Алгоритм распознавания технологического цикла драглайна

Автор: Трепалина Евгения Анатольевна
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Статья в выпуске: 8, 2012 года.
Бесплатный доступ
В данной статье рассматривается возможность создания алгоритма распознавания этапов выполнения технологического цикла экскаватора- драглайна для дальнейшего применения в составе программного обеспечения системы управления драглайна.
Автоматизированная система управления, имитационная модель, алгоритм распознавания, рабочий цикл драглайна
Короткий адрес: https://sciup.org/140215547
IDR: 140215547 | УДК: 622:658.001.56;622.68
Текст научной статьи Алгоритм распознавания технологического цикла драглайна
Развитие открытых горных работ характеризуется широким использованием драглайнов при выполнении вскрышных работ, реализующих наиболее эффективную бестранспортную технологию. В настоящее время около 40 % общего объема вскрышных работ на угольных разрезах страны выполняется этими машинами. Однако в настоящий момент экскаваторы – драглайны в своей модернизации исчерпали возможности прироста производительности путем увеличения емкости ковша и грузоподъемности. Дальнейшее повышение эффективности может быть достигнуто применением новых систем автоматизированного управления, что в свою очередь требует разработки новых алгоритмов управления, диагностики и мониторинга.
Работы по созданию эффективных систем автоматизированного управления мощными шагающими драглайнами и компонентов этих систем выполнялись коллективами МГГУ, ГУА, ИГД им. А.А. Скочинского, МЭСИ, МЭИ, ВНИИэлектропривод, НИИтяжмаш Уралмаш. В составе этих коллективов работали такие ученые, как М.С. Балаховский, К.Е. Винницкий, О.А. Залесов, Б.В. Ольховников, А.Е. Троп, Ю.Я. Вуль, , В.И. Ключев, В.М. Мамкин, А.В. Кошкарев, В.В. Березин, М.С. Ломакин, Л.Д. Певзнер, Л.И. Толпежников, А.М Ромашенков, А.И Троеглазов, В.Ф. Кузнецов, Г.Б. Петерс, А.Д. Яризов, и многие другие известные ученые.
В настоящее время технологии и подходы математической теории распознавания и классификации применяются для решения задач анализа, прогноза и диагностики в различных предметных областях, таких, как: область бизнеса и финансов, медицина и здравоохранение, сельское хозяйство, геология, химия, физика, биология. А также в области техники: диагностика состояний нефтепромыслового оборудования в отношении солеобразования; контроль состояния технических устройств (задача диагностики, связанная с контролем управления космическим кораблем «Шаттл») [1].
Вычислительным центром им. А.А. Дородницына РАН и ООО «РЕШЕНИЯ» была разработана программная система распознавания и интеллектуального анализа данных «РАСПОЗНАВАНИЕ», включающая в себя библиотеку программ, реализующих линейные, комбинаторно- логические, статистические, нейросетевые, гибридные и коллективные методы прогноза и классификации. Эта система позволит произвести оценку эффективности использования и выбор метода распознавания на основании экспериментальных данных мониторинга рабочих циклов экскаватора-драглайна и компьютерных моделей. Распознавание предполагается производить по следующим параметрам: ток и напряжение якоря главных приводов экскаватора, токи возбуждения генераторов, токи возбуждения двигателей, напряжения на выходе сельсинных командоаппаратов, их производные.
Тестирование разработанных методов будет производиться на модели работы тяжелого экскаватора - драглайна. За основу будет взята реализованная на кафедре «автоматики и управления в технических системах» Московского государственного горного университета совместно и под руководством Щелкова П.Ю., имитационная модель сетевой системы управления [2]. Модель содержит:
-
- имитатор органов управления и средств индикации;
-
- модель системы управления электрооборудованием мощного шагающего экскаватора-драглайна;
-
- модели электрооборудования экскаватора.
Обобщенная структура имитационной модели системы управления представлена на рис. 1.
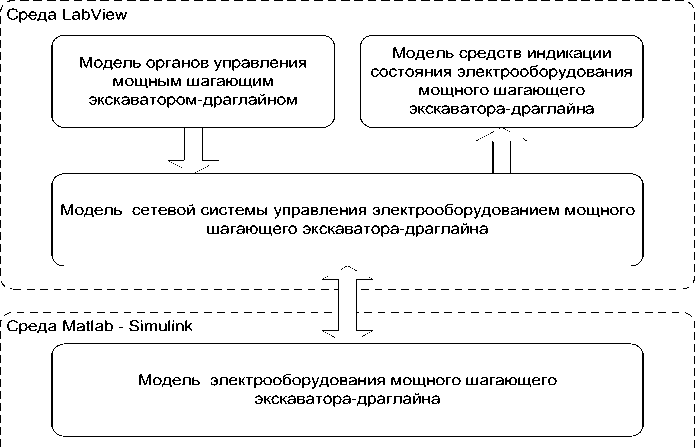
Рис. 1. Обобщенная структура имитационной модели системы управления электрооборудованием мощного шагающего экскаватора-драглайна.
Для реализации поставленной в данной работе задачи необходимо создание полноциклической модели движения главных механизмов и рабочего органа, что подразумевает наличие модели имитатора машиниста. При этом следует отметить, что имитатор машиниста должен задаваться варьируемыми параметрами, такими, как синхронность, скорость, равномерность, точность движений и т.д.
Модель имитатора машиниста будет реализована в среде LabVIEW, как и модель метода распознавания, содержащая модель метода машинного обучения и модель алгоритма распознавания.
Структура описываемой имитационной модели представлена на рис. 2
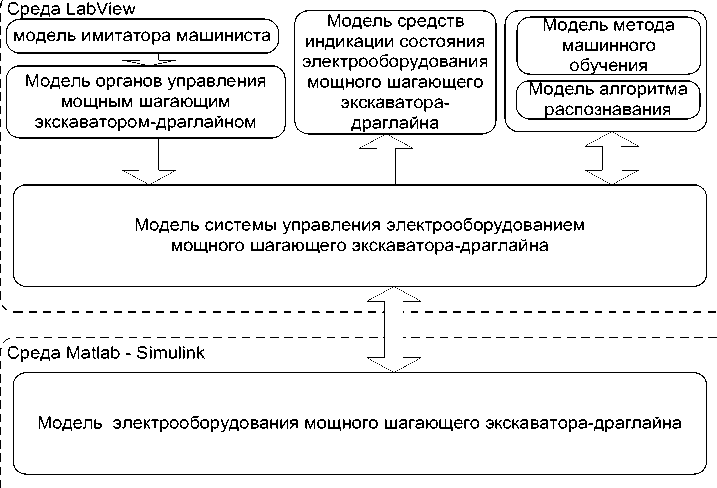
Рис.2. Обобщенная структура имитационной модели системы управления с применением алгоритма распознавания технологического цикла мощного шагающего экскаватора-драглайна.
Разработка алгоритма распознавания этапов выполнения технологического цикла экскаватора-драглайна и его техническая реализация в составе программного обеспечения системы управления позволит сократить время отработки технологического цикла, снизить динамические нагрузки на оборудование, тем самым снизить его износ.
Список литературы Алгоритм распознавания технологического цикла драглайна
- Журавлев Ю.И., Рязанов В.В., Сенько О.В. Распознавание. Математические методы. Программная система. Практические применения. -М: ФАЗИС, 2006.
- Щелков П.Ю. Имитационная модель сетевой системы управления электрооборудованием мощного шагающего экскаватора-драглайна.//Горный информационно-аналитический бюллетень. -№6, 2011. -с.530-542.
