Алгоритм уточнения углов поворота и наклона камеры на летательный аппарат по записанному видео

Автор: Никифоров Д.Л., Ефимов С.Н.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4 т.25, 2024 года.
Бесплатный доступ
В связи с трудностями, возникающими при использовании систем спутниковой навигации на аэродромах в настоящее время, и недостаточной точностью инерциальных навигационных систем, для проведения траекторных измерений вновь стали использоваться оптические измерительные комплексы. Однако существующие измерительные комплексы обладают рядом недостатков. Целью данной работы является описание способа повышения точности траекторных измерений, полученных угломерным методом. В статье рассматриваются основные алгоритмы, применяющиеся при проведении траекторных измерений в настоящее время и их недостатки. Предлагается алгоритм покадровой послеполётной обработки записанного видео с камер оптико-электронного измерительного комплекса. Приводится описание реализации данного алгоритма с учётом особенностей графических программных интерфейсов для обработки ввода пользователя алгоритма. Предложенный алгоритм позволяет после проведения траекторных измерений, без ограничений по времени, уточнить углы поворота и наклона платформы в каждый момент времени. Предложенный алгоритм позволяет повысить точность как уже проведённых, так и проводимых в будущем траекторных измерений при испытаниях летательных аппаратов. Предложенный алгоритм также может использоваться для получения потенциальных углов поворота и наклона камеры при реализации угломерно-пеленгационного комплекса с применением неподвижных широкоугольных оптических камер. Например, при измерении диаграмм направленности бортовых антенн самолёта с помощью квадрокоптера-измерителя для определения его положения в пространстве в каждый момент времени. В статье также приводятся основные достоинства и недостатки алгоритма, вносятся предложения по его усовершенствованию, предлагаются возможные области его применения.
Траекторные измерения, пеленгационный метод, угломерный метод, оптические измерения, послеполётная обработка, определение координат летательного аппарата, спутниковые навигационные системы
Короткий адрес: https://sciup.org/148330571
IDR: 148330571 | УДК: 004.021 | DOI: 10.31772/2712-8970-2024-25-4-433-439
Algorithm for correcting camera pan and tilt on aircraft based on recorded video
Due to the difficulties that arise when using satellite navigation systems at airfields at present, and the insufficient accuracy of inertial navigation systems, optical measuring systems have again begun to be used to carry out trajectory measurements. However, existing measuring systems have a number of disadvantages. The purpose of this work is to describe a method for increasing the accuracy of trajectory measurements obtained by the goniometric method. The article reviews the main algorithms currently used in trajectory measurements and their shortcomings. An algorithm for frame-by-frame post-flight processing of recorded video from cameras of an optical-electronic measuring complex is proposed. A description of the implementation of this algorithm is given, taking into account the specifics of graphical software interfaces for processing user of the algorithm’s input. The proposed algorithm allows, after carrying out trajectory measurements, without time restrictions, to correct pan and tilt of the platform at each moment in time. The proposed algorithm makes it possible to increase the accuracy of trajectory measurements when testing aircraft, both already carried out and future ones. The proposed algorithm can also be used to obtain would-be pan and tilt of the camera when implementing a goniometric direction-finding complex using fixed wide-angle optical cameras. For example, when measuring the radiation patterns of an aircraft's onboard antennas using a quadcopter-meter to determine its position in space at each moment in time. The article also presents the main advantages and disadvantages of the algorithm, makes proposals for its improvement, and suggests possible areas of its application.
Текст научной статьи Алгоритм уточнения углов поворота и наклона камеры на летательный аппарат по записанному видео
Основным методом определения положения летательного аппарата в пространстве является использование систем спутниковой навигации [1]. В настоящее время их использование для проведения траекторных измерений на территории аэродромов по ряду причин невозможно [2]. Инерциальные навигационные системы, которые на данный момент используются вместо спутниковых, при длительных полётах накапливают значительную ошибку [3]. Помимо этого, для проведения такого рода измерений необходима установка дополнительного оборудования непосредственно на летательный аппарат, что не всегда возможно по юридическим или техническим соображениям, например, при использовании малогабаритных беспилотных летательных аппаратов с ограниченной полезной нагрузкой [4].
Одним из вариантов решения данной проблемы является использование оптических систем [5–7], таких как кинотеодолиты [8], для расчёта положения летательного аппарата по углам азимута и места с двух измерительных пунктов [9] (двухпунктный пеленгационный способ, представлен на рис. 1).
Цель
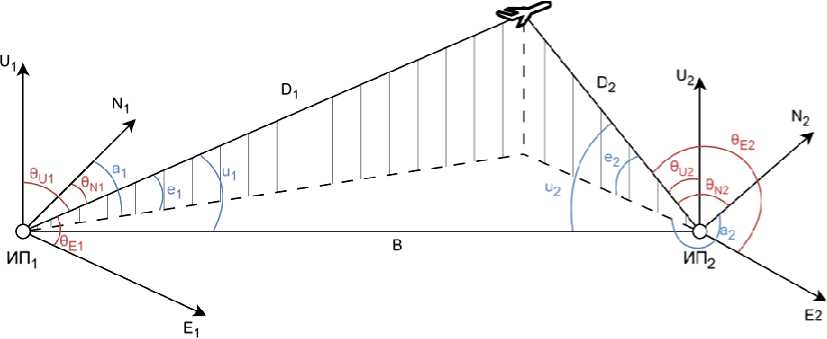
Рис. 1. Суть угломерного или пеленгационного способа определения координат
Fig. 1. Direction finding model
Однако практически не представляется возможным безошибочно следить за движением летательного аппарата. При ручном слежении за целью основное влияние на результат слежения оказывают ошибки оператора. Например, оператор не может идеально держать быстро движущийся объект в центре кадра из-за достаточно высокого времени реакции человека. Также оператор может допускать промахи из-за человеческого фактора.
Использование алгоритмов компьютерного зрения несколько упрощает задачу, но не решает проблему полностью. Яркостно-контрастные алгоритмы компьютерного зрения крайне чувствительны к погодным условиям и посторонним объектам в кадре [10]. Более продвинутые алгоритмы, основанные на машинном обучении, могут достаточно эффективно решать эту задачу, однако они требуют больших вычислительных мощностей и наличие большой обучающей выборки для каждой отдельной модели летательного аппарата, отслеживание которого планируется. Соответственно, разработка подобных алгоритмов для проведения небольших испытаний является экономически невыгодной.
Помимо этого, даже при наличии безошибочного алгоритма компьютерного зрения, принципиально невозможно решить проблему того, что поворотно-наклонный механизм имеет ограниченную скорость вращения. При этом не всегда имеется возможность использовать максимальную скорость вращения, даже если поворотно-наклонный механизм это позволяет. Камера, установленная на нём, может иметь значительный вес [11], что при резкой смене скорости может привести к выходу из строя поворотно-наклонного механизма.
Одним из решений может служить алгоритм покадровой послеполётной обработки, где оператор, не ограниченный временными рамками и физическими характеристиками измерительного комплекса, может с точностью до пикселя [12] указать положение летательного аппарата и уточнить углы поворота и наклона камеры относительно центра кадра [13].
Описание алгоритма
Суть послеполётной обработки заключается в следующем.
Оператор, проводящий послеполётную обработку, просматривает кадры записанного видео полёта. Оператор перемещается на кадр (рис. 2), соответствующий нужному моменту времени, наводит курсор на определённую точку летательного аппарата, по которой было решено проводить траекторные измерения, и нажатием кнопки мыши запускает работу алгоритма, который скорректирует углы визирования летательного аппарата.
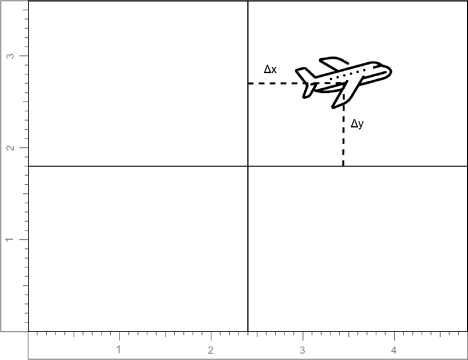
Рис. 2. Примерная схема кадра при послеполётной обработке
Fig. 2. Frame structure during post-flight processing
Поскольку при проведении послеполётной обработки разрешение монитора оператора, размер области отображения кадра и соотношение сторон, в отличие от исходного видео, могут меняться, необходимо учитывать этот факт и не привязываться к разрешению в пикселях, а работать относительно углов обзора по горизонтали и вертикали.
Программные интерфейсы, позволяющие получить текущее положение указателя мыши, возвращают его относительно левого верхнего угла области отображения [14]. Но поскольку углы визирования цели для каждого кадра задаются относительно его центра, необходимо выполнить преобразование координат указателя мыши. Положение указателя мыши относительно центра кадра может быть вычислено по следующей формуле:
w xcenter = xtopleft 2 ’ h ycenter 2 - ytopleft , где xtopleft и ytopleft – положение указателя мыши относительно верхнего левого угла кадра; w и h – общее количество пикселей в кадре по ширине и высоте соответственно.
Теперь необходимо перейти от линейного представления в пикселях к угловому в градусах или радианах. Для этого разделим кадр на квадранты. Оси, обозначающие ширину и высоту кадра, примем равными одному углу раствора по горизонтали и вертикали соответственно. Следовательно, точки по этим осям будут принимать координаты в промежутке от –0,5 до +0,5. Таким образом, мы избавляемся от необходимости знать разрешение исходного видео, чтобы посчитать цену пикселя в угловой мере. Коэффициенты линейного смещения цели относительно центра кадра могут быть вычислены по следующей формуле:
xcenter x topleft 1
wcoeff =------=T, w w2
y center 1 y topleft hcoeff h 2 h ’
Получить угловое смещение цели относительно центра кадра можно, умножив углы раствора объектива на соответствующие им полученные ранее коэффициенты:
aoffset = hFOV X wcoeff ’ eoffset = vFOV X hcoeff, где hFOV и vFOV – горизонтальный и вертикальный углы раствора объектива соответственно.
Теперь для получения уточнённых углов поворота и наклона камеры на летательный аппарат необходимо прибавить полученное угловое смещение к углам центра кадра.
at arg et = a center + aoffset ’ et arg et = ecenter + eoffset •
Заключение
Рассмотренный алгоритм может быть использован при проведении траекторных измерений для повышения точности [15] расчётов положения летательного аппарата. На рис. 3 представлен пример программы послеполётной обработки, использующей данный алгоритм. Помимо этого, данный алгоритм может использоваться в системах с неподвижными широкоугольными камерами как основной способ определения углов визирования на летательный аппарат. Такая система может быть применена для измерений диаграмм направленности бортовых антенн самолёта. Однако при использовании широкоугольных камер необходимо обязательно учитывать дисторсию объектива.
Основным недостатком данного алгоритма является необходимость вручную указывать положение летательного аппарата для каждого кадра, что делает его применение для длительных полётов трудозатратным. Одним из способов решения данной проблемы может быть выборка только ключевых кадров через определённый интервал времени (например, 2 раза в секунду) в зависимости от требований, указанных в техническом задании. В качестве альтернативы, для автоматизации процесса покадровой обработки, также могут быть использованы более ресурсоёмкие алгоритмы компьютерного зрения, которые не могут быть задействованы в режиме реального времени, но пригодны при отсутствии временных ограничений на обработку одного кадра, поскольку речь идёт о послеполётной обработке записанного видео.
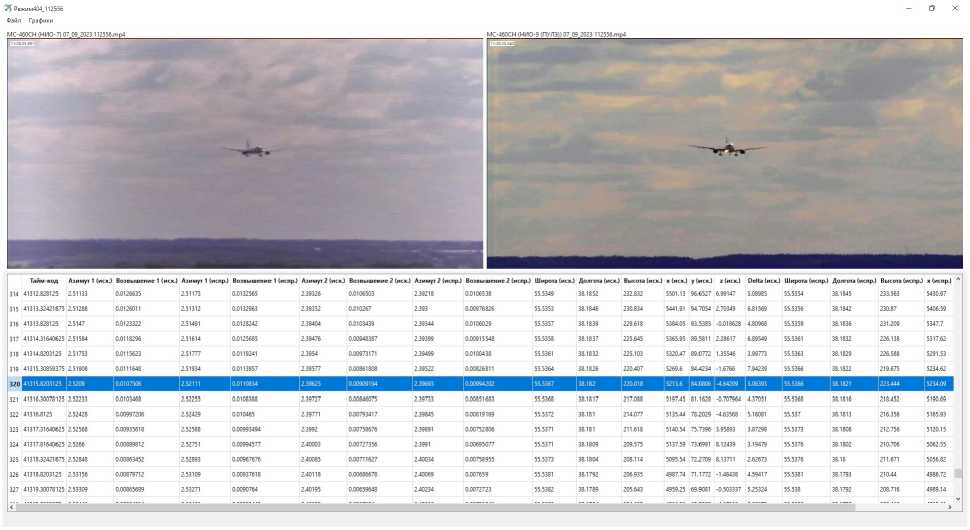
Рис. 3. Послеполётная обработка траекторных измерений МС-21
Fig. 3. Post-flight processing of Yakovlev MC-21
Основным достоинством данного алгоритма является возможность получения максимально возможной точности при проведении траекторных измерений кинотеодолитами, поскольку при покадровой обработке имеется возможность стабильно получать углы одной и той же точки летательного аппарата.
Список литературы Алгоритм уточнения углов поворота и наклона камеры на летательный аппарат по записанному видео
- Hein G. W. Status, perspectives and trends of satellite navigation // Satellite Navigation. 2020. Vol. 1, No. 1. P. 22.
- Гундоров К. В., Сулейманов В. Н., Медведков Д. А. Анализ работы спутниковой системы в условиях отключения Российской Федерации от навигационных систем недружественных стран // Вестник военного инновационного технополиса «ЭРА». 2023. Т. 4, № 2. С. 175–183.
- Типы ошибок в инерциальных навигационных системах и методы их аппроксимации / Литвин М. А., Малюгина А. А., Миллер А. Б. и др. // Информационные процессы. 2014. Т. 14, № 4. С. 326–339.
- Выбор типоразмерного ряда беспилотных летательных аппаратов и полезной нагрузки для мониторинга сельскохозяйственных полей / А. А. Артюшин, Р. К. Курбанов, Л. А. Марченко и др. // Электротехнологии и электрооборудование в АПК. 2019. № 4 (37). С. 36–43.
- Додонов А. Г., Путятин В. Г. Наземные оптические, оптико-электронные и лазерно-телевизионные средства траекторных измерений // Математические машины и системы, 2017. № 4. С. 30–56.
- Calculation of 3D Coordinates of a Point on the Basis of a Stereoscopic System / R. R. Mussabayev, M. N. Kalimoldayev, Ye. N. Amirgaliyev et al. // Open Engineering. De Gruyter Open Access, 2018. Vol. 8, No. 1. P. 109–117.
- Еналеев С. Ф. Траекторные измерения: практическое пособие. Москва, Вологда: Инфра- Инженерия, 2021. 124 с.
- Гусев М. В. История развития траекторных оптических средств измерений // Матрица научного познания. 2023. № 1-1. С. 57–65.
- Пат. RU 2 645 549 C2. Способ определения координат летательных аппаратов с использованием одного дирекционного угла и двух углов места / Д. В. Искоркин, С. В. Шишков, А. В. Терёшин и др. № 2015114888 ; заявл. 20.04.2015 ; опубл. 21.02.2018 Бюл. № 31, 10 с.
- Hager G. D., Belhumeur P. N. Real-time tracking of image regions with changes in geometryand illumination // Proceedings CVPR IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 1996. P. 403–410.
- Пат. RU 2 758 860 C1. Способ коррекции углов визирования на точку / К. Н. Рысенков, О. С. Войченко, И. С. Зобов и др. № 2020133299 ; заявл. 09.10.2020 ; опубл. 02.11.2021 Бюл. № 31, 19 с.
- Ko J.-H., Kim E.-S. Stereoscopic video surveillance system for detection of target’s 3D location coordinates and moving trajectories // Optics Communications. 2006. Vol. 266, No. 1. P. 67–79.
- A three-dimensional position measurement method using two pan-tilt cameras / H. Matsubara, T. Tsukada, H. Ito et al. // R&D Review of Toyota CRDL. 2003. Vol. 38, No. 2. P. 43–49.
- Synopsis – Qt for Python [Electronic resource]. URL: https://doc.qt.io/qtforpython-6/PySide6/QtGui/QSinglePointEvent.html#PySide6.QtGui.QSinglePointEvent.position (accessed: 07.05.2024).
- Пат. RU 2 533 348 C1. Оптический способ измерения размеров и положения объекта и дальномер-пеленгатор / Гузевич С. Н. – № 2013130715/28 ; заявл. 04.07.2013 ; опубл. 20.11.2014 Бюл. № 32, 15 с.
