Алгоритм выбора настроек автоматических регуляторов возбуждения в многомашинных энергосистемах

Автор: Игнатьев Игорь Владимирович, Ковров Артем Евгеньевич
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 1 (27), 2010 года.
Бесплатный доступ
Предложен программно реализованный алгоритм согласованного выбора настроек автоматических регуляторов возбуждения. Алгоритм основан на понятии результанта и работает применительно к математической модели энергосистемы, сформированной по экспериментальным частотным характеристикам
Автоматический регулятор возбуждения, результант, устойчивость
Короткий адрес: https://sciup.org/148176140
IDR: 148176140 | УДК: 621.311
Тhe choice algorithm of automatic excitation regulator settings for multimachine electric power systems
A program-realized coordinated choice algorithm of automatic excitation regulator settings is presented. This algorithm is based on the resultant theory and uses a mathematical model which is synthesized by experimental frequency characteristics of the electric power system.
Текст обзорной статьи Алгоритм выбора настроек автоматических регуляторов возбуждения в многомашинных энергосистемах
Обеспечение устойчивости электроэнергетических систем (ЭЭС) и демпфирование коле баний осуществляется автоматическими регуляторами возбуждения (АРВ), которыми оснащены генераторы электростанций [1].
В настоящее время актуальна задача согласованного выбора коэффициентов стабилизации АРВ по условию обеспечения в многомашинной ЭЭС требуемого качества переходных процессов.
Для решения этой задачи ранее были разработаны алгоритмы [2–4], основанные на методе Д-разбиения. Эти алгоритмы предполагают поочередный для каждой станции выбор настроек АРВ по рассчитанным областям устойчивости. При этом переход от одной станции к другой осуществляется в направлении повышения степени устойчиво сти системы. Однако в связи со сложностью используемой целевой функции эти алгоритмы не всегда обеспечивает приемлемые демпферные свойства энергосистем с большим числом АРВ.
Другой подход к решению поставленной задачи заключается в использовании алгоритмов, которые основаны на расчете собственных значений матрицы коэффициентов линеаризованных дифференциальных уравнений Горева–Парка [5–7]. Но такие алгоритмы обладают недостатками, затрудняющими оперативное управление многомашинной ЭЭС. Они характеризуются высоким порядком дифференциальных уравнений и требуют значительного объема расчетов, а также допускают усреднение на значительных временных интервалах данных об элементах крупных узлов и подсистем ЭЭС, что часто приводит к несоответствию формируемой математической модели и текущей режимной ситуации.
В работах [8; 9] было показано, что математическая модель ЭЭС может быть получена в виде характеристического полинома по экспериментальным частотным характеристикам параметров стабилизации. Такой подход позволяет избежать многих допущений и погрешностей моделирования, характерных для описанных выше расчетных методов, а также снизить размерность задачи выбора настроек АРВ, своевременно согласовав их с текущими условиями работы энергосистемы.
Авторами данной статьи предлагается новый алгоритм согласованного выбора настроек АРВ для многомашинных ЭЭС, который позволяет учесть достоинства решений, предложенных в [8; 9], и исключить недостатки разработанных ранее алгоритмов. Программная реализация нового алгоритма проведена в среде MаtLab.
Описание алгоритма согласованного выбора настроек АРВ. Разработанный авторами алгоритм основан на понятии результанта [10]. Результантом называется функция коэффициентов двух многочленов, обращение которой в нуль является условием, необходимым и достаточным для существования общего корня этих многочленов.
В качестве первого многочлена рассмотрим характеристический полином исследуемой энергосистемы
D ( P ) = a 0 P n + a l P n - 1 + a 2 P n-2 + K + a n - 1 P + a n , (1)
в коэффициенты которого входят настройки каналов стабилизации АРВ. В общем виде можно записать
r ai = ai 0 + ^^ ajkj + j=1
+Ц OM + 1И -.W. + K j = 1 k = 1 j = 1 k = 1 l = 1
где r - количество генераторов, оснащенных АРВ; k j , k k , k l ,... - коэффициенты стабилизации.
Корни полинома (1) с наименьшими по модулю действительными частями определяют степень статической устойчивости анализируемой ЭЭС и называются доминирующими.
Второй многочлен - вспомогательная функция
Q ( X ) = b 0 X m + b X m - 1 + b 2 X m - 2 + K + b m -Л + b m , (2) корни которой выбираются равными требуемым значениям доминирующих корней.
Задача заключается в том, чтобы за счет вариации коэффициентов стабилизации и, следовательно, ai обеспечить равенство доминирующих корней полинома (1) корням полинома (2). При этом полученные коэффициенты АРВ должны соответствовать значениям настроек, реализуемым на практике.
Рассмотрим этапы работы алгоритма на примере энергосистемы, для улучшения демпферных свойств которой необходимо согласовать настройки АРВ трех эквивалентных генераторов. Будем считать, что все генераторы оснащены микропроцессорными АРВ.
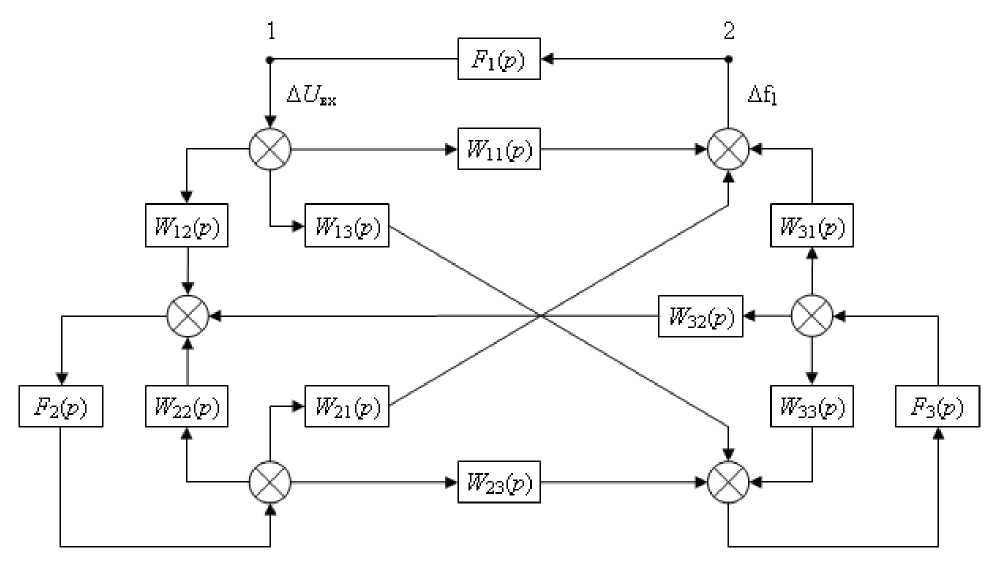
На первом этапе, основываясь на методике, предложенной в работе [8], получим математическую модель исследуемой ЭЭС в виде полинома (1). Для этого вначале выделим в системе контуры регулирования, которые включают каналы стабилизации по изменению частоты напряжения Afи ее производной f. Такой подход обусловлен тем, что в АРВ на выделенные каналы возложена функция демпфирования низкочастотных колебаний. Для математического описания этих каналов будем использовать передаточные функции F1(р), F2(р) и F3(р), индексы кото- рых соответствуют порядковым номерам генераторов.
Оставшуюся часть энергосистемы, включая другие каналы АРВ, отразим симметрично относительно выделенных контуров через собственные W 11 ( р ), W 22 ( р ), W 33 ( р ) и взаимные W 12 ( р ), W 13 ( р ), W 21 ( p ), W 23 ( р ), W 31 ( р ), W 32 ( р ) передаточные функции режимных параметров стабилизации (рис. 1).
Далее, используя формулу Мейсона [8], запишем пе- редаточную функцию регулируемой ЭЭС от входа выходу 2:
W 1 + W 12 F 2 + W 13 F 3 + W 123 F 2 F 3 ------ ,
W
р
1 - ( W F + W 22 F 2 + W 33 F 3 + W 12 F 1 F 2 +
+ W 13 F 1 F3 + W 23 F 2 F 3 + W 123 F 1 F 2 F 3 )
1 к
где W12, W13, W23, W123 - симметричные взаимные передаточные функции, которые формируются соответ- ственно минорами и определителем матрицы:
f W 11
W = W 21
w V ^31
W 12 W 13 '
W 22 W 23
W 32 W 33 J
Отметим, что в выражениях (3) и (4), как и в последую- щих сложных математических соотношениях, для упро- щения записи опущен оператор р.
Авторами данной статьи ранее проводился анализ динамических свойств современных микропроцессорных АРВ, по результатам которого была составлена передаточная функция для выделенных в ЭЭС каналов стабили- зации:
F ( р ) =
pp --+ 0,5 р , (1 + 2 р ) (1 + 0,2 р ) 1 + 0,5 р
где k 0 f - коэффициент стабилизации по отклонению частоты, k 0 f = 0...15, в относительных единицах напряжения возбуждения/Гц; k 1 f - коэффициент стабилизации по производной частоты, k 1 f = 0...5, в относительных единицах напряжения возбуждения/Гц/с.
Приводя формулу (5) к общему знаменателю, запишем передаточную функцию каналов стабилизации для АРВ i -го генератора:
Ft ( р ) =
= ( р 2 + 2 р ) k 0 f + (0,2 р 3 + 1,1 р 2 + ° 5 р ) k 1 f = f^' (6) = 0,2 р 3 + 1,5 р2 + 2,7 р + 1 = f
Подставляя выражение (6) в знаменатель (3), получим характеристический полином исследуемой ЭЭС в общем виде:
D ( р ) = А н f f 2 f 3 - W f f 2 f , -
W f f 2 f. - W^ 3 fX f 2 f ‘- W 12 f' f ‘ f 3 -
- W ' 13 f f 2 f 3 - W '23 f ff - W ' 123 f ff / , (7)
где W j , W ij , W jk - числители собственных и взаимных передаточных функций режимных параметров стабилизации; A - общий знаменатель этих функций.
Для расчета численных значений нулей и полюсов передаточных функций, входящих в формулу (7), авторами в соответствии методикой параметрической идентификации ЭЭС [9] разработана процедура, которая включает следующие шаги:
-
1) определение с помощью дискретного преобразования Фурье комплексных выборок собственных и взаимных частотных характеристик разомкнутой системы по измеренным в точках 1 и 2 (см. рис. 1) временным характеристикам замкнутой ЭЭС;
-
2) анализ конфигурации полученных частотных характеристик с целью выявления доминирующих полюсов и нулей, определяющих основные динамические свойства энергосистемы в диапазоне существенных частот;
-
3) аппроксимация остаточной частотной характеристики сглаживающей дробно-рациональной функции методом наименьших квадратов.
Подставляя в выражение (7) нули и полюсы, найденные на шаге 2, получим многопараметрическую модель анализируемой ЭЭС в виде полинома (1). В результате каждый коэффициент этого полинома будет содержать нелинейную комбинацию искомых настроек АРВ.
Второй этап работы алгоритма согласованного выбора настроек АРВ включает выполнение двух процедур: расчет корней характеристического полинома и анализ их расположения на комплексной плоскости.
Первая процедура выполняется после подстановки в выражение (1) значений коэффициентов стабилизации, установленных в АРВ каждого генератора.
Вторая процедура позволяет количественно оценить степень устойчивости анализируемой системы для теку- щей режимной ситуации. Этот показатель определяется модулем действительной части, ближайшей к мнимой оси пары сопряженных комплексных корней полинома (1).
Третий этап работы алгоритма относится к процедуре расчета вспомогательной функции и включает следующие шаги:
-
1) из всей совокупности корней характеристического полинома, отвечающих электромеханическим составляющим движения системы, выбираются m = 6 доминирующих корней. Число m определяется количеством согла-суемых коэффициентов стабилизации;
-
2) исходя из условия обеспечения требуемого качества переходных процессов в ЭЭС, задается желаемое расположение выбранных доминирующих корней на комплексной плоскости, т. е. их действительная и мнимая части;
-
3) по заданным значениям доминирующих корней рассчитываются коэффициенты b i функции (2). Таким образом, в рассматриваемом нами случае необходимо найти такие коэффициенты стабилизации, которые обеспечат равенство шести доминирующих корней полинома (1) из общего их количества n корням вспомогательной функции;
-
4) для решения поставленной задачи по правилу Силь-
- где элементы, расположенные выше a0, bm и ниже b0 и an, равны нулю.
Согласно теореме о результанте [10], для существования m общих корней многочленов (1) и (2) необходимо и достаточно выполнение условия
R ( D , Q ) = R ( D , Q ) = R 2 ( D , Q ) = к = R m _ , ( D , Q ) = 0, где R ( D , Q ) - определитель матрицы, которая формируется из матрицы M удалением ее m - 1 первых и последних строк и 2 m - 2 последних столбцов; R 1 ( D , Q ), R 2 ( D , Q ),..., Rm 1 ( D , Q ) - определители матриц, которые формируются из предыдущей матрицы поочередной заменой ее последнего столбца каждым из следующих за ним столбцов матрицы M .
Отметим, что указанные в теореме о результанте определители представляют собой нелинейные функции, содержащие в качестве переменных коэффициенты стабилизации АРВ.
В соответствии с этой теоремой рассчитаем определители R ( D , Q ), R 1 ( D , Q ),..., R 5 ( D , Q ) и запишем систему нелинейных уравнений:
-
' R ( D , Q ) = 0,
R1( D, Q) = 0, вестра составляется матрица результанта, порядок которой равен m + n:
' 0
•
•
•
a 0
a ,
•
a 1
a 2
•
•
M =
a 0 b 0
a 1 . b1 • b 0 .
a b
' n - 2
m - 1
•
•
•
•
a n - 1 bm b m - 1
•
bm
•
a n - 2
a n - 1
a
an "
•
•
•
R 2 ( D , Q ) = 0, R з ( D , Q ) = 0, R 4 ( d , Q ) = 0, . R s ( d , Q ) = 0.
, (8)
•
•
Численное решение системы уравнений (10) с помощью вычислительных процедур системы MatLab позволяет с заданной точностью найти коэффициенты стабилизации, которые обеспечивают доминирующим корням полинома (1) требуемые значения.
Если в результате расчета полученные настройки АРВ не соответствуют реализуемым на практике значениям, то корни вспомогательной функции изменяются и рас-
b 0
bm bm У
* №13»
№^31»
№^12»
?з(р)
№^32» *
* №21»
ад
№^23»
№^зз»
ад
№^22»
№^11»
Рис. 1. Трехконтурное структурное представление энергосистемы
чет производится заново, начиная с третьего этапа. В рассматриваемом в данной статье случае изменение корней функции (2) основано на движении двух крайних пар доминирующих корней навстречу друг другу.
Таким образом, решение поставленной задачи может носить итерационный характер, хотя достичь приемлемых значений настроек АРВ удается, как правило, за несколько итераций.
Пример расчета. Для проверки работоспособности разработанного алгоритма был проведен машинный эксперимент по расчету оптимальных настроек АРВ для генераторов Иркутской энергосистемы.
Для реализации поставленной цели решались следующие задачи:
-
– сбор данных об элементах Иркутской энергосистемы (параметров линий электропередач, трансформаторов, генераторов, реакторов и устройств управления);
-
– формирование модели энергосистемы в пакете Simulink;
-
– проверка адекватности разработанной модели реальной работе энергосистемы;
-
– расчет типового режима, используемого в Иркутской энергосистеме;
-
– подача возмущающих воздействий в выбранных точках ЭЭС (см. рис. 1) и запись полученных временных характеристик, отражающих динамические свойства системы;
-
– выполнение процедур алгоритма согласованного выбора настроек АРВ.
Исследования проводились с помощью пакетов расширений SimPowerSystems и Simulink системы MatLab. Пакет SimPowerSystems использовался для формирования моделей различных устройств ЭЭС: силовой части, систем регулирования, управления и измерения. Пакет Simulink применялся для разработки блоков микропроцессорных АРВ и осуществления имитационного моделирования.
Иркутская энергосистема была представлена эквивалентной моделью (рис. 2), содержащей генераторы Братской, Усть-Илимской и Красноярской ГЭС. Генерация Иркутской ГЭС также была учтена в нагрузке.
При формировании типового режима использовались данные диспетчерских ведомостей по основным системообразующим линиям 500 кВ Иркутской энергосистемы.
Для того чтобы начать моделирование с установившегося режима, производилась инициализация синхрон-
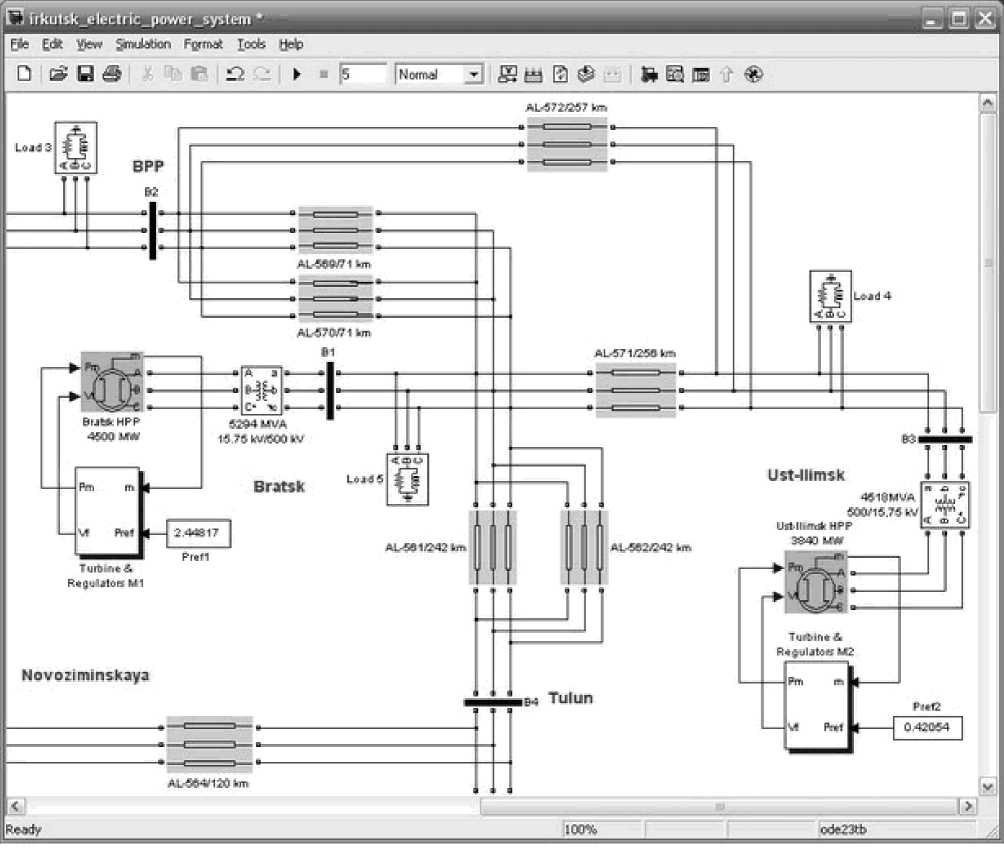
Рис. 2. Фрагмент Иркутской энергосистемы, представленный в пакете Simulink
ных генераторов и АРВ для заданного уровня нагрузки. Инициализация подразумевает установку для эквивалентного генератора Братской ГЭС режима двунаправленной передачи мощности, для Усть-Илимской и Красноярской ГЭС выбран режим выработки заданной активной мощности при поддержании постоянного статорного напряжения.
После подачи возмущающих воздействий и выполнения процедур двух первых этапов алгоритма согласованного выбора построек АРВ было получено математическое описание ЭЭС в виде полинома (1), порядок которого составил n = 28. Результаты расчета доминирующих корней этого полинома при установленных на генераторах настройках АРВ представлены в табл. 1.
Анализ данных табл. 1 показывает, что анализируемая система обладает плохими демпферными свойствами, поскольку пара доминирующих корней с мнимыми частями ω = 7,22 рад/c имеет низкое затухание a = 0,23. Для такого режима необходимо изменение настроек АРВ с целью повышения устойчивости ЭЭС. В соответствии с этим в качестве корней вспомогательной функции были заданы значения с действительной частью a < –0,6.
В результате выполнения процедур следующих этапов алгоритма были рассчитаны коэффициенты стабилизации, которые обеспечивают доминирующим корням полинома (1) заданное затухание. Результаты расчетов новых настроек АРВ приведены в табл. 2.
Расчеты, проведенные авторами с помощью программного обеспечения REGIM, SBORKA и POISK, разработанного в Санкт-Петербургском государственном техническом университете, полностью подтвердили результаты, приведенные в табл. 2. Это говорит об эффективности работы алгоритма и о возможности его использования для согласованного выбора настроек АРВ по условию обеспечения в ЭЭС требуемого уровня демпфирования переходных процессов.
Таким образом, авторами были получены следующие результаты:
-
– на основе понятия результанта предложен и обоснован алгоритм согласованного выбора настроек АРВ в многомашинных энергосистемах;
-
– новый алгоритм работает применительно к математической модели, синтезированной по экспериментальным данным;
-
– на базе машинного эксперимента показано, что предложенный алгоритм позволяет эффективно решать задачу обеспечения требуемого качества переходных процессов в ЭЭС;
-
– разработанный алгоритм позволяет существенно снизить размерность задачи выбора настроек АРВ и может быть использован в условиях реальной эксплуатации энергосистем для повышения их устойчивости.
