Алгоритм управления многозонным индукционным нагревом от источника с ограниченной мощностью

Автор: Зинин Юрий Михайлович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Теплоэнергетика
Статья в выпуске: 9 (49), 2005 года.
Бесплатный доступ
Приведены результаты разработки алгоритма управления статическим источником электронагрева с ограниченной выходной мощностью. Проведенный анализ позволил оптимизировать нагрев нескольких зон в установке индукционного нагрева для эпитаксиальной технологии.
Короткий адрес: https://sciup.org/147158001
IDR: 147158001 | УДК: 621.314;
Текст краткого сообщения Алгоритм управления многозонным индукционным нагревом от источника с ограниченной мощностью
Последнее выражение показывает, что для оптимального, по быстродействию, нагрева технологических зон необходимо, чтобы тепловая энергия выделялась поочередно в каждой из них. В этом случае задача синтеза оптимального регулятора приводится к определению очередности переключений и затем к определению моментов времени, когда эти переключения происходят.
Для этого введем новые координаты, определенные как т = Ly.
dy
Получаем ^- = Ry + KP, где R = Г1 BL, К = ЕХ. (9)
Далее используем свойство симметрических матриц. Представим матрицу L, чтобы матрица R системы (9) была диагональной. Следовательно, мы определим координаты, в которых исходная система описывается уравнением с диагональной матрицей, а траектории и управление в этих координатах определены линейными преобразованиями.
Синтез оптимального регулятора в рассматриваемой линейной системе, описываемой уравнением с симметрической матрицей, приводится к поиску оптимальных Р* управлений в системе с диагональной матрицей. В процессе решения мы используем афинное преобразование траектории т температур и управления Р.
Рассмотрим диагональную матрицу^.
— = Ат + Р, Т -^ min dt
r(0) = 0
т^)^ У^Осс,,
(Ю)
Для каждого из интервалов вектора управления полученную систему (9) представим в виде dT п ,
-^- = Атр+Р, Тр=т + ААр. , (11)
Решение последнего уравнения получаем в следующем виде т^т^*, (12)
где eAt - матричный экспоненциал;
Тр0 - начальное значение вектора температур.
Учитывая выражения (10) и (11), а также диагональную структуру матрицы А и граничные значения получаем краевую задачу многозонного нагрева в следующем виде гЛМ (1 - e-aN-v'N-i) e-“N-^ = ст?м
VN_2 (l-e-«.V-2^-2 V**^ = 0-^.2
Vcc где Vj =-----, t, - длительность соответствую щего интервала вектора управления.
Система (13) при фиксированной очередности переключений определяет полную длительность нагрева.
Мы определили задачу оптимизации как составление очередности в нумерации индексов с целью минимизации значения Т - периода управления.
Определим оптимальное управление в виде дискретной функции индексного аргумента
«JV-1
таХ--.........= max ((((... ((1--^-)^ -/v
УЛМ
“Х-4 gl
^-3 " V2 V1 '
Представим вектор Р в следующем виде:
P = QgU,
где U =[Ц] - нормированный вектор управления; g =[g„ ] - диагональная весовая матрица.
После указанных преобразований представим последнее равенство в следующем виде:
dT
— -Br + PgU. (16)
dt
Последнее выражение позволяет определить передаточную матрицу по управлению
W(p) = Р(рЕ-ВУ1 g = ^ (p)W2 (р), где Wy (р) = Р и W2(p) - передаточные функции звеньев разомкнутой системы регулирования.
Оптимальное управление определено в сле дующем виде:
Алгоритм управления многозонным регулятором заключается в том, чтобы переходной процесс системы от начальных значений до конечной температуры протекал за минимальное время.
Введем новые фазовые переменные у = [у; ], связанные со старыми переменными квадратной матрицей L: т - Ly .
Описание электротермического процесса в данной системе координат получаем из (16).
После преобразований это выражение будет иметь вид:
^ = Ry + PgxU, R = EXBL, gx=LAg dt
Изменением матрицы L можно отобразить исходный процесс в новую систему координат, где оптимальные траектории т^ отображаются в оптимальные траектории у(0, при этом начальные и конечные точки этих траекторий однозначно соответствуют друг другу.
При этом отображении рассматриваемого процесса в системах неизменными остаются временные параметры, так как преобразованию подлежат только пространственные координаты, а не временные характеристики процесса.
Временные координаты, характеризующие быстродействие системы и длительности настроенных интервалов времени управления на каждую из зон, равны.
В результате преобразований система уравнений оптимального управления многозонным нагревом принимает следующий вид:
dr ■ ■
— = Ат + PgU, Т -э min dt к , (17)
т(0) = 0, т^ст, £[/,<1
/=1
где A, g, U, Р - диагональная матрица, весовая диагональная матрица, нормированный вектор управления и ресурс (мощность) источника питания.
В системе уравнений (16) интервалы времени tj определяются условием перехода вектора управления U из начальных координат, для которых т(0) = 0 к концам фазовой траектории тф) = о . Этому условию удовлетворяет множество № нормированных векторов управления U. Оптимальным вектором, согласно теории расписаний, является вектор, который обеспечивает минимальное время Т^.
Нам необходимо установить оптимальную последовательность нумерации идентификационных индексов.
Задача упорядочения индексов в постановке теории расписания:
“/у-1®£Д
/(я*) = max ((.. .((((1 -^-) °" -^-)-
VN^-1
aN-3 aN-A gl
^N-l^ «N-г- ^-3} aN_3 __ -ЯХ) “2 _5_)“1 (18) vN-2 VN-3 v2
где л-* - оптимальная последовательность переключений, определяющая минимальное значение Т • min
Реализация управления системой нагрева определяется выявлением последовательности переключений зон нагрева л* с последующим вычислением периода вектора управления л . Затем система переходит в следующую позицию, соответствующую очередному переключению вектора управления.
Алгоритм, оптимальной по быстродействию, системы многозонного нагрева следующий.
-
1. Определение оптимальной последовательности вектора управления л* . Эта операция производится программным обеспечением супервизор-ной ЭВМ, входящей в состав системы управления.
-
2. Вычисление температуры нагреваемых зон в моменты переключений системы у, . Производится аппроксимацией градуировочной характеристики измерительной термопары.
-
3. При достижении любой зоной нагрева заданного значения температуры происходит переключение системы в следующую позицию.
Для реализации алгоритма необходимо, чтобы источник энергии, переключаемый на индукционные нагрузки, обладал меньшим запаздыванием, чем тепловая постоянная времени нагреваемых зон.
При управлении системой многозонного нагрева нами использована ЭВМ, что потребовало разработки интерфейса, обеспечивающего подключение локальных контуров частотного регулирования [6, 7].
Управление системой осуществляется по су-первизорному принципу, вектор управления многозонной системой индукционного нагрева интерпретируется адресом (номером) канала, на кото рый происходит переключение управления частотой, а значение этой частоты определяется в первом цикле подключенной нагрузки инструментальными средствами.
Приведенный алгоритм системы управления инверторно-индукционной установкой позволил эффективно использовать индукционный нагрев в прецизионной технологии эпитаксиального производства изделий микроэлектроники.
На рис. 2 показана установка, в которой реализуется нагрев герметизированной рабочей зоны с высокоточными испарителями кремнийсодержащего реагента от тиристорного преобразователя частоты (ТПЧ).
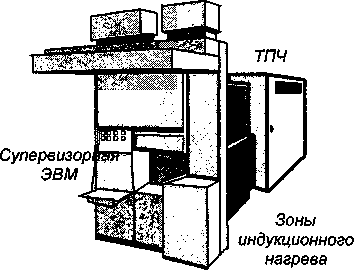
Рис. 2. Многозонная тиристорно-индукционная установка для эпитаксиального производства
Технологический процесс управляется микропроцессорной системой, обеспечивающей программируемое управление температурой, регулируемый расход технологических газов и управление временем технологических операций [7].
Установка предназначена для наращивания эпитаксиальных слоев кремния на пластинах диаметром 150, 100 и 76 мм. Она оснащена кварцевым реактором цилиндрического типа с индукционнорадиационным нагревом пластин (с системой пе-реотражения излучаемой энергии) и системой контроля герметизации реактора.
Диапазон рабочих температур 900... 1250 °C, неравномерность температурного поля в нагреваемой зоне не более 10 °C, скорость нагрева и охлаждения кремниевых пластин в рабочем диапазоне температур 20... 100 °С/мин.
Супервизорная ЭВМ обеспечивает стабилизацию и допусковый контроль параметров процесса с выводом информации на дисплей.
Процесс управления направлен на выравнивание средних относительных температур нагреваемых зон. Если от периода к периоду меняется номер «лидирующей» зоны, то отстающие получают энергию и соответствующее приращение температуры, пропорциональные степени отставания в предыдущем периоде. Таким образом, выявленный алгоритм оптимального управления в функции разности установленных и текущих значений температур нагреваемого объекта обеспечивает процесс регулирования многозонным индукционным нагревом.
Список литературы Алгоритм управления многозонным индукционным нагревом от источника с ограниченной мощностью
- A.c. № 1102057. Способ управления индукционной нагревательной установкой. Марон В.М., Иванов А.В., Зинин Ю.М., Ройзман П.С. Опубл. в БИ№25, 1984 г.
- Шапиро С.В., Зинин Ю.М., Иванов А.В. Системы управления с тиристорными преобразователями частоты для электротехнологии. -М.: Энергоатомиздат, 1989. -168 с.
- Синтез оптимального по быстродействию регулятора системы с ограниченными ресурсами/Ю.М. Зинин, В.М. Марон, П.С. Ройзман, В.А. Пацкевич//Межвуз. науч. сб. «Электронные системы управления и контроля летательных аппаратов». -Уфа, 1984. -Вып. 9.
- Зинин Ю.М. Информационно-вычислительный комплекс электротермической установки//Межвуз. науч. сб. «Измерительные преобразователи и информационные технологии». -Уфа: УГАТУ, 1998.-С. 195-202.
- Зинин Ю.М., Ройзман Ю.Л. Современные тиристорные преобразователи повышенной частоты «Петра». Аэрокосмическая техника и высокие технологии. Всероссийская научно-техническая конференция. -Пермь: ПГТУ, 2002.
- Зинин Ю.М. Автоматизированные инверторно-индукционные комплексы электротермической обработки//Межвуз. науч. сб. «Электромеханические комплексы и системы управления ими». -Уфа: УГАТУ, 1998. -С. 102-105.
- Зинин Ю.М. Синергия управления инверторно-индукционными системами электротермических установок повышенной частоты//Межвуз. науч. сб. «Управление в сложных системах». -Уфа.-1998.-С. 171-176.
