Алгоритм вторичной обработки беззапросных измерений текущих навигационных параметров бортовым измерительным комплексом космического аппарата низкоорбитального сегмента системы глонасс в интересах повышения качества эфемеридно-временного обеспечения

Автор: И. О. Паршин, Д. А. Мосин, А. А. Толмачев, А. С. Головачев
Журнал: Космические аппараты и технологии.
Рубрика: Космические услуги
Статья в выпуске: 1, 2026 года.
Бесплатный доступ
Повышение точности и оперативности эфемеридно-временного обеспечения является ключевой задачей развития глобальных навигационных спутниковых систем, таких как системы ГЛОНАСС. Основу данного вида обеспечения составляют измерения текущих навигационных параметров навигационных космических аппаратов системы ГЛОНАСС, которые производятся сетью беззапросных измерительных станций. Для повышения качества эфемеридно-временного обеспечения требуется производить наблюдения навигационных космических аппаратов измерительными средствами на всей трассе полета, что в текущей конфигурации невозможно из-за территориальных и политических ограничений. Для решения данной проблемы возможно использовать низкоорбитальные космические комплексы в качестве динамичных беззапросных измерительных средств, что представляет собой перспективный путь решения этой проблемы, позволяя преодолеть ограничения наземной измерительной сети. В связи с этим целью данной статьи являлся алгоритм вторичной обработки беззапросных измерений текущих навигационных параметров совместно с дополнительными измерениями с целью получения компетентных измерений текущих навигационных параметров системы ГЛОНАСС для их использования в контуре эфемеридно-временного обеспечения системы ГЛОНАСС. В работе также предложен способ моделирования алгоритма, в основе которого лежит апостериорная высокоточная эфемеридная информация навигационных космических аппаратов системы ГЛОНАСС и космического аппарата космической геодезической системы «ГЕО-ИК-2», который был взят в качестве прототипа для низкоорбитального сегмента системы ГЛОНАСС.
Система ГЛОНАСС, низкоорбитальный комплекс системы ГЛОНАСС, беззапросные измерения, текущие навигационные параметры, эфемеридно-временное обеспечение
Короткий адрес: https://sciup.org/14135754
IDR: 14135754 | УДК: 629.783 | DOI: 10.26732/j.st.2026.1.05
An algorithm for secondary processing of unsolicited measurements of current navigation parameters by an on-board measuring system of a spacecraft of the low-orbit segment of the GLONASS system in the interests of improving the quality of ephemeris-time
Improving the accuracy and efficiency of ephemeris-time supportis a key task in the development of global navigation satellite systems, such as GLONASS systems. This type of software is based on measurements of the current navigation parameters of GLONASS navigation spacecraft, which are produced by a network of unsolicited measuring stations. To improve the quality of ephemeris-time support, it is required to monitor navigation spacecraft with measuring instruments along the entire flight path, which is impossible in the current configuration due to territorial and political restrictions. To solve this problem, it is possible to use low-orbit space complexes as dynamic, unsolicited measuring instruments, which is a promising way to solve this problem, allowing overcoming the limitations of the ground-based measuring network. In this regard, the purpose of this article was an algorithm for secondary processing of unsolicited measurements of current navigation parameters together with additional measurements in order to obtain competent measurements of the current navigation parameters of the GLONASS system for their use in the ephemeris-temporal support loop of the GLONASS system. The paper also proposes a method for modeling an algorithm based on a posteriori high-precision ephemeris information from GLONASS navigation spacecraft and the GEO-IK‑2 space geodetic system spacecraft, which was taken as a prototype for the low-orbit segment of the GLONASS system.
Текст статьи Алгоритм вторичной обработки беззапросных измерений текущих навигационных параметров бортовым измерительным комплексом космического аппарата низкоорбитального сегмента системы глонасс в интересах повышения качества эфемеридно-временного обеспечения
Современные требования к точности и надежности эфемеридно-временного обеспечения (ЭВО) глобальных навигационных спутниковых систем (ГНСС), в том числе и к отечественной системе ГЛОНАСС, непрерывно возрастают, что обуславливается требованиями потребителей к решению фундаментальных и прикладных задач. Ключевым фактором повышения качества ЭВО является оперативное и точное определение параметров движения и частотно-временных поправок к бортовой шкале времени (БШВ) навигационных космических аппаратов (НКА).
Традиционно для решения данной задачи используется территориально-распределенная сеть беззапросных измерительных средств (БИС) [1]. В текущей конфигурации эфемеридного контура системы ГЛОНАСС для повышения точности ЭВО используется сеть отечественных БИС, разверну- тых в рамках штатного наземного комплекса управления (НКУ), а также международные измерительные сети, структурно принадлежащие другим государствам. Однако в условиях агрессивной политики западных стран существует высокая вероятность исключения Российской Федерации из потребителей информации, рассчитываемой международными БИС. При снижении кратности и количества измерений текущих навигационных параметров НКА системы ГЛОНАСС по результатам работы БИС произойдет снижение точности ЭВО системы ГЛОНАСС, что скажется на точностных характеристиках навигационных определений потребителей.
Перспективным направлением для преодоления этого ограничения для системы ГЛОНАСС является использование проектируемого низкоорбитального космического комплекса (НКК) в качестве сегмента системы ГЛОНАСС, на который будут возложены следующие задачи [2]:
– создание навигационного поля в L-диапазоне частот;
– высокоточная коррекция потребителей путем передачи специальных поправок;
-
– мониторинг состояния системы ГЛОНАСС и зарубежных ГНСС;
– контроль целостности навигационного поля, создаваемого системой ГЛОНАСС.
Однако выполнение некоторых из указанных задач сопряжено с беззапросными измерениями текущих навигационных параметров (ИТНП) НКА системы ГЛОНАСС, что открывает возможность их использования для повышения качества ЭВО за счет сбора информации со «слепых» зон сети БИС и оперативно передавать их в наземный комплекс управления (НКУ) за счет периода обращения КА НКК. Применение КА НКК в качестве динамичных БИС требует особенной бортовой обработки ИТНП в силу случайных и системати-
Том 10
ческих погрешностей измерений, которые перед передачей в НКУ должны быть скомпенсированы. Поэтому потенциал НКК зависит от бортового измерительного комплекса (БИК) космического аппарата (КА), входящего в его состав [3].
БИК должен обеспечивать ИТНП, которые, в свою очередь, после сглаживания и предварительной обработки будут передаваться в НКУ системой ГЛОНАСС для последующей обработки специальными алгоритмами. Прием и передача в НКУ дополнительной информации (измерений по сигналам межспутниковой радиолинии (МРЛ) системы ГЛОНАСС) также приведет к повышению качества ЭВО системы в целом и, следовательно, к точности определения местоположения потребителем системы.
Вопросы использования низкоорбитальных КА для решения задач эфемеридно-временного обеспечения системы ГЛОНАСС в настоящий момент активно исследуются, но основной проблемой остается компенсация погрешностей при проведении измерений текущих навигационных параметров НКА, вызванных нестабильностью движения динамичного БИС. Поэтому на первый план при реализации такого способа ЭВО системы ГЛОНАСС выходят алгоритмы обработки ИТНП НКА в БИК КА НКК, в части компенсации характерных для низкоорбитальных КА возмущений, критически важных для формирования точных и достоверных измерений.
1. Постановка задачи разработки алгоритма вторичной обработки
Пусть БИК низкоорбитального КА в беззапро-сном режиме формирует вектор ИТНП в дискретные моменты времени t k:
'
ZИТНП (tk )= R (tk ), Ф (tk ), R ( tk ) , (1)
где R ( tk ) – вектор псевдодальностей до НКА системы ГЛОНАСС, измеренных по задержке дальномерного кода; Ф ( t k ) - вектор псевдодальностей до НКА системы ГЛОНАСС, измеренных по изменению фазы огибающей; R ( t k ) - вектор радиальной псевдоскорости.
Данный массив характеризуется:
– наличием случайных составляющих погрешности измерений;
– на лич ием систематических погрешностей, обусловленных прохождение м навигационного сигна ла через сквозной навигационный тракт;
– отсутствием прогности чес кой составляющей.
Для по вышения компетентности измерений Z ИТНП( t k) БИК должен проводить дополнительные измерения Z ДОП( t k), состав которых может варьи-
Алгоритм вторичной обработки беззапросных измерений текущих навигационных параметров…
роваться и должен быть обоснован с учетом требований к низкоорбитальному КА и БИК.
На основе полученных измерений требуется разработать такой алгоритм A , который будет формировать с требуемой точностью и полнотой вектор выходных параметров Y ( t k), включающий в себя сглаженные и отфильтрованные ИТНП, а именно псевдодальности до НКА.
В качестве априорной информации для реализации указанного алгоритма потребуются:
– модели движения НКА и низкоорбитального КА;
– модель ошибок БИК;
– конфигурационные параметры БИК.
Исходя из указанных входных и выходных данных, а также ограничений, структурная схема алгоритма вторичной обработки ИТНП в БИК низкоорбитального КА будет иметь вид, представленный на рисунке 1.
2. Структура алгоритма вторичной обработки текущих навигационных параметров бортовым измерительным комплексом
Для подтверждения работоспособности и оценки эффективности алгоритма (рисунок 1) потребуется провести его математическое моделирование. Для этого в качестве прототипа низкоорбитального КА с учетом предложений, указанных в [2], будет

рассмотрен КА геодезического класса «ГЕО ИК-2». Для вспомогательных измерений, повышающих компетентность ИТНП, будут взяты измерения межспутниковой радиолинии (МРЛ) D ( tk ) между НКА системы ГЛОНАСС, а также измерения высоты H изм.( t k) над поверхностью земного геоида, проводимые радиовысотомером в составе БИК. Ключевая задача привлечения такого типа измерений – повышение точности определения местоположения КА НКК в зонах недосягаемости средств управления данным комплексом.
Для верификации предложенного способа ЭВО системы ГЛОНАСС за счет применения низкоорбитальных КА требуется провести его математическое моделирование. Для этого был разработан алгоритм, структура которого пр едст авлена ниже.
На рисунке 2 представлена инициализация алгоритма. В качестве модели движения НКА системы ГЛОНАСС и низкоорбитального КА была взята апостериорная высокоточная эфемеридная информация (ЭИ), рассчитанная средствами НКУ, на одинаковых интервалах времени наблюдения t Фл :: б ; ] .
Дискретность высокоточной ЭИ для низкоорбитального КА выше, чем для НКА системы ГЛОНАСС (10 с – у низкоорбитального КА и 15 мин – у НКА), поэтому для создания модели движения требуется экстраполировать эфемериды НКА на моменты времени ЭИ низкоорбитального КА. Для этого применяется метод, описанный в [5; 6], который заключается в решении дифференциальных уравнений движения НКА численн ыми методами, н апример методом Рунге-Кутта 4 порядка [7–9].
Проверка корректности и полноты поступающих входных векторов ИТНП Zlrn]n(tk) и дополнительных измерений ZJon (tk)

Сглаживание и фильтрация
dx 0
- Vx-;
dyL = V ;
dt y 0
Рисунок 1. Структурная схема алгоритма вторичной обработки беззапросных ИТНП совместно с вспомогательными
= V ;
dt d£ = - G • X - 3 J 2 G • x P2 (1 - 5 z0)+L 0 c + J. 0 л;
dt2
dVy 3
^- - -G • y0 — 2 J 2 G • y0P ( 1 - 5 Z 0 ) + Jу 0 c + Jу 0 л ;
dVz ˆ3 0ˆ22
dt - G- z 0 2J2G •z 0 P (3 5 z 0) + jz 0 c + jz 0 л ;
где
G =
I q HKA ( t
irw; y0 =
y
II qH“ ( t
;
измерениями в БИК
z 0 =
z
Й----------
I q H" ( t
R
; p = нА
j z 0 c – ускоре-
If I— 0СМ1ЛМЕ АППАРАТЫ VI
Том 10
ТЕХНОЛОГИИ ^MS
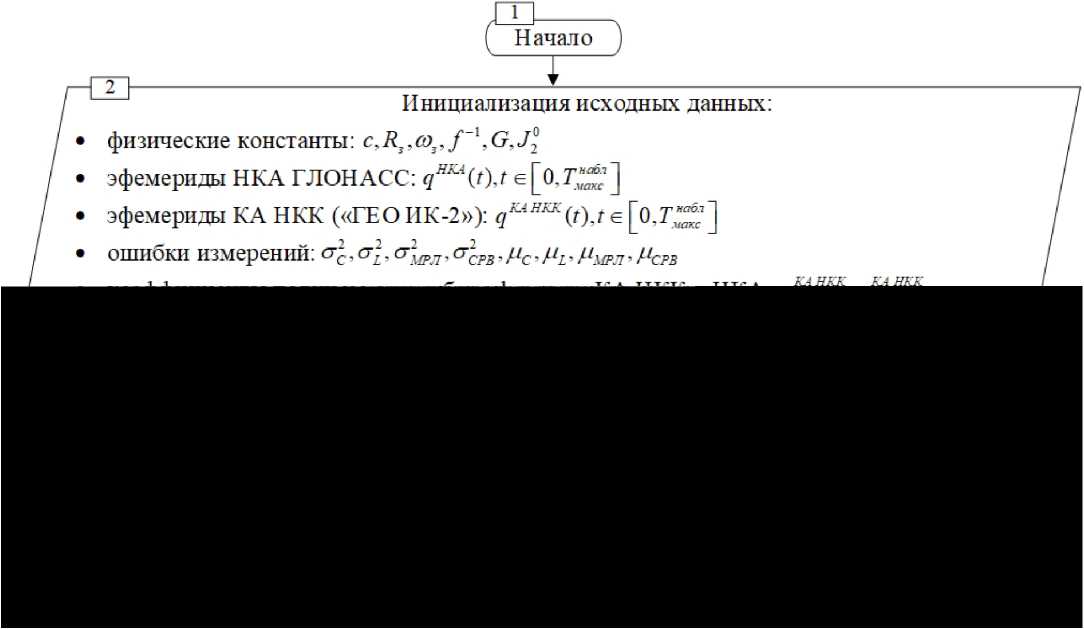
Рисунок 2. Фрагмент структурной схемы алгоритма втор ич ной обработки беззапросных ИТНП совместно с вспомогательными измерениями в БИК, иллюстри рую щий процеду р у инициализации
ния от солнечных гравитационных возмущений; j x 0 л , j y 0 л , j z 0 л – ускорения от лунных гравитационных возмущений; J 2 0 – зональный гармонический коэффициент второй степени, характеризующий полярное сжатие Земли.
После того как сформирована равномерная ЭИ на интервале наблюдения, происходит переход к основному циклу «Обработка ТНП НКА с помощью БИК» (рисунок 3).
Для моделирования приема н авигац ионных сигналов в БИК требуе тся опред ели ть соз вездие радиовидимых НКА с низкоорбитального КА J , а также сформировать множество наблю даемых созвездий по М РЛ для ка ждого ра диови димого НКА.
Основной частью алгоритма является формирование и обработка ИТНП и допо лнитель ных измерений (рисунок 4).
Для полноценного использования измерительной информации, полученной радиовысотомером из состава БИК низкоорбитального КА, в обработке должны использоваться только те измерения высоты, которые можно считать высокоточными и по известному объекту. Такими объектами могут выступить реперные точки на поверхности Земли, координаты которых известны с высокой точностью. Для этого требуется знать траекторию движения низкоорбитального КА на поверхности Земли λ КА НКК, φ КА НКК в каждый момент времени, на которой определена ЭИ.
Для моделирования уточнения ЭИ низкоорбитального КА в режиме автономного функционирования использовались измерения высоты относительно реперной точки при условии совпадения геодезических координат подспутниковой точки и реперного объекта. В случае несовпадения ко- ординат ЭИ низкоорбитального КА должна ухудшаться пропорционально времени прохождения между реперными точками.
Ве кто р ИТНП и измерений межспутниковой радиолинии ф орм ируется че р ез определение геом етри ческой да л ьности в евклидовом пространстве с учетом ошибок измерений, которые были п риня ты как с л учайные нормальные величины. Для расширения вектора ИТНП использовались изм ерени я псевдодальности по дальномерному коду и фазе несущего колебания.
На рисунке 5 представлен завершающий фрагме нт осн овного цикла формирования и обработки измерений.
Для определения местоположения НКА и КА НКК использовался псевдодальномерный мето д реше ния навигационной задачи, описанный в [4], для решения которого применялся метод наименьших квадратов:
Q = Q + ( H ' H ) ’‘ h ' AY , (3) где AY N x1 = [ R i , Ф , D , J - вектор невязок псевдодальностей и измерений межспутниковой радиолинии; H N × 4 – матрица частных производных по измеряемым параметрам.
Матрица H N × 4 определяется выражением:
|
'dR^ d R1( Q ) d R 1 ( Q ) ’ |
||
|
dx dy dz |
||
|
H =dRQ = N x 4 a q |
~ ~ ~ dRR2Q RQ dRQ 1 a x a y a z |
, (4) |
|
... dRRNQ a R n ( Q ) a R n ( Q ) 1 |
||
|
L a x a y a z J |
Алгоритм вторичной обработки беззапросных измерений текущих навигационных параметров… где R - измеряемый параметр; Q = [x y z St] - век- Данный показатель должен быть определен тор измеряемых параметров. по оценке точности рассчитанной эфемеридно
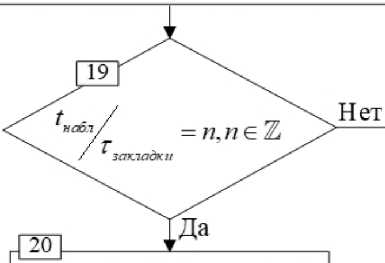
Важно определить такой параметр, как временной информации в НКУ относительно время закладки τ закладки массива ИТНП в НКУ. той информации, которая была рассчитана без
Рисунок 3. Фрагмент структурной схемы алгоритма вторичной обработки беззапросных ИТНП совместно с вспомогательными измерениями в БИК, иллюстрирующий начало основного цикла
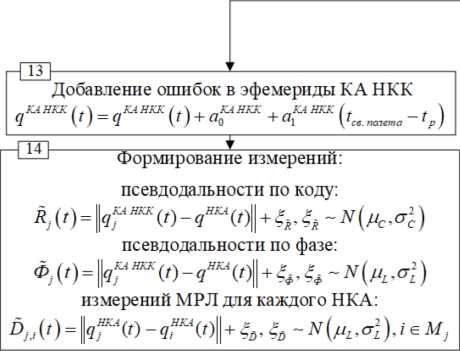
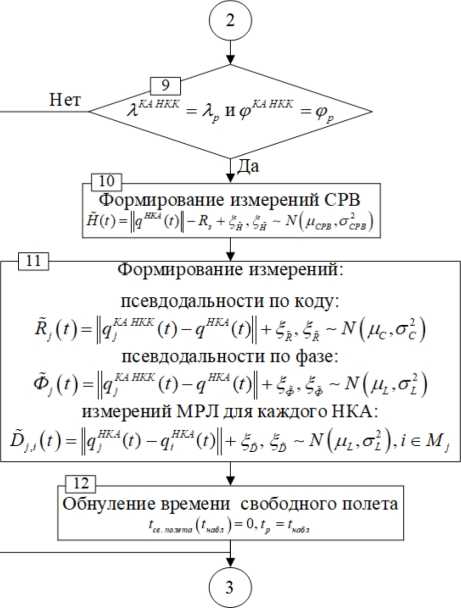
Рисунок 4. Фрагмент структурной схемы алгоритма вторичной обработки беззапросных ИТНП совместно с вспомогательными измерениями в БИК, иллюстрирующий формирование измерений
Том 10

-
15 ,
' Решение навигационной задачи псевдодальномерным методом для у—го НКА и определение его вектора состояния Q(t) = [x,y,z,3t]
-
16 ] _________________*___________________
Решение навигационной задачи псевдодальномерным методом для определения местоположения КА НКК по созвездию видимых НКА
--
Сглаживание и фильтрация ИТНП на основе полученных данных о местоположении КА НКК и НКА
К]------------ 5----------------
Формирование массивов измерений:
для псевдодальности по коду: R для псевдодальности по фазе: Ф для измерений МРЛ для каждого НКА: D,
Цикл «Обработка ТНП НКА с помощью БИК»

рансляция полученного массива ИТНП в НКУ для дальнейшей обработки и расчета ЭИ
Рисунок 5. Фрагмент структурной схемы алгоритма вторичной обработки беззапросных ИТНП совместно с вспомогательными измерениями в БИК, иллюстрирующий завершение основного цикла учета массива измерений, переданных с КА НКК.
В итоге работы алгоритма формируется массив ИТНП, который передается в НКУ для дальнейшей обработки и расчета эфемеридно-временной информации. Улучшение качества ЭВО скажется на повышении точности определения местоположения потребителей системы во всей зоне действия системы ГЛОНАСС.
Заключение
Для обеспечения паритета отечественной системы ГЛОНАСС требуется повышать качество как базовой, так и других предоставляемых навигационных услуг, что порой трудно выполнить
за счет традиционных методов. Но именно ЭВО определяет качество всех видов и типов навигационных услуг, однако улучшение данного вида обеспечения затруднительно в силу технических и математических особенностей его организации. Главной сдерживающей особенностью является территориальная ограниченность сети БИС, что не позволяет наблюдать НКА на всем участке его движения.
Использование НКК как сегмента системы ГЛОНАСС для создания радионавигационного поля повысит качество базовой услуги, но использование КА НКК в качестве динамических БИС позволит производить сбор ИТНП в интересах повышения ЭВО, что скажется не только на базовой услуге системы ГЛОНАСС.
Алгоритм вторичной обработки беззапросных измерений текущих навигационных параметров…
Предложенный алгоритм применения НКК при реализации должен позволить существенно повысить точность и оперативность ЭВО системы ГЛОНАСС. Применение данного алгоритма позволит:
– производить сбор ИТНП с территории, недоступной для наземных измерительных средств;
– повысить качество и точность ЭВО системы ГЛОНАСС.
Дальнейшим направлением исследований, помимо определения вклада НКК в точность расчета эфемеридно-временной информации, должно быть определение оптимального времени накопления ИТНП в БИК для передачи их в НКУ и количества реперных объектов на поверхности Земли с учетом особенностей траектории движения низкоорбитального КА.
Список литературы Алгоритм вторичной обработки беззапросных измерений текущих навигационных параметров бортовым измерительным комплексом космического аппарата низкоорбитального сегмента системы глонасс в интересах повышения качества эфемеридно-временного обеспечения
- Eliott D. Kaplan, Christopher J. Hegart. Understanding GPS/GNSS. Principles and Applications. London: Artech House, 2017. 1016 p.
- Карутин С. Н. Единая система координатно-временного обеспечения Российской Федерации // Материалы конференции «Радионавигация и время 2024». АО «Обуховский завод», 2024.
- Паршин И. О. Модель бортового измерительного комплекса космического аппарата низкоорбитального сегмента системы ГЛОНАСС // Х Межведомственный научно-технический семинар «Перспективы развития астрономо-геодезического обеспечения при использовании глобальной навигационной спутниковой системы ГЛОНАСС. Применение глобальной навигационной спутниковой системы ГЛОНАСС в интересах развития методов и технологий космической геодезии». СПб.: ВКА им. А. Ф. Можайского, 2025.
- Перов А. И. ГЛОНАСС. Модернизация и перспективы развития: монография. М.: Радиотехника, 2020. 1072 с.
- Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ. Общее описание системы с кодовым разделением сигналов. Редакция 1.0. М.: АО «Российские космические системы», 2016. 133 с.
- Глобальная навигационная спутниковая система ГЛОНАСС. Стандарт эксплуатационных характеристик открытого сервиса. Редакция 2.2. Королёв, 2019. 125 с.
- Аверкиев Н. Ф., Богачев С. А., Васьков С. А., Власов С. А., Кульвиц А. В., Кубасов И. Ю., Мамон П. А., Мосин Д. А., Салов В. В. Основы теории полета летательных аппаратов. СПб.: ВКА им. А. Ф. Можайского, 2013. 242 с.
- Иванов Н. М., Лысенко Л. Н. Баллистика и навигация космических аппаратов: учебник для вузов. М.: МГТУ им. И. Э. Баумана, 2016. 523 с.
- GNSS Data Processing. Vol. I: Fundamentals and Algorithms. European Space Agency, 2013. 238 p.
