Алгоритм высокоточного сопровождения вторичных источников оптического излучения и его эффективность

Автор: Донцов А.А., Козирацкий Ю.Л., Прохоров Д.В.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 8 т.9, 2016 года.
Бесплатный доступ
С использованием методов теории фильтрации пространственно-временных сигналов синтезирован алгоритм высокоточного сопровождения движущегося объекта по изображению его вторичного источника оптического излучения (факела двигателя). Показано, что за счет введения процедуры оценки эквивалентного радиуса изображения факела двигателя алгоритм обеспечивает устойчивое слежение за координатами движущегося объекта с ошибкой не более двух элементов разрешения.
Высокоточное сопровождение, вторичный источник оптического излучения, нелинейная фильтрация пространственно-временных сигналов
Короткий адрес: https://sciup.org/146115148
IDR: 146115148 | УДК: 621.396 | DOI: 10.17516/1999-494X-2016-9-8-11441152
Algorithm of high-precision tracking of secondary sources optical radiation and its efficiency
With use of methods of the theory of a filtration of existential signals the algorithm of high-precision tracking of moving object according to the image of its secondary source of optical radiation (an engine torch) is synthesized. It is shown that due to introduction of procedure of an assessment of equivalent radius of the image of a torch of the engine the algorithm provides steady tracking coordinates of moving object with a mistake no more than two elements of permission.
Текст научной статьи Алгоритм высокоточного сопровождения вторичных источников оптического излучения и его эффективность
Задача автоматического сопровождения движущихся объектов предусматривает наличие в контуре управления измерителя, предназначенного для оптимальной (квазиоптимальной) оценки текущих координат объекта по информации, заключенной в сигналах различной физической природы. В качестве источника такой информации может использоваться изображение факела двигателя управляемого боеприпаса. В этом случае управление системой сопровождения возможно с помощью матричного датчика, формирующего изображение факела двигателя как вторичного источника оптического излучения. Поскольку координаты энергетического центра изображения факела двигателя управляемого боеприпаса с достаточной точностью определяют его текущее местоположение, возникает задача разработки алгоритма определения координат движущегося объекта по изображению визируемой сцены и вторичного источника оптического излучения (факела двигателя).
Постановка задачи
Задачу синтеза алгоритма определения координат будем решать на основе использования аппарата нелинейной пространственно-временной фильтрации [1-3]. Аппроксимируем движение объекта в плоскости, перпендикулярной линии визирования матричного датчика, системой стохастических дифференциальных уравнений:
д X ( t ) X ( t ) д Y ( t ) Y ( t )
—5— = —г + nx (t); r, r +ny(t)’ д t T д t T xy где X(t), Y(t) - текущие координаты объекта по горизонтальной и вертикальной осям в картинной плоскости, рассчитываемые относительно центра изображения, определяемого по-– 1145 – ложением линии визирования цели; Tx, Ty - эквивалентные постоянные времени; nx, ny - нормальные белые шумы с нулевым математическим ожиданием и спектральными плотностями Nx, Ny.
Полезный сигнал (изображение факела двигателя), наблюдаемый на текущем изображении визируемой сцены и являющийся функцией интересующих нас параметров, формально представим двумерным экспоненциальным законом вида
( X ( t ))2 ( Y ( t ))2
5(x yt) = Ae" 2R. (t)2 e" 2Ru (t)2 (2) .У. , где A - амплитуда наблюдаемого полезного сигнала; Ru (t) = Ruq + ARu (t) - эквивалентный радиус изображения факела двигателя; ARu (t) - приращение эквивалентного радиуса к априорному значению Ru0 .
Дополним систему уравнений (1) дифференциальным уравнением для значений приращения эквивалентного радиуса изображения факела двигателя
SA R uX t ) ^A R uy) + n R ( t ), (3)
R где TR - эквивалентная постоянная времени; nR - нормальный белый шум с нулевым математическим ожиданием и спектральной плотностью NR.
Представим пространственно-яркостную структуру наблюдаемого текущего изображения следующим выражением:
и ( x , у , t ) = f ( x , у ) + s ( x , у , t ) + n ( x , у , t ), (4)
где f ( x , y) - исходное изображение сцены в отсутствие движущегося объекта; n ( x , y , t ) - гауссовский однородный пространственно-временной шум наблюдения со спектральной плотностью N и корреляционной функцией вида
r (A x , A y , A t ) = N 5(A x , A y )5(A t ), (5)
где δ(Δ x , Δ y ), δ(Δ t ) – δ–функции от приращений пространственных и временной переменных соответственно.
Теперь задача синтеза алгоритма определения координат движущегося объекта может быть сформулирована как задача совместной оценки по наблюдаемому изображению (4) переменных X , Y, ЛR u , изменение которых во времени определяется уравнениями (1) и (3).
Синтез алгоритма высокоточного сопровождения
Введем единообразную систему обозначений оценок переменных Xi, Y , K R< u , подлежащих определ нию
А А А А . А А А
X = ( Х 1 , ^ 2 , 2 3 ) = ( X , Y , A R u ).
Тогда в соответствии с [2] в гауссовском приближении квазиоптимальные оценки пере-„ „ „
Менных ( Л , ^ 2 , Л , ) по наблюдаемому изображению и ( x , у , t ) представляются следующими выражениями в векторно-матричной форме:
dX! dt = a( t, X) + R(t)F1( t, X),(7)
dR , d = N + a,( ,.w + R№aT(,, X) + R№(., X)R(.),, где a(t, X) = (-X1 / Tx, - X2 / Ty, -X3 / TR)T ; a1(t, X) - матрица размерности 3x3 с элементами А А А А А А АА ay =дai(t,ЬУд^; F1(t,^) =(dF(t,^Уд%-,дF(t,^Уд^зУ F2(t,^) - матрица размерности 3x3 с элементами Fij = d2F2(t,X)/ dijdij; N - диагональная матрица размерности 3x3 с элементами Nn = Nx, N22 = Ny, N33 = NR ;
F ( t , x ) =-^7 Я [ u ( x , y , t ) - ( f ( x , y ) + 5 ( x , y , t ))] 2 dxdy
2 N M
– функционал правдоподобия [3]; M – область определения изображения.
Определение дискриминационных характеристик алгоритма
Рассмотрим более подробно элементы д F ( t , X )/ d^ i вектора F ^ ( t , X ), математические ожидания которых можно интерпретировать как дискриминационные характеристики многосвязной следящей системы, устанавливающие связь между наблюдаемым текущим изображением сцены и регулирующим воздействием по соответствующей координате. По аналогии с [4-7] упростим выражение (9) для функционала правдоподобия F ( t , X ). После возведения в квадрат подинтегрального выражения, перегруппировки слагаемых и исключения из дальнейшего рассмотрения слагаемых, не зависящих от оцениваемых переменных, выражение для функционала правдоподобия может быть представлено в упрощенном виде:
2 2
2+(v
F ( t, X ) = A JJ u ( x , y, t ) exp( - l x- ^ 12 ( y ^ 2) ) dxdy . (io)
NM 2( R u 0 +
Теперь после дифференцирования выражения (10) по Л 1 , Л 2, Л з элементы вектора F 1 ( t , X ) принимают следующий вид:
„ - ( X - i ^)2 + ( ,-^ 2 ?
дF(,,^ SA, = -flu(X.y,,)(RUo0 + ^J^)2 e 2^.*У dxdy,
. - ( x - 2 1 ) 2 + ( y - ^ 2 ) 2
dF(t,i)Zd.i2 = A JJu(x,y,t) y-Л? 2 e 2(Ru•+V' dxdy,(12)
NM ( R u 0 + Я , )
A«< x - +(.- d( t,)d A3 = ^Jf u (x. y,t) ([iu 0 + ;.3)3 e dxdy-. (3)
На рис. 1 представлена дискриминационная характеристика сист е мы слежения за координатами центра изображения факела двигателя в горизонтальной плоскости, рассчитанная с помощью вырэжения (11) и определяющая зависимость сигнала управления на выходе дискриминатора от ошибки оценивания координат X i - X i (Х1 - истинное значение координаты объекта в горизонтальной плоскости, измеряемое в элементах разрешения (э. р.) изображения). Дискриминационная характеристика рассчитана для следующей совокупности исходных данных:
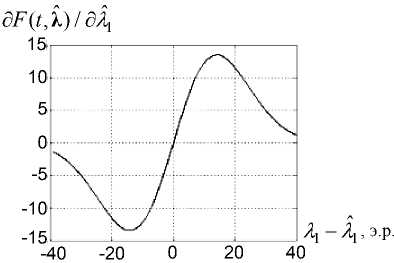
Рис. 1. Дискриминационная характеристика системы слежения за координатами
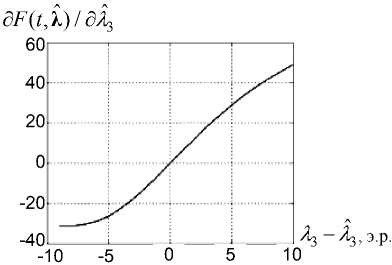
Рис. 2. Дискриминационная характеристика системы слежения за приращением радиуса
А
A =1; Л 2 - Х 2 =0 э. р.; R u о =10 э. р.; Л 3 =0 э. р. В качестве изображения фона f ( x , у ) использовалось си тезированное ме дами комп ю ерной графи и гауссовское случайное поле с заданными параметрами закона распределения яркостей элементов изображения ( т ф = 0, о ф = 0,1 - математическое ожидание и СКО яркости элементов изображения фона) и изотропными корреляционными войствам .
Из рис. 2 представлена дискриминационная характеристика системы слежения за при-раще ием экви а е тного а и са из р жения факела двигателя, рассчитанная с помощью вы ения (1 ) (λ3 – и тинное значение приращения эквивалентного радиуса), при условии, что A =1; 5 1 - 5 1 =0 э. р.; 5 2 - 5 2 =0 э.р.; R u о =10 э. р. Из рис. 1 и 2 видно, что дискриминационные характеристики в окрестности истинных значений параметров линейны.
Уточнение дифференциальных уравнений квазиоптимальной фильтрации
Си Стема диф ференцИальных уравнений квазиоптимальной фильтрации, полученная с помощью (7), (11) - (13) в предположении о некоррелированности ошибок оценки рассматриваемых параметров ( R y = 0, при i ^ j ) и соответствующая выражениям (1) - (4), имеет вид
ˆˆ ˆ - ( x - λ ˆ 1 )2 + ( y - λ ˆ 2 )2
∂ λ 1 =- λ 1 + AR 11 u ( x , y , t ) x - λ 1 e 2( R u 0 + λ ˆ3)2 dxdy ,
∂ tT x N M ∫∫ ( R u 0 + λ ˆ 3 ) 2
А А А А
- ( x - λ 1 )2 + ( y - λ 2 )2 ∂ λ 2 =- λ 2 + AR 22 u ( x , y , t ) y - λ 2 e 2( R u 0 + λ ^ ˆ3)2 dxdy ,
∂ tT y N M ∫∫ ( R u 0 + λ ˆ 3 ) 2
А А
∂ λ 3 =- λ 3 ∂ t =- T R +
AR
33 ∫∫ u ( x , y , t ) NM
А П А п
( x - λ ˆ 1 ) + ( y - λ ˆ 2 )
( R u 0 + λ ˆ 3 ) 3
( x - λ 1)2 + ( y - λ 2)2
e 2( R u 0 + λ 3 ) dxdy .
Общая структура синтезированного алгоритма пределения коорди ат движ г ся объекта, соответствующая (14), приведена на рис. 3. Она представляет собой схем у многоканальной следящей системы, осуществляющей слежение за центром и обра ения ф к ла двигател я. П ри этом замыкание петель обратной связи производится по переменным Л 1 и Л 2
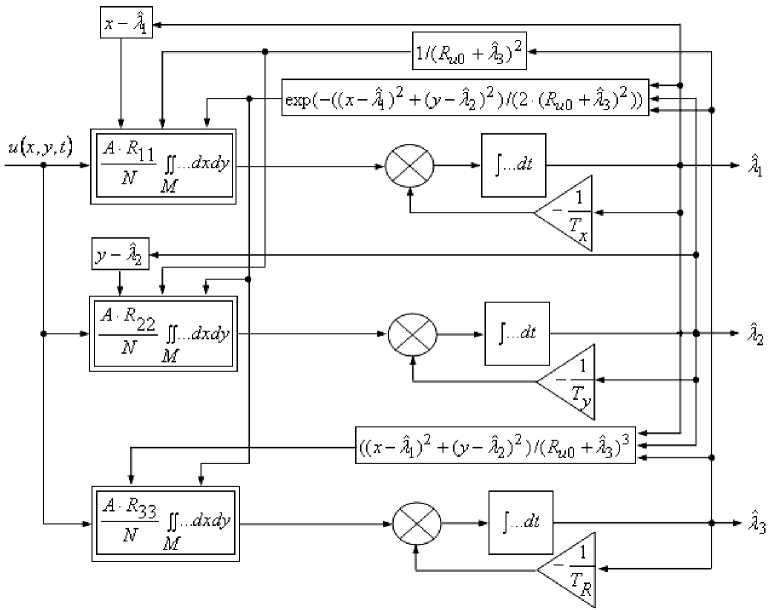
Рис. 3. Структура синтезированного алгоритма
, являющимея оценка ми координат движущегося объекта. О с обенность данной системы заключается в возмо ности слеж н я за риращением эквивалентного радиуса изображения факела двигателя Я 3 и последующего использования для обработки не только всего наблюдаемого изображения, ограниченного областью M , но и части наблюдаемого изображения, ограниченного пространственным стробом с размерами сторон, пропорциональными значению текущего радиуса.
При этом наличие пространственного строба, в пределах которого выполняется обработка, является существенным фактором, определяющим высокую помехозащищенность синтезированного алгоритма от преднамеренных помех.
Исследование эффективности синтезированного алгоритма
С использованием выражений (14) разработана имитационная модель системы слежения, которая позволила провести оценку точности определения текущих координат движущегося объекта. В качестве показателя эффективности использовалось СКО ошибок измерения оцениваемых текущих параметров полезного сигнала относительно заданных при моделировании.
В качестве изображений фона в разработанной модели применены синтезированные методами компьютерной графики гауссовские случайные поля с заданными параметрами закона распределения яркостей элементов изображения ( т ф = 0,5, о ф = 0,1) и изотропными корреляционными свойствами.
В цепи отрабо тки ошибок слежения в модели использовались динамические 3 венья с пере - ат ной нкци й разомкнутой петли отработки этих ошибок вида
K p (Tp +1)
На вход этой
передаточной функции с параметрами K = 15 V, T = 0,03 c подавались сигналы управления с
, дF (t , X ) д F (t , X )
с дискрими„аторо. ( . .. -^
дF (t, X) — / дХз
А А А
), а с выхода снимались сигналы Я ^ , Я 2 , Я 3 .
Коэффициенты R 1 1, R 22, R ^ 33 определялись заблаговременно решением стационарной системы обыкновенных дифференциальных уравнений (8). Значение эквивалентного радиуса изображения факела двигателя R и 0 составляло 10 элементов разрешения.
В результате имитационного моделирования процесса слежения за координатами объекта, движение которого представлялось как случайный процесс с нулевым математическим ожиданием,среднеквадратическим отклонением порядка 15 элементов разрешения и интерва-2
…3 с, установлено, что синтезированный алгоритм обеспечивает устойчивое слежение за координатами движущегося объекта с ошибкой не более двух элементов разрешения (а0 = 2), что позволяет сделать вывод о его достаточно высокой эффективности.
Кроме того, получены результаты, давшие возможность оценить эффективность функционирования синтезированного алгоритма. На рис. 4 сплошной линией представлен нормированный к о0 график зависимости изменения СКО ошибок измерения координат движущегося объекта от отношения реального значения эквивалентного радиуса изображения факела двигателя к априорно заданному ( Rи / Rи 0) при отсутствии канала слежения за эквивалентным радиусом изображения факела двигателя.
Видно, что алгоритм обеспечивает устойчивое слежение за координатами движущегося объекта с ошибкой не более трех элементов разрешения при условии, что значение реального эквивалентного радиуса отличается от априорно заданного не более чем в 2 раза. В противном случае ошибки слежения значительно возрастают (в 2 раза и более).
Пунктирной линией на рис. 4 представлен нормированный график зависимости изменения СКО ошибок измерения координат объекта от отношения реальной интенсивности изо-
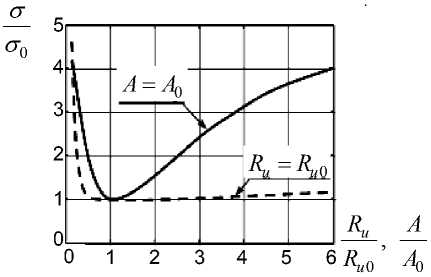
Рис. 4. Нормированные графики зависимости о / ао от Ru / Ru 0 ( —) и А / А о (—)
бражения факела двигателя к заданной априори ( А /А 0) (при наличии канала слежения за эквивалентным радиусом изображения факела двигателя). Полученные результаты позволяют сделать вывод о том, что несоответствие значений реальной амплитуды полезного сигнала и априорно заданной практически не влияет на качество слежения за текущими координатами движущегося объекта с помощью разработанного алгоритма. Это объясняется тем, что изменения значений реальной амплитуды полезного сигнала приводят к изменению значений оцениваемого эквивалентного радиуса изображения факела двигателя и также косвенно учтены в структуре синтезированного алгоритма.
Заключение
С использованием аппарата нелинейной пространственно-временной фильтрации синтезирован алгоритм определения координат движущегося объекта по изображению визируемой сцены и факела двигателя управляемого боеприпаса как вторичного источника оптического излучения. Результаты синтеза положены в основу имитационной модели системы слежения, воспроизводящей процесс работы алгоритма и выработки команд в контур высокоточного сопровождения объекта.
Проведена оценка точности слежения за текущими координатами движущегося объекта в условиях отсутствия достоверной информации о параметрах изображения факела двигателя. Полученные результаты говорят об эффективности синтезированного алгоритма и возможности его использования для высокоточного сопровождения объектов с вторичными источниками оптического излучения.
Список литературы Алгоритм высокоточного сопровождения вторичных источников оптического излучения и его эффективность
- Баклицкий В.К., Юрьев А.Н. Корреляционно-экстремальные методы навигации. М.: Радио и связь, 1982. 256 с.
- Тихонов В.И. Оптимальный прием сигналов. М.: Радио и связь, 1983. 320 с.
- Юхно П.М. Траекторно-пространственная фильтрация в корреляционноэкстремальных системах. Автоматика и телемеханика, 1992, 7, 79-86
- Козирацкий Ю.Л., Донцов А.А., Козирацкий А.Ю. Прохоров Д.В. и др. Обнаружение и координатометрия оптико-электронных средств, оценка параметров их сигналов. М.: Радиотехника, 2015. 456 с.
- Донцов А.А., Чернухо И.И. Синтезианализалгоритмаоценкикоординатобъекта, маркированного оптическим источником излучения. Радиотехника, 2011, 8, 17-21
- Донцов А.А. Синтез алгоритма определения координат движущегося объекта по изображению визируемой сцены. Вестник Воронежского военного института, Воронеж: ВИРЭ, 2007, 1, 87-94
- Гарин Е.Н., Ратушняк В.Н. Определение местоположения, взаимного положения и пространственной ориентации подвижных зенитно-ракетных комплексов и средств радиолокации по сигналам СРНС. Успехи современной радиоэлектроники, 2014, 12, 17-20
