Алгоритм распознавания типа беспилотных летательных аппаратов по траекторным признакам

Автор: Фалилеев Вячеслав Юрьевич, Шатовкин Роман Родионович
Рубрика: Математическое моделирование
Статья в выпуске: 3, 2020 года.
Бесплатный доступ
На основе положений теории систем со случайной скачкообразной структурой разработан алгоритм распознавания типа беспилотного летательного аппарата по траекторным признакам. Результаты моделирования функционирования разработанного алгоритма на примере реальных траекторий беспилотных летательных аппаратов самолетного и вертолетного типа подтверждают целесообразность практического использования предлагаемого алгоритма.
Беспилотный летательный аппарат, алгоритм распознавания типа беспилотного летательного аппарата
Короткий адрес: https://sciup.org/148309088
IDR: 148309088 | УДК: 621.396.965:004 | DOI: 10.25586/RNU.V9187.20.03.P.034
Type recognition algorithm unmanned aircraft by trajectory signs
Based on the provisions of the theory of systems with a random jump-like structure, an algorithm for recognizing the type of an unmanned aerial vehicle based on trajectory features has been developed. The results of modeling the functioning of the developed algorithm on the example of real trajectories of unmanned aerial vehicles of aircraft and helicopter types confirm the expediency of practical use of the proposed algorithm.
Текст научной статьи Алгоритм распознавания типа беспилотных летательных аппаратов по траекторным признакам
В настоящее время беспилотные летательные аппараты (БЛА) применяются вероятным противником для решения широкого круга тактических и оперативно-тактических задач в ходе ведения боевых действий. Это обусловливает необходимость создания и развития комплексов защиты, которые позволяют обнаруживать и распознавать тип БЛА. Если вопросы обнаружения БЛА освещены в литературе достаточно подробно [2; 3; 7], то решению задачи распознавания типа БЛА уделено недостаточно внимания. Существующие алгоритмы распознавания типа пилотируемых летательных аппаратов в этом случае оказываются непригодными вследствие существенной разницы в динамике и особенностях полета самолета и БЛА [5; 6], что обусловливает необходимость разработки алгоритма распознавания типа БЛА.
Цель исследования – разработка алгоритма распознавания типа БЛА по траекторным признакам.
Постановка и решение задачи
Алгоритм распознавания типа БЛА по траекторным признакам основан на том факте, что БЛА самолетного типа не способен зависать на продолжительное время, в отличие от БЛА вертолетного типа. Возможное кратковременное зависание БЛА самолетного типа обуслов-
Фалилеев В.Ю., Шатовкин Р.Р. Алгоритм распознавания типа беспилотных...
лено в большинстве случаев порывами ветра. Вместе с тем и БЛА самолетного типа, и БЛА вертолетного типа способны осуществлять маневренное и неманевренное движение. В этом случае задача распознавания типа БЛА по траекторным признакам приводит к необходимости иметь автоматическую систему, состоящую из трех подсистем с различной структурой, учитывающих маневренное движение, неманевренное движение и зависание БЛА.
При использовании положений теории систем со случайной скачкообразной структурой процесс смены структуры можно описать дискретной марковской последовательностью s k , состояния которой являются мгновенными значениями случайного процесса, имеющего конечное число возможных состояний ( sk = 1 – наличие маневра; sk = 2 – отсутствие маневра; sk = 3 – зависание БЛА), сменяющих друг друга в случайные моменты времени с некоторой вероятностью.
Оценка состояния структуры s ˆ k осуществляется на основе выражения [1; 4; 8]:
S k = arg max p (s k ), (1)
где
3 3
p ( s k + i ) = У У ^ ( s k + i I s k ) ( 2 n V ( s k + 1 , s k
_ S k + 1 = 1 S k = 1
{ 1 T - 1
"v( s k + 1 , s k ) V ( s k + 1 , s k ) v( s k + 1 , s k ) } P ( s k )
- 1
X
X3 - 1/2
Х У ^ ( S k + 1 I S k ) ( 2 n V ( S k + 1 , S k ) ) X
Sk = 1
x exp { - 1 v ( Sk + 1 , Sk ) T V ( Sk + 1 , Sk ) 1 v( Sk + 1 , Sk ) } P ( Sk ) ;
|
v( Sk + 1 , Sk ) z k + 1 H x ( Sk + 1 , Sk ) ; |
(3) |
|
V ( S k + 1 , S k ) = HP ( S k + 1 , S k ) H T + R . |
(4) |
|
x ( Sk + 1 , Sk ) = x ( Sk + 1 = Sk ) = ф ( Sk ) x ( Sk ); |
(5) |
|
P ( S k + 1 , S k ) ^P ( S k + 1 = S k ) = Ф ( S k ) P ( S k ) Ф ( S k ) T + Q ( S k ); |
(6) |
x ( Sk + 1 )— У ^ ( Sk + 1 | Sk )( 2 П V ( Sk + 1 , Sk
L S k 21
{ 1 T - 1
- 2 v( Sk + 1 , Sk ) V ( Sk + 1 , Sk ) v( Sk + 1 , Sk ) } P ( Sk )
- 1
X
х У н ( Sk + 1 | Sk ) ( 2 n V ( Sk + 1 , Sk
Sk = 1
х exp { - 1 v ( Sk + 1 , Sk ) T V ( Sk + 1 , Sk ) 1 v ( Sk + 1 , Sk ) } P ( Sk ) x ( Sk + 1 , Sk ) ; 2
36 в ыпуск 3/2020
-/ \ / W-1/2
P ( Sk + 1 )= ^ H( Sk + 1 | Sk ) ( 2 n V ( Sk + 1 , Sk ) ) X
[ S k = 1
- 1
X
x exp { - 2 v( Sk + 1 , Sk ) T V ( Sk + 1 , Sk ) 1 v( Sk + 1 , Sk ) } p ( Sk )
x f ц ( S k + 1 | S k ) ( 2 n V ( S k + 1 , S k )Г X
Sk = 1
X exp { - 1 v( Sk + 1 , Sk ) T V ( Sk + 1 , Sk ) 1 v( Sk + 1 , Sk ) } P ( Sk )X
X { P ( Sk + 1 , Sk )+[ 5 ( Sk + 1 , Sk )- 5 ( Sk + 1 ) ][ 5 ( Sk + 1 , Sk )- 5 ( Sk + 1 ) ] T } ;
P ( S k + 1 , S k ) = ( I - K ( S k + 1 , S k ) H ) P ( S k + 1 , S k ) ;
-5 ( Sk + 1 , Sk )=- 5 ( Sk + 1 = Sk ) =ф ( Sk ) 5 ( Sk ) ;
к ( S k + 1 , S k ) = P ( S k + 1 , S k ) h T V ( S k + 1 , S k )- 1.
В уравнениях (1)-(11): 5(Sk), 5(Sk+1,Sk) - частные оценки и апостериорные частные оценки вектора фазовых координат; 5(Sk), 5(Sk+1, Sk) - частные прогнозы и априорные частные оценки (прогнозы) вектора фазовых координат; P (Sk ), P(Sk+1, Sk ) - ковариационные матрицы частных оценок и апостериорных частныхоценок 5(Sk) и 5 (Sk+1, Sk) соответственно вектора фазовых координат; P(Sk ), P (Sk+1, Sk ) - ковариационные матрицы частных прогнозов и априорных частных оценок (прогнозов) 55 (Sk) и 55 (Sk+1, Sk) соответственно вектора фазовых координат; ф(Sk) - переходная матрица состояний; Zk - вектор наблюдений; v(Sk+1,Sk) - вектор невязки; V(Sk+1,Sk) - ковариационная матрица одношагового предсказания вектора наблюдений; K(Sk+1,Sk) - матрица коэффициентов усиления; Q(sk) – ковариационная матрица формирующего шума модели; H – матрица наблюдений; R – ковариационная матрица шума наблюдения; I – единичная матрица; ц(Sk+1 | Sk ) - условные переходные вероятности.
Значения условных переходных вероятностей ц ( sk +1 | sk по результатам анализа типовых траекторий полета.
1. Для БЛА самолетного типа:
) задаются с учетом типа БЛА
£ и ( S k + 1 = 1| S k ) = 0,24; ^ ц ( S k + 1
Sk = 1
Определим:
^ ( Sk + 1
s k = 1
=11 sk=1)=н( sk+1
= 2| S k ) = 0,75; £ ц ( S k + 1 = 3| S k ) = 0,01.
s k = 1
=11 sk = 2)=н( sk+1
= 1| S k = 3 ) = 0,08;
Фалилеев В.Ю., Шатовкин Р.Р. Алгоритм распознавания типа беспилотных... 37
н ( s k + i = 2| s k = 1 ) =Ц ( s k + i = 2| s k = 2) =ц ( s k + i = 2| s k = 3 ) = 0,25;
н ( s k + 1 = 31 s k = 1 ) = ^ s k + 1 = 3| s k = 2 ) = 0,005;
H(sk+i = 3| sk = 3)=0.
-
2. Для БЛА вертолетного типа:
£ н ( S k + 1 = 1 S k ) = 0,42; &( S k + 1 = 2| S k ) = 0,42; £ u ( S k + 1 = 3| S k ) = 0,16.
-
Sk = 1 Sk = 1 Sk = 1
Определим:
H( Sk + 1 = 1 s k = 1 ) = ^( s k + 1 = 1 Sk = 2 ) = ^( Sk + 1 = 1| s k = 3 ) = 0,14;
ц ( Sk + 1 = 21 Sk = 1 ) =^ ( Sk + 1 = 21 Sk = 2 ) =h ( Sk + 1 = 21 Sk = 3 ) = 0,14;
H ( Sk + 1 = 3| Sk = 1 ) = ^ ( Sk + 1 = 3| Sk = 3 ) = 0,05;
u( Sk+1 = 3| Sk = 2) = 0,06.
В качестве исходных значений для используемых в алгоритме параметров принимаются значения параметров для БЛА самолетного типа для состояний s 0 = 1 и s 0 = 2, и вертолетного типа для состояния s 0 = 3.
Изначально при работе алгоритма считается, что БЛА имеет самолетный тип. Затем в процессе функционирования алгоритма определяется тип БЛА, и используются соответствующие этому типу значения параметров. Если в процессе работы алгоритма на любом из тактов определен вертолетный тип БЛА, то параметры, характерные для него, используются на всех последующих тактах работы алгоритма. Причем факт зависания БЛА определяется в соответствии с полученной оценкой состояния структуры s k = 3, а для определения типа БЛА по траекторным признакам используется критерий распознавания « n из n ».
Для периода обновления информации о БЛА Т = 3 сек. целесообразно использовать критерий «3 из 3»: если при трех последовательных периодах обзора для отметки БЛА, находящегося на протяжении трех обзоров в одном и том же азимутальном секторе, на выходе разработанного алгоритма сопровождения присутствуют оценки состояния 5 k - 2 = 3 , ^ k । = 3 и s k = 3 , то принимается решение, что БЛА вертолетного типа. В противном случае принимается решение, что БЛА самолетного типа.
На рисунке 1 представлена логическая схема разработанного алгоритма распознавания типа БЛА.
Моделирование функционирования алгоритма распознавания типа БЛА осуществлялось на примере реальных траекторий полета БЛА самолетного типа «Мерлин-21Б» и БЛА вертолетного типа DJI Phantom 4.
Траектория БЛА самолетного типа «Мерлин-21Б» в пространственной прямоугольной системе координат представлена на рисунке 2.
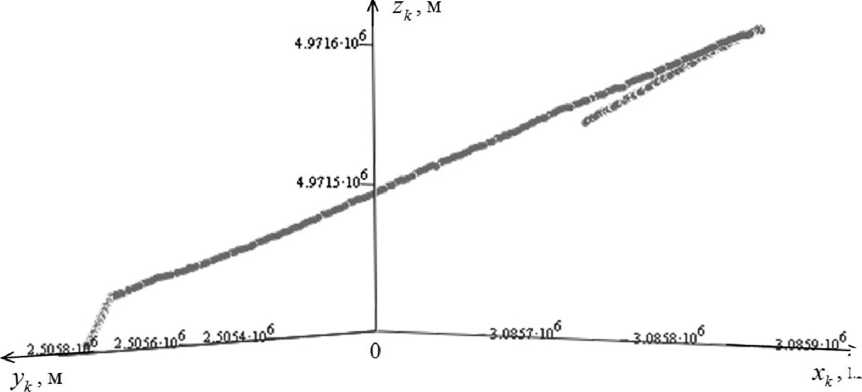
Траектория БЛА вертолетного типа DJI Phantom 4 в пространственной прямоугольной системе координат представлена на рисунке 3.
На рисунках 4–5 для БЛА самолетного типа и БЛА вертолетного типа соответственно представлены результаты функционирования алгоритма распознавания типа БЛА.
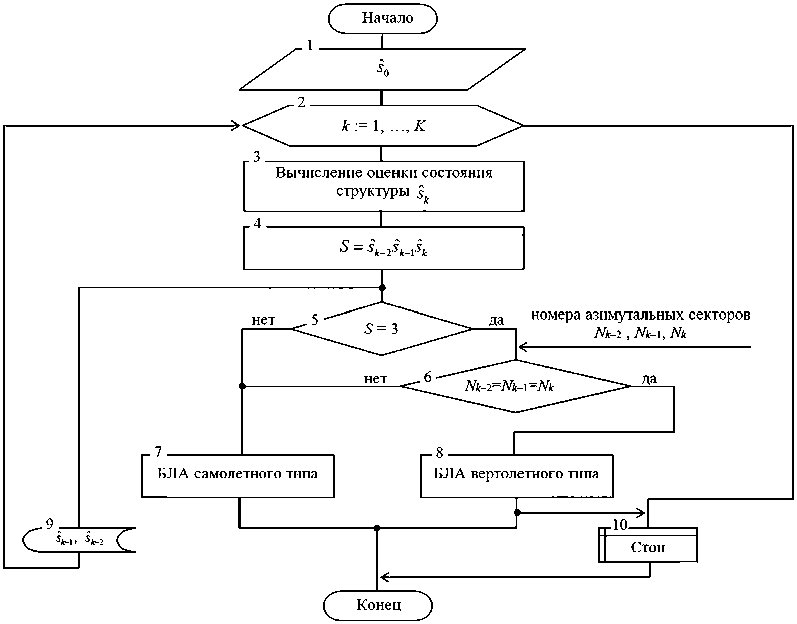
Рис. 1. Логическая схема алгоритма распознавания типа БЛА
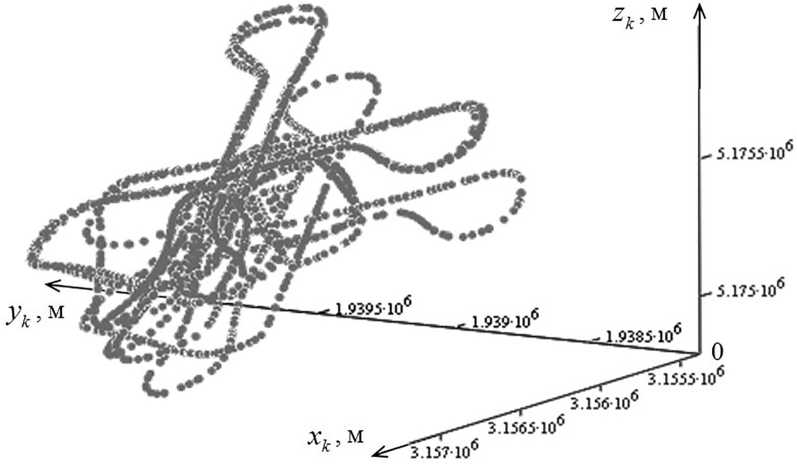
Рис. 2. Траектория БЛА самолетного типа «Мерлин-21Б» в пространственной прямоугольной системе координат
A s
Рис. 3. Траектория БЛА вертолетного типа DJI Phantom 4 в пространственной прямоугольной системе координат
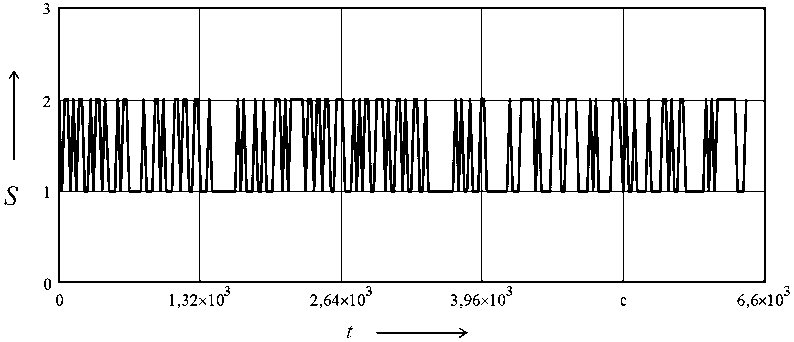
Рис. 4. Результаты функционирования алгоритма распознавания типа БЛА для БЛА самолетного типа
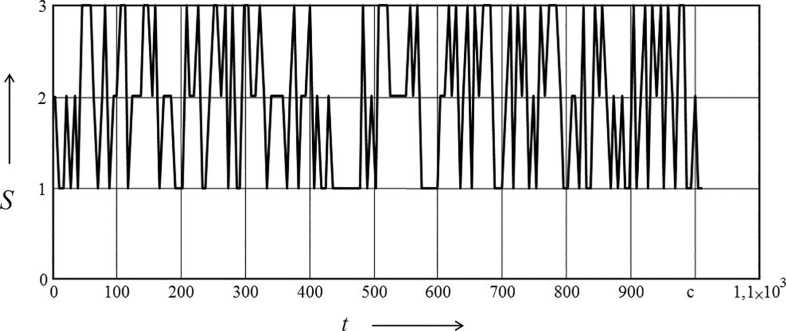
Рис. 5. Результаты функционирования алгоритма распознавания типа БЛА для БЛА вертолетного типа
40 в ыпуск 3/2020
Для случая БЛА самолетного типа за все время полета выдается признак БЛА самолетного типа ( S = 1 или S = 2), для случая БЛА вертолетного типа на 48 сек. полета выдается признак БЛА вертолетного типа ( S = 3). Полученные результаты подтверждают целесообразность практического использования предлагаемого алгоритма распознавания типа БЛА.
Список литературы Алгоритм распознавания типа беспилотных летательных аппаратов по траекторным признакам
- Бухалев В.А. Распознавание, оценивание и управление в системах со случайной скачкообразной структурой. М.: Наука. Физматлит, 1996. 288 с.
- Годунов А.И., Шишков С.В., Юрков Н.К. Комплекс обнаружения и борьбы с малогабаритными беспилотными летательными аппаратами // Надежность и качество сложных систем. 2014. № 2 (6). С. 62-70.
- Еремин Г.В., Гаврилов А.Д., Назарчук И.И. Малоразмерные беспилотники - новая проблема для ПВО. URL: http://armynews.ru/ 2015/02/ malorazmernye-bespilotniki-novaya-problema-dlya-pvo/ (дата обращения: 27.08.2019).
- Казаков И.Е., Артемьев В.М., Бухалев В.А. Анализ систем случайной структуры. М.: Наука. Физматлит, 1993. 272 с.
- Методы и техника радиолокационного распознавания. URL: https://studfiles.net/preview/5729341/page:3/ (дата обращения: 27.08.2019).
- Методы радиолокационного распознавания. URL: https://infopedia.su/13x96ff.html (дата обращения: 27.08.2019).
- Филин Е.Д., Киричек Р.В. Методы обнаружения малоразмерных беспилотных летательных аппаратов на основе анализа электромагнитного спектра. URL: https://russiandrone.ru/ publications/metody-obnaruzheniya-malorazmernykh-bespilotnykh-letatelnykh-apparatov-na-osnove-analiza-elektromagn/ (дата обращения: 27.08.2019).
- Шатовкин Р.Р. Моделирование функционирования системы управления вооружением истребителя в режиме радиолокационного молчания: монография. Воронеж: Изд-во ВАИУ, 2010. 328 с.
