поставленные перед системой контроля космического пространства, представлены модель распознавания космических объектов и структура нечеткой нейронной сети, предложенной для решения поставленной задачи. Проведено сравнение алгоритмов нечеткого вывода, представлены базы правил и пример построения функции принадлежности.
Список литературы Алгоритм распознавания космических объектов на основе нейронных нечетких сетей с использованием интеграции информации от различных средств наблюдения
- Авраменко В.С., Маликов А.В. Диагностирование компьютерных инцидентов безопасности на основе комбинированной искусственной нейронной сети // Защита информации. Инсайд. 2019. № 6 (90). С. 72-76.
- Алдохина В.Н., Климов Д.В., Куприянов Н.А. Модель фотометрирования геостационарного спутника наземным оптическим средством // Труды Военно-космической академии имени А.Ф. Можайского. 2018. № 661. С. 92-103.
- Зимовец А.И., Хомоненко А.Д. Обоснование выбора модели хранения данных для системы мониторинга космического пространства // Автоматика на транспорте. 2019. Т. 5, № 2. С. 221-232.
- Исаев Е.А., Корнилов В.В. Проблема обработки и хранения больших объемов научных данных и подходы к ее решению // Математическая биология и биоинформатика. 2013. Т. 8, № 1. С. 49-65.
- Лоскутов А.И., Дуников А.С., Артюшкин А.Б., Нечай А.А. Математическая модель системы символьной синхронизации наземной приемно-регистрирующей станции телеметрической информации в условиях флуктуаций амплитуды сигнала // Вестник Российского нового университета. Серия "Сложные системы: модели, анализ и управление". 2017. Вып. 1. С. 11-19.
