Алгоритм решения многокритериальных задач управления

Автор: Лазарев Ю.Н., Гераськин М.И.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Управление и моделирование в сложных системах
Статья в выпуске: 1 т.3, 2001 года.
Бесплатный доступ
Рассматривается задача формирования управления сложной системой, исходя из минимизации векторного критерия качества, при наличии ограничений на параметры состояния и вектор управления. Предложен подход к решению задачи с использованием аппроксимации множества Парето, на основе которого разработан алгоритм формирования управления. Обоснованы условия сходимости алгоритма.
Короткий адрес: https://sciup.org/148197643
IDR: 148197643 | УДК: 519.8
Algorithm of solution of multi criterion control problems
The problem of forming of control by the complex system with vector quality criterion minimization and under constraints on the current parameters and control vector is considered. The method of solution of the problem with using Pareto area approximation is proposed. The algorithm of control forming on the base of the method is developed. The conditions of workability of the algorithm is proved.
Текст научной статьи Алгоритм решения многокритериальных задач управления
-
1 Самарский научный центр РАН
-
2 Самарский государственный аэрокосмический университет
Рассматривается задача формирования управления сложной системой, исходя из минимизации векторного критерия качества, при наличии ограничений на параметры состояния и вектор управления. Предложен подход к решению задачи с использованием аппроксимации множества Парето, на основе которого разработан алгоритм формирования управления. Обоснованы условия сходимости алгоритма.
Формулировка задачи
Рассматривается процесс функционирования управляемой системы при наличии ограничений на параметры состояния и вектор управления. Состояние системы в каждый момент времени определяется вектором управления и , принадлежащим допустимой области U :
и е U .
На параметры состояния управляемой системы наложены ограничения
Gj[u] < 0,j = 1,...,J.(2)
Целью функционирования системы является минимизация векторного критерия качества
Rk[u],k = 1,...,K.(3)
Таким образом, для управляемой системы требуется определить вектор управления в соответствии с ограничениями (1) и (2)
и eU = { u eU, G j [u] < 0,j = 1,...,J } , (4) минимизирующий векторный критерий (3).
Парето-оптимальные и минимаксно-оптимальные решения
В сформулированной задаче соотношения (2) и (3) задают отображение ^:U ^ Ф , где Ф - область допустимых значений критериев, образуемая допустимыми значениями векторов Rk[u](k = 1,...,K) при управлениях, удовлетворяющих условиям (4). В дальнейшем используется множество индексов K = { k = 1,2,...,K } .
Решение многокритериальной задачи приводит к формированию множества не-улучшаемых по Парето ( П -оптимальных) управлений u* [1], принадлежащих множеству U . Множество Парето представляет собой совокупность управлений, определяемых из условия
u * е U| 3u е U: Rk [u] < Rk [u * ], [k е K , u , u *
Управления, входящие в множество Парето, являются несравнимыми по векторному критерию, вследствие чего возникает проблема выбора единственного управления из множества Парето. Единственность решения задачи (1)-(4) может быть обеспечена с помощью принципа гарантированного результата (минимакса) [2], согласно которому оптимальным считается управление u о из множества U , которое доставляет наилучшее значение наихудшему критерию качества:
uo = arg min max Rk[u] . (6)
ueU keK "
Важным свойством управления, сфор мированного в соответствии с принципом минимакса, является наличие наибольшей окрестности, внутри которой управление может варьироваться при необходимости парирования априорно неопределенных факторов.
Нормализация критериев
Критерии Rk,k е K имеют разный смысл и разные диапазоны изменения. Нор- мализация критериев при управлении и выполняется по формуле:
5 k [u] =
R k [u] - R kmin
5 2 = a ( 5 . )- b (10)
с коэффициентами
max
R k
n min
R k
,k е K , (8)
b = In 5"2 - ln 5 2
in 5 1 - in 5 1
a = 5 2 ( 5 1 ) b .
где 5 k [u] - нормализованное значение k-го критерия; Rm” - минимальное значение k-го критерия, полученное в результате решения однокритериальной задачи оптимизации без учета остальных критериев, достигаемое при управлении umm ; R ^max - максимальное значение k-го критерия, определяемое как наибольшее среди значений, соответствующих управлениям, при которых остальные (K-1) критериев при тех же условиях достигают минимумов.
Для нормализованных критериев принцип минимакса определяется следующим образом [3]: задача (1)-(4) при равнозначных критериях решена, если найдено управление u0 eU , для которого
5 0 [u 0 ] = mi n max 5 k[u ] ueU keK '
Аппроксимация множества Парето
Приближенно управление, оптимальное по критерию (9), может быть получено с использованием аппроксимации поверхности ^(П), образованной сочетаниями критериев при п -оптимальных управлениях в K-мерном пространстве критериев. В соответствии со свойствами множества Парето [3] поверхность ^(П) строго монотонна и представляет собой левую нижнюю границу множества Ф. Поверхность ^(П) является выпуклой, если множество Ф выпукло. В этом случае поверхность ^(П ) может быть аппроксимирована гиперповерхностью.
В двухкритериальной задаче гиперболическая кривая (рис.), проходящая через точки аппроксимации
А' ( ^ 1 >^ 2 ) и А" ( ^ 1 ,^ 2 )
с
центром в начале координат и асимптотами - координатными осями (в результате нормализации критериев) определяется уравнением
В задаче с тремя критериями качества уравнение аппроксимирующей поверхности имеет вид
5 3 = a(5, У" (52 У ■ и коэффициенты a,b,,b2 вычисляются по формулам
-
b, = A^ / A, b, = Ab2 / A, a = 53 (5,)‘‘ (52)b2,
где
A = ( in 5 1 - in 5 2 )( in 5 2 - in 5 3 2 ) - | - ( in 5 1 - in 5 1 )( in 5 3 - in 5 2 ) , a b1 = ( in 5 2 - in 5 3 )(in 5 2 - in 5 2 ) - - ( in 5 3 - in 5 3 )( in 5 2 - bl 5 2 ) , a . = ( in 5 1 - in 5 2 )( in 5 3 - in 5 3 ) - - ( in5 1 - in5 3 )( in5 3 - in5 3 ) .
В общем случае К критериев уравнение аппроксимирующей гиперповерхности, проходящей через К точек аппроксимации Ak ( 5 k ,5 2 '---,5 K ) ,k е K , имеет вид
5 К = a ( 5 1 )- b1 ( 5 2 )- b2 ... ( 5 К - 1 )- bK - 1 (12) с коэффициентами a,b 1 ,b 2 ,...,b K - 1 , получае-
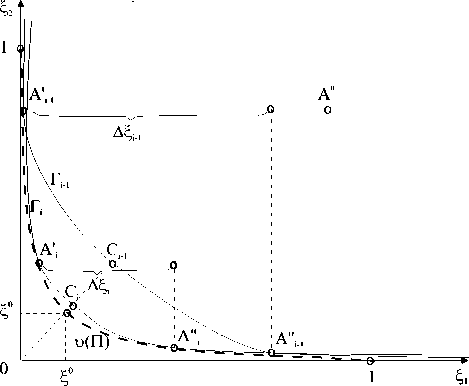
Рис. Формирование аппроксимирующих гипербол
мыми в результате решения системы уравнений
^ K = a$ f1 (^" b ... ( ^ K - 1 yb K - 1 ,k = 1,2,...,K .(13)
Методика использования аппроксимирующих гиперповерхностей
С учетом свойства, сформулированного в [4], нормализованные критерии при минимаксно-оптимальном управлении равны между собой. В двумерном случае точка, образованная сочетанием критериев при этом управлении, принадлежит биссектрисе первого квадранта. Вследствие этого координаты вершин аппроксимирующих гипербол (точки Ct, C i - 1 на рис.) соответствуют приближенным решениям двухкритериальной задачи.
Для формирования управления, являющегося приближенным решением многокритериальной задачи, необходимо
-
• определить K векторов управления, обеспечивающих сочетания критериев, при которых значения (K-1) критериев фиксированы, а один критерий достигает минимума, • определить коэффициенты аппроксимирующей поверхности путем решения системы (13),
-
• вычислить координаты вершины аппроксимирующей поверхности по формуле
У =S C
к г = ( a )
b 1 + b 2 + ... + b K - 1 + 1 .
Сочетание критериев в вершине аппроксимирующей поверхности и соответствующий вектор управления представляют собой приближенное решение многокритериальной задачи.
Уточнение приближенного решения может быть выполнено с помощью итерационной процедуры минимизации максимального для данного приближения критерия при фиксированных значениях других критериев. Управление, полученное в результате скалярной минимизации, позволяет сформировать соответствующую аппроксимирующую гиперповерхность, координаты вершины которой являются опорным управлением на следующей итерации.
Сходимость итерационной процедуры обеспечивается за счет выбора шага i-й ите рации A^i- (рис.) таким образом, чтобы выполнялось условие
А
■ Р A"
- min с,1 k e K
<A5 i <A5 i - 1 ,
за счет чего вершина аппроксимирующей гиперповерхности на каждой итерации оказывается между точками аппроксимации A " и Л " .
Шаг на i-й итерации предлагается вычислять по формуле
A^ i =
A ^ i- 1 + 5 C 1 - min ^ A1 keK
Алгоритм решения двухкритериальной задачи
В случае K=2 аппроксимирующая кривая является гиперболой. С учетом нормализации (8) центр гиперболы принадлежит началу координат, так как асимптотами являются координатные оси. Линия ^ (П) п-опти-мальных сочетаний критериев имеет вид, показанный на рис.
Предлагается следующий алгоритм формирования минимаксно-оптимального управления:
-
1) Решаются задачи скалярной минимизации критериев R k [ u ], k e K . Определяются управления u min и соответствующие им минимальные значения каждого критерия R min , k e к без учета остальных критериев.
-
2) Определяются максимальные значения каждого критерия
maxmin
Rk = max Rkun J,ke K -neK ,n^k*
-
3) Выбирается начальный закон управле-~
ния u e U среди uk ,k e K .
-
4) Задается начальное значение шага
A А < 1 .
-
5) Определяется опорное управление, тождественное начальному и = uH при i = 0 (i - номер итерации), или полученному на предыдущей итерации и = u iE; при i > 0 ;
-
6) Определяется критерий с наибольшим нормализованным значением
^к' = max %к[щ] кеК и фиксируется значение другого критерия R k = Rk [ui], к * к'; область U дополняется ограничением
U' = { и eU,Rk [и] = Rk ,к * к' } ;
-
7) Формируется управление ик , удовлетворяющее условию минимальности
^ к' [иг к‘ ] = min ^ к'[ и]к' е К, и eU'
и вычисляются координаты точки А( ^ 1гЛ 2г) , принадлежащей множеству J (П) ;
-
8) Определяется значение шага итерации A ^ i = A K ^ при i = 0 или
- A^i-1 + К Ci-1 - min^Ai
Ac =---------1---------'----- при i > 0. Вычисляется значение критерия с номером к', соответствующее этому приращению (8):
R k = ( K k U k - ] +A ? i )( R k- - R” n ) + R“ .
-^~
Область U дополняется ограничением;
U~' = {i e U~,R k [ u ] = R k } .
-
9) Формируется управление и к , удовлетворяющее условию минимальности
^к"[игк"] = min ^г1'"[и],к;''е К, и eU''
и вычисляются координаты точки 4(Kn^i) ;
-
10) Вычисляются координаты вершины гиперболы
^ 1 = ^ 2 = ( a ) b + 1,
-
11) Формируется управление u c , соответствующее точке C ( ^ C , ^ C ) или ближайшей к ней точке, если C i й Ф ; для этого по координатам точки Ci определяются значения исходных критериев
CC max min min
Rk =Ski(Rk - Rk ) + Rk ,к е K и находится управление и из условия принадлежности области
U C = { и eU, Rk [и] = Rk C ,k е к } , если C i еФ , или, если C i йФ , из условия min ~ max Rk [и] - R C ■ иeU к еК । ’
-
12) Проверяется условие окончания итераций |^ C - 1 - ^ C А £ . Если оно выполнено, то точка C i считается приближенным минимаксно-оптимальным сочетанием критериев, а ее прообраз ui C - минимаксно-оптимальным управлением и0 ; в противном случае вычисления повторяются, начиная с шага 5.
Алгоритм решения многокритериальной задачи в общем случае
В общем случае К критериев алгоритм имеет вид:
-
1) выбирается начальный закон управления u^ е U ; задается начальное значение
шага АК ^ < 1 ;
-
2) определяется опорное управление по правилу
{ ин при i = 0, C и{ - 1 при i > 0;
-
3) формируется К управляющих зависимостей и к ,к е К путем последовательного решения К задач минимизации
^к[игк] = min max^к[и],к = 1,...К, и£Uki кеК
Uh= [и eU,Rk [и] = Rg , к * argmax ^к[и'к_1],к е к! I к еК J в каждой из которых
Rk = ^k(Rmax -Rmin; + RminЛк = ^k-1 + A^i, где ^ к-1 - значение к-го критерия, полученное в результате предыдущей задачи. В каждой из К задач начальным приближением служит управление Ui при к=1, ик-1 при к=2,3,...,К; при этом шаг итерации равен
A K i =
A K i - i + K Ci-1 - min K A i к е к
-
4) вычисляются координаты точек A k (5^,5 21 ,-,5 k Ki),k g K, принадлежащих множеству ^(П) ;
-
5) вычисляются координаты вершины гиперповерхности C i = (5 % ,%^... ^кб )
^) И = 5 2i =---=5 Ki = ^ i = ( a ) b 1 + b2 +-+bK - 1 + 1 , где коэффициенты b 1 ,b2,...,bK _ 1 определяются из решения системы
5K = a'^ )"b' (5 I •••(?K-1) '" ,k = 1,2 K
-
6) формируется управление u C , соответствующее точке C i или ближайшей к ней точке, если C i ^ Ф ; для этого по координатам точки C i определяются значения исходных критериев
C cC /Dmax Dmin nmin
Rk = 5 ki(Rk - Rk ) + Rk ,k G K и находится управление u из условия принадлежности области
Uc = {u g U, Rk[u] = Rk ,k g k}, если Ci GФ, или, если Ci ^Ф, из условия ющие смежным итерациям, определяются уравнениями (рис.)
Г - 1 : 5 2 = f -1 ( 5 1 ) , Г : 5 2 = ft ( 5 1 ) .
Пусть приращение A5 i подбирается таким образом, что на каждой итерации точки A i и A i лежат на гиперболе по разные стороны от точки C i . В этом случае можно подобрать такое 5 g [ 0,1 ] , что
5 С =55 * + ( 1 -8 ) 5 k , 0 <5< 1, k = 1,2 .
Поскольку гипербола является выпуклой кривой, то из условия выпуклости
.f ( §5 k + ( 1 - 5 ) 5 k ) < 5f ( 5 k ) + ( 1 - 5 ). f ( 5 k ) - для любого 5 g [ 0,1 ]
вытекает, что
5 C = f ( 5 C ) = f ( 55 1 + ( 1 - 5 ) 5 1 ) < 5 f ( 5 1 ) + ( 1 - 5 ) f ( 5 1 ) =
= 55 2C - 1 + ( 1 -5 ) f {5 1’ ) (15)
’ ’
Так как по построению точки Ai верно неравенство f (51 ) = fi (5 C-1 )<5 C'-1 , (16)
min max Rk [u] - rC\ ■
'
u g U k g K
;
то при подстановке 5 C - 1 вместо f ( 5 i ) не
-
7) проверяется условие окончания ите-
- равенство (15) не изменит знака
раций 5 C_1 -5 C
< £ . Если оно выполнено,
то точка C i считается приближенным минимаксно-оптимальным сочетанием критериев, а ее прообраз uC - минимаксно-оптимальным управлением u 0 ; в противном случае вычисления повторяются, начиная с шага 2.
Условия сходимости алгоритма
Алгоритм позволяет определить минимаксно-оптимальное сочетание критериев 5 за конечное число итераций, то есть для заданной точности £ > 0 найдется такой номер i, что
|50 -5C\<£•(14)
5 C- = 5% Ci - 1 + ( 1 -5 ) 5 C - 1 5 C - 1 • (17)
С учетом того, что по свойству симметричности [5]
51C = 5 C = 5 C,(18)
из (17) следует невозрастание последовательности точек { 5 C }
5 C <5 C-1 •(
С другой стороны, по свойству симметричности (18) и свойству минимальности
5\[uk] = min 5\[u].k g k ugU сочетание критериев 5 ° при минимаксно оптимальном управлении u° ограничивает
Для случая К=2 гиперболы, соответству
последовательность точек
{5 C}
снизу:
-
£ ° = min ^ k, k = argmax ^ k .
u e U k e K
Таким образом, существует предел lim ^C = ^°, i ^~ а это означает, что начиная с некоторого номера i выполнится условие (14).
Заключение
Решение многокритериальной задачи на основе предложенного алгоритма сводится к последовательности скалярных оптимизационных задач и предусматривает:
-
а) формирование К Парето-оптималь-ных управлений;
-
б) построение в соответствии со значениями критериев при этих управлениях гиперболических поверхностей (кривые r i ,r i1 на рис.), аппроксимирующих поверхность Парето в пределах малой окрестности опорного управления;
-
в) нахождение точки сочетания критериев, принадлежащей аппроксимирующей поверхности и имеющей равные нормализованные значения критериев, и формирование соответствующего управления.
Предложенный алгоритм позволяет определять минимаксно-оптимальное сочетание критериев ^ 0 как в случае выпуклого к началу координат множества ^(П), так и в невыпуклом случае, поскольку на предпоследнем шаге в невыпуклом случае ищется точка, ближайшая к C в смысле u = argminmaxti[u] — £C .
u e U k eK ' '
Алгоритм, кроме того, позволяет учесть приоритеты критериев, задаваемые коэффициентами важности вk:
к
^вk = 1, вk > 0, k e К.
k = 1
В этом случае алгоритм применяется в неизменном виде, но нормализованные критерии подвергаются преобразованию:
5 k =в k £ k, k e К .
Таким образом, предложенный алгоритм, формируя минимизирующую последовательность управлений, сводит решение многокритериальной задачи управления к последовательности решения скалярных задач оптимизации, для которых разработаны надежные численные методы решения, в частности, [5].
