Алгоритмические методы обеспечения электромеханической совместимости асинхронных электроприводов при питании от преобразователей частоты

Автор: Татаринов Денис Евгеньевич, Козярук Анатолий Евтихиевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 4 т.16, 2016 года.
Бесплатный доступ
Для исследования электромеханической совместимости асинхронного электропривода разработана компьютерная модель. На компьютерной модели исследовано влияние частоты ШИМ-инвертора и величины нагрузки на валу асинхронного двигателя на уровень пульсаций электромагнитного момента. Приведены результаты моделирования и сформированы рекомендации по модификации алгоритмов управления преобразователем, повышающие электромеханическую совместимость асинхронного электропривода.
Электромеханическая совместимость, пульсации электромагнитного момента, высшие гармоники, автономный инвертор напряжения, асинхронный электропривод, широтно-импульсная модуляция
Короткий адрес: https://sciup.org/147158380
IDR: 147158380 | УДК: 621.314.263 | DOI: 10.14529/power160410
Algorithmic methods of providing electromechanical compatibility in asynchronous drive with variable-frequency power supply
A computer model was developed for to research purpose of electromechanical compatibility in asynchronous drive. On the basis of Based on this computer model, the influence of PWM-VSI’s inverter frequency and load value of asynchronous motor shaft load on the level of electromagnetic torque pulsing was investigated. Results of modeling are presented and recommendations for converter’s control algorithms modification, and improving electromechanical compatibility of asynchronous drive, are formulated.
Текст научной статьи Алгоритмические методы обеспечения электромеханической совместимости асинхронных электроприводов при питании от преобразователей частоты
Под электромеханической совместимостью в электроприводах понимают способность электропривода нормально функционировать при питании от источника, не обеспечивающего нормированное качество электроэнергии, и не оказывать недопустимого влияния на работу исполнительного механизма электропривода [1, 2].
В современных частотно-регулируемых электроприводах переменного тока на основе асинхронных электродвигателей (АД) с короткозамкнутым ротором, выходное напряжение автономного инвертора представляет собой высокочастотную последовательность прямоугольных импульсов, длительность которых изменяется по синусоидальному закону, поэтому выходное фазное напряжение может быть представлено рядом Фурье [3, 4]:
µU
UфA = DC sin(Ωt) + ∑ UmM sin(mωнt) + m=∞ n=∞
+ ∑ ∑ UnM sin(mωн ±nΩ)t,(1)
m = 1 n = 1
где µ – коэффициент модуляции, его величина задается системой управления и может регулироваться в диапазоне от 0 до 1; UDC – постоянное напряжение на входе инвертора; Ω – частота основной гармоники на выходе инвертора; ω н = 2 π fШИМ – несущая частота или частота широтно-импульсной модуляции напряжения инвертора.
То есть выходное фазное напряжение статического преобразователя содержит: основную гармонику напряжения, частота которой равняется Ω , а амплитуда равна µUDC /2 (частота и амплитуда напряжения могут плавно регулироваться системой управления электропривода); гармоники напряжения, частоты которых кратны несущей частоте ωн , амплитуды которых равны UmM ; комбинационные гармоники, частоты которых равны сумме и разности несущей и основной гармоник mωн ± nΩ с амплитудами UnM .
Гармонические составляющие напряжения статора вызывают появление соответствующих гармоник тока и магнитного потока, которые можно разложить в гармонический ряд следующим образом [4]:
Icт = Im sin(Ωt+ ϕ) +m∑=∞ImM sin(mωнt) + m=1
m =∞ n =∞
+ ∑ ∑ InMsin(m ω н ± n Ω )t; (2)
m = 1 n = 1
Ψ рот = Ψ msin( Ω t + ϕ 2) + m ∑=∞ Ψ mM sin(m ω нt) + m = 1
m =∞ n =∞
+ ∑ ∑ Ψ nMsin(m ω н ± n Ω )t, (3)
m = 1 n = 1
где Im , Ψ m – амплитудные значения тока статора и потокосцепления ротора.
Взаимодействие гармоник тока статора и потокосцепления ротора одного порядка создают постоянные электромагнитные моменты. Уравнение такого момента можно записать в следующем виде:
M (n) = I ст(n) Ψ рот(n) sin( θ (n) ) . (4)
При взаимодействии гармонических составляющих тока статора и потокосцепления ротора разного порядка, частота вращения и угол между которыми разные по величине и изменяются во
Электромеханические системы времени, создаются пульсирующие электромагнитные моменты, которые можно описать следующим уравнением:
M (ip) = I ст(i) Ψ рот(p) sin( θ (ip) ), (5) где M(ip) – высокочастотная гармоника электромагнитного момента, которая создается в результате взаимодействия i -й гармоники тока статора и p -й гармоники потокосцепления ротора, между которыми образуется ip -й угол; Iст(i) – высокочастотная гармоника тока статора; Ψ рот(p) – высокочастотная гармоника потокосцепления ротора; θ (ip) – угол между i -й гармоники тока статора и p -й гармоники потокосцепления ротора.
Анализ выражений (1)–(5) показывает, что при увеличении частоты ШИМ возрастают как частоты гармоник напряжения, кратные несущей частоте ω н , так и частоты комбинационных гармоник m ω н ± n Ω . Отсюда можно сделать вывод, что для обеспечения электромеханической совместимости приводного двигателя с преобразователем целесообразно частоту широтно-импульсной модуляции устанавливать по возможности наиболее высокой. В этом случае токи обмотки статора, обусловленные высшими гармониками напряжения, будут малы, что объясняется большим индуктивным сопротивлением на повышенных частотах. Отсюда следует, что колебания электромагнитного момента не будут существенно ухудшать вибро-акустические показатели двигателя.
В данной публикации рассмотрено влияние несинусоидального выходного напряжения стати- ческого преобразователя на АДи, сформированы рекомендации по обеспечению электромеханической совместимости преобразователя с двигателем.
Схема, модель и параметры асинхронного электропривода
Функциональная схема системы векторного регулирования скорости представлена на рис. 1. Система регулирования построена в системе координат dq, вращающейся вместе с управляемым вектором потока ротора, для чего выполнены соответствующие координатные преобразования. В такой системе дифференциальные уравнения, описывающие двигатель, принимают простейший вид, а управление вектором сводится к управлению величиной и знаком его проекций на соответствующие оси. Система содержит регулятор скорости (ПИ-РС), задающий необходимый электромагнитный момент двигателя (M*), изменение которого осуществляется векторным регулятором статорного тока, состоящего из двух скалярных регуляторов d и q (ПИ-РТ d и ПИ-РТ q ) и использующего в качестве обратной связи измеренный и преобразованный в систему dq реальный вектор статорного тока. Регулятор тока формирует в системе dq вектор напряжения статора, характеризующийся двумя составляющими: u sd и u sq , которые переводятся в неподвижную систему координат αβ, связанную со статором, затем преобразуются векторным модулятором в сигналы управления драйверами транзисторных модулей АИН, а он, в свою очередь, формирует питающее двигатель напряжение [5, 6].
Для рассматриваемой функциональной схемы векторного регулирования скорости АД разрабо-
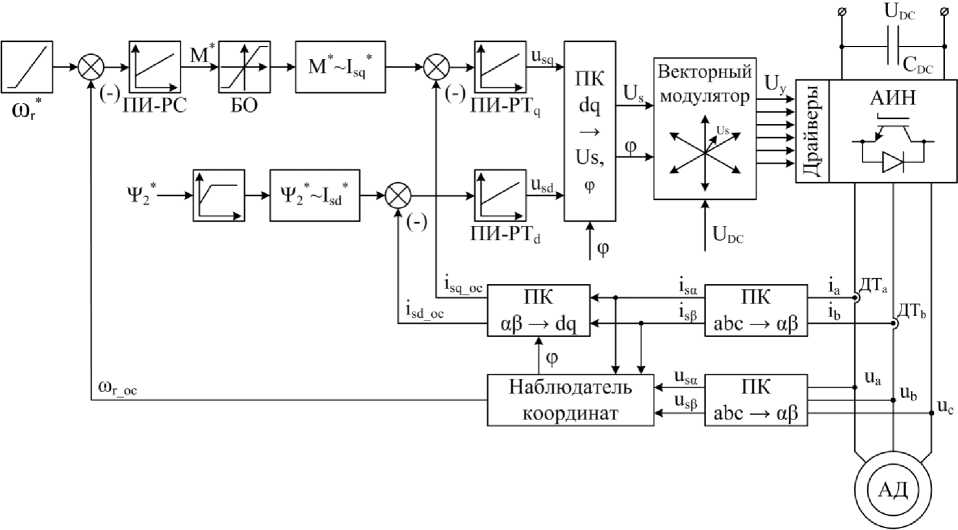
Рис. 1. Функциональная схема системы векторного регулирования скорости АД в осях dq
Татаринов Д.Е., Козярук А.Е.
тана компьютерная модель электропривода в MATLAB-Simulink, представленная на рис. 2 и 3. Изменение параметров Т-образной схемы замещения в компьютерной модели АД не учитывается в связи с отсутствием необходимости точного регулирования выходных координат двигателя. Сопротивления обмоток приняты для нагретого состояния двигателя. Модель электропривода содержит: источник питания, представленный звеном постоянного тока (ЗПТ); автономный инвертор напряжения (АИН), содержащий трехфазный транзисторный мост по схеме Ларионова; систему управления инвертором (СУ АИН), формирующую импульсы управления транзисторами (VT1…VT6); систему управления электроприводом (СУЭП), состоящую из наблюдателя потока (Flux_looker), и наблюдателя скорости (Speed_looker), формирующую управляющие напряжения UAy, UBy, UCy = л/3Uф/Udc (о.е.) и реализующую векторный полеориентированный закон управления; асинхронный двигатель (АД); датчики напряжения и тока (ДН_abс, ДТ_abc); блок формирования нагрузки (БФН), который в зависимости от сигнала управления Uy формирует постоянный момент сопротивления на валу АД,
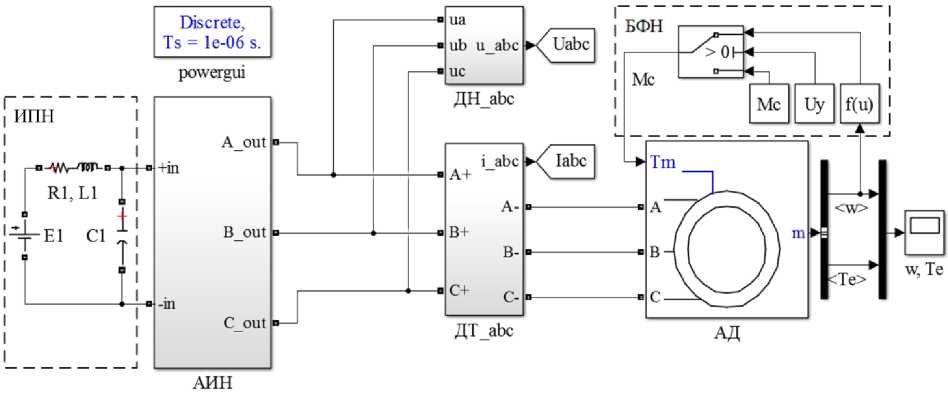
Рис. 2. Схема модели привода с АИН и АД
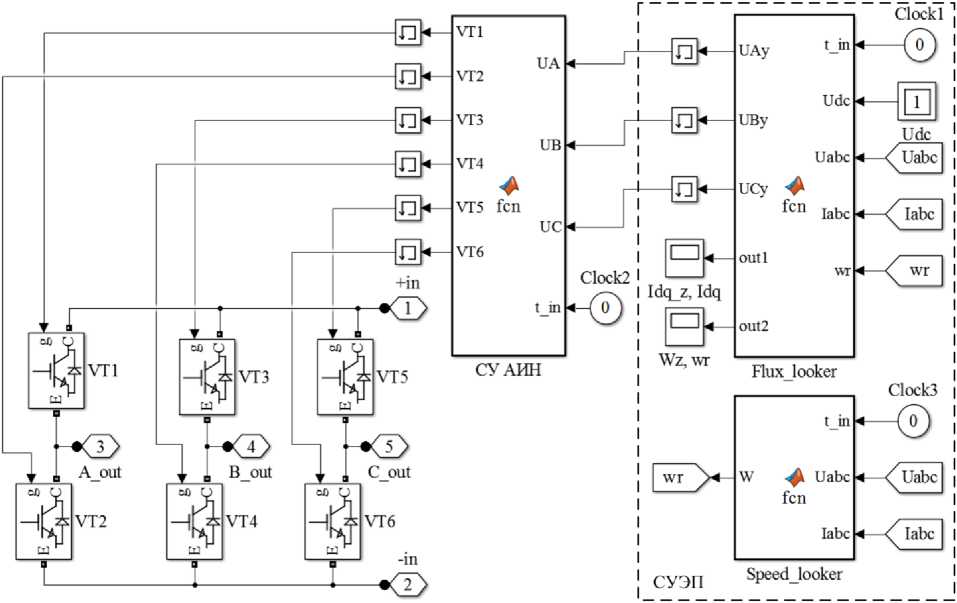
Рис. 3. Схема блока АИН
Электромеханические системы л иб о мом е нт с опрот ивл е н ия пропорци о на л ьн ы й квадрату скорости.
В данной работе рассматривается вопрос электромеханической совместимости преобразователя с двигателем в установившемся режиме работы, а именно влияние несинусоидальности выходного напряжения инвертора на пульсации электромагнитного момента двигателя, поэтому для упрощения расчетов первичный преобразователь не рассматривается, а напряжение питания инвертора принято идеально сглаженным и представлено источником постоянного напряжения E1 c индуктивностью L1, активным сопротивлением R1 и током I1.Напряжение питания АИН 550 В. Исследования выполнены при номинальных параметрах двигателя: напряжение питания 380 В, 50 Гц, мощность 20 кВт, коэффициент мощности 0,415, скольжение 4,15 %, индуктивность рассеяния статора 3,35 мГн, индуктивность намагничивания 8,58 мГн, индуктивность рассеяния ротора 2,23 мГн, активное сопротивление статора 0,0712 Ом, активное сопротивление ротора 0,1175 Ом, КПД = 0,775, индуктивность сглаживающего дросселя 220 мкГн, емкость фильтрового конденсатора 30 мФ.
Исследование электромеханической совместимости асинхронного электропривода
На компьютерной модели привода был выполнен ряд численных экспериментов, в результате которых рассчитаны пульсации электромагнитного момента АД. Производилась оценка пульсаций электромагнитного момента в зависимости от момента сопротивления (M c ) на валу АД при разных значениях частоты ШИМ инвертора и номинальной частоте вращения двигателя, а также при частотном регулировании скорости двигателя и моменте сопротивления вентиляторного типа.
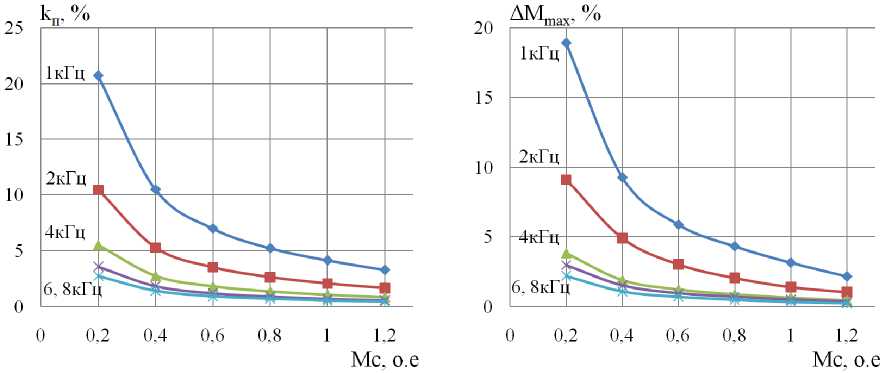
Результаты исследований представлены на рис. 4 и 5, а также сведены в табл. 1 и 2 для несущей частоты 2 кГц.
а)
б)
Рис. 4. Зависимости коэффициента пульсаций (а) и максимальной амплитуды пульсаций (б) электромагнитного момента АД от нагрузки на валу Мс
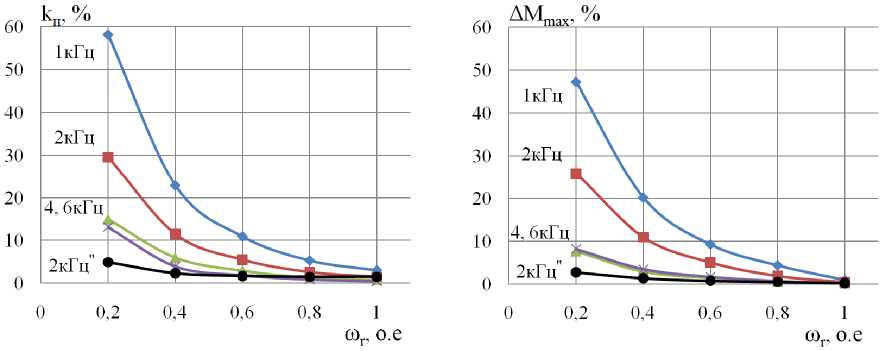
а)
б)
Рис. 5. Зависимости коэффициента пульсаций (а) и максимальной амплитуды пульсаций (б) электромагнитного момента АД при частотном регулировании скорости АД
Татаринов Д.Е., Козярук А.Е.
Таблица 1
Результаты расчета пульсаций электромагнитного момента в зависимости от Мс при fШИМ = 2 кГц
|
w r , o.e. |
M с , o.e. |
K м |
k п , % |
ΔM max , % |
|
1 |
0,2 |
1 |
10,46 |
9,12 |
|
0,4 |
5,26 |
4,9 |
||
|
0,6 |
3,51 |
3,02 |
||
|
0,8 |
2,62 |
2,05 |
||
|
1 |
2,06 |
1,4 |
||
|
1,2 |
1,64 |
1,03 |
Таблица 2
Результаты расчета пульсаций электромагнитного момента при частотном регулировании скорости АД при f ШИМ = 2 кГц
|
w r , o.e. |
M с , o. e . |
U DC = const |
U DC = var |
||||
|
K м |
k п , % |
ΔM max , % |
K м |
k п , % |
ΔM max , % |
||
|
0,2 |
0, 043 |
0,2 |
29,53 |
25,8 |
1 |
4,91 |
2,76 |
|
0,4 |
0,17 |
0,4 |
11,47 |
10,9 |
2,29 |
1,39 |
|
|
0,6 |
0,38 |
0,6 |
5,49 |
5,02 |
1,67 |
0,778 |
|
|
0,8 |
0,66 |
0,8 |
2,6 |
1,85 |
1,46 |
0,521 |
|
|
1 |
1 |
1 |
1,48 |
0,392 |
1,48 |
0,229 |
|
Рекомендации по обеспечению электромеханической совместимости электропривода
Как видно из рис. 4 и 5, а также представленных табличных данных, уменьшение момента сопротивления на валу АД приводит к возрастанию пульсаций электромагнитного момента двигателя в несколько раз, а увеличение частоты ШИМ инвертора позволяет их снизить. Соответственно, автоматическая подстройка частоты ШИМ инвертора на максимальную при уменьшении нагрузки на двигатель, и наоборот, когда нагрузка на двигатель высока – снижение частоты ШИМ (для экономии энергии), позволит снизить пульсации электромагнитного момента в 7…10 раз при малых нагрузках на валу АД, а вместе с тем уровень шума и вибрации двигателя.
Снижение пульсаций электромагнитного момента и следовательно, уровня шума и вибрации двигателя при частотном регулировании скорости позволяет осуществить подстройка напряжения звена постоянного тока преобразователя с целью поддержания постоянства коэффициента модуляции Kм = Uab /UDC при снижении частоты питания АД (зависимости 2 кГц" на рис. 5). Поддержание постоянства коэффициента модуляции при частотном регулировании позволило снизить пульсации электромагнитного момента ориентировочно в 2…10 раз.
В работе [7] проводилось исследование влия-
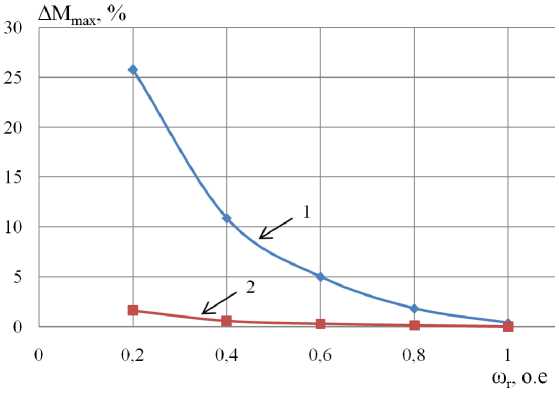
Рис. 6. Зависимости максимальной амплитуды пульсаций электромагнитного момента при постоянной частоте ШИМ 2 кГц (1) и переменной частоте ШИМ 1,5…2,5 кГц (2) от частоты вращения АД
Электромеханические системы
ние алгоритма с переменной частотой ШИМ на снижение высокочастотных пульсаций электромагнитного момента, в котором частота ШИМ инвертора изменялась по периодическому закону. Недостатком такого метода являлась возможность возникновения частотного резонанса при совпадении периода изменения частоты ШИМ в заданном диапазоне частот с периодом питающих двигатель токов, сопровождающаяся сильным увеличением пульсаций электромагнитного момента.
В данной работе предлагается изменять частоту ШИМ инвертора по случайному закону с равномерным распределением. Результаты исследования пульсаций электромагнитного момента при постоянной и переменной частоте ШИМ инвертора представлены на рис. 6.
Применение алгоритма с переменной частотой ШИМ позволило снизить амплитуды высокочастотных пульсаций электромагнитного момента ориентировочно в 10…15 раз, распределяя их по спектру [7].
Заключение
Результаты представленных исследований показывают возможность обеспечения электромеханической совместимости средствами управления электропривода, а именно снизить коэффициенты нелинейных искажений тока и напряжения инвертора, а также уровень пульсаций электромагнитного момента двигателя.
Список литературы Алгоритмические методы обеспечения электромеханической совместимости асинхронных электроприводов при питании от преобразователей частоты
- Электрический привод. Термины и определения/С.К. Козырев, А.С. Анучин, А.Е. Козярук и др.; под ред. С.К. Козырева. -М.: Изд-во МЭИ, 2015. -96 с.
- Вершинин, В.И. Электромагнитная и электромеханическая совместимость в электротехнических системах с полупроводниковыми преобразователями/В.И. Вершинин, В.А. Загривный, А.Е. Козярук. -СПб.: Санкт-Петербургский горный институт, 2000. -67 с.
- Тиристорные преобразователи частоты в электроприводе/А.Я. Бернштей, Ю.М. Гусяцкий, А.В. Кудрявцев, Р.С. Сарбатов; под ред. Р.С. Сарбатова. -М.: Энергия, 1980. -328 с.
- Васильев, Б.Ю. Электропривод. Энергетика электропривода/Б.Ю. Васильев. -М.: СОЛОН-Пресс, 2015. -268 с.
- Козярук, А.Е. Современное и перспективное алгоритмическое обеспечение частотно-регулируемых электроприводов/А.Е. Козярук, Р.В. Рудаков; под общ. ред. А.Г. Народицкого. -СПб.: Санкт-Петербургская электротехническая компания, 2002. -88 с.
- Усольцев, А.А. Частотное управление асинхронными двигателями: учеб. пособие/А.А. Усольцев. -СПб: СПбГУ ИТМО, 2006. -94 с.
- Татаринов, Д.Е. Обеспечение электромеханической совместимости в частотно-регулируемых асинхронных электроприводах при регулировании частоты ШИМ/Д.Е. Татаринов, А.С. Григорян, И.А. Пименова//Вестник ЮУрГУ. Серия «Энергетика». -2016. -Т. 16, № 1. -С. 80-86 DOI: 10.14529/power160112
