Алгоритмы обработки информационного сигнала компьютерной интерференционной системы контроля негладких поверхностей

Автор: Майоров Евгений Евгеньевич, Машек А.Ч., Удахина С.В., Цыганкова Г.А., Хайдаров Г.Г., Черняк Т.А.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Разработка приборов и систем
Статья в выпуске: 4 т.25, 2015 года.
Бесплатный доступ
В работе представлена компьютерная интерференционная система измерения негладких поверхностей (возможные вариации рельефа), а также приведены ее преимущества над традиционными системами контроля. Предложены алгоритмы обработки интерференционного сигнала по методу дифференцирования огибающей и методу площадей. Простое математическое выражение Δ z = N z h d дает информацию о расстоянии до контролируемой поверхности объекта. Показана оптико-электронная компьютерная обработка интерференционного сигнала, рассмотрены блок-схемы синхронизации и формирования сигналов управления.
Компьютерная интерференционная система, доплеровская частота, синхронизация, опорное зеркало, рельеф поверхности
Короткий адрес: https://sciup.org/14265000
IDR: 14265000 | УДК: 681.787.7:
Algorithms of processing of the information signal of the computer interference control system of non-smooth surfaces
The article a computer interference control system of non-smooth surfaces (variations of the relief), and advantages over traditional control systems are presented. Algorithms of processing of the interference signal according to the method of differentiation and the method of squares are conducted. The mathematical expression that gives information about the distance to the measured surface of the object is received. Optoelectronic computer processing of the interference signal, the block diagram of the synchronization and generation of control signals are considered. Description of computer interference and formation of the desired information on the surface topography of the object are considered. Algorithmic processing of the information signal of the system as an effective tool for the control of the surface shape of the object are presented.
Текст научной статьи Алгоритмы обработки информационного сигнала компьютерной интерференционной системы контроля негладких поверхностей
В настоящее время стремительными темпами развиваются оптико-электронные компьютерные системы (ОЭКС) в оптическом приборостроении. Одно из направлений (ОЭКС) занимают компьютерные интерференционные системы (КИС) контроля негладких поверхностей [1–4]. КИС удовлетворяют требованиям производственного контроля, малогабаритны, бесконтактны и просты в эксплуатации. Работа этих систем основана на анализе светового излучения, отраженного от измеряемой поверхности. Основные преимущества КИС перед традиционными голографическими интерференционными системами в том, что на них не накладываются какие-либо требования к повышенной виброзащите, а также они пригодны для решения динамических задач. Поэтому это направление в оптическом приборостроении, относительно новое, интенсивно развивается последние 8–10 лет.
используется суперлюминесцентный диод 1 с длиной волны λ = 1.3 мкм, длиной когерентности l c =
ОПИСАНИЕ КОМПЬЮТЕРНОЙ ИНТЕРФЕРЕНЦИОННОЙ СИСТЕМЫ
Для измерения поверхности объекта со сложной вариацией рельефа была разработана компьютерная интерференционная система (КИС), схема которой приведена на рис. 1. Схема построена на основе интерферометра Майкельсона, в качестве источника излучения
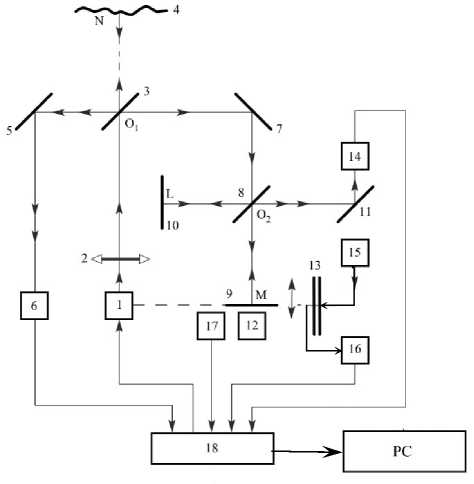
Рис. 1. Схема компьютерной интерференционной системы.
1, 15 — суперлюминесцентные диоды; 2 — микрообъектив; 3, 8 — светоделители; 4 — объект; 5, 7, 9, 10, 11 — зеркала; 6, 14, 16 — фотоприемники; 12 — модулятор; 13 — дифракционные решетки; 17 — датчик скорости; 18 — блок электронной обработки сигналов; РС — компьютер
= 20 мкм, мощностью излучения 0.5 мВт. Микрообъектив 2 (10х, f = 15.5 мм, А = 0.3) фокусирует излучение источника на контролируемую поверхность объекта 4 и на опорную поверхность (зеркало 9).
В процессе измерений производится модуляция оптической разности хода О1М – О1N: в триггерном режиме — за счет изменения расстояния между оптическим щупом и поверхностью объекта (О 1 N), в сканирующем режиме — за счет сканирования опорного зеркала 9 (О 1 M). Последнее крепится на пружинном параллелограммном механизме, колебания которого возбуждаются электромагнитным модулятором 12. Сканирование опорного зеркала производится также и в триггерном режиме при введении дополнительной модуляции в опорном канале. Момент равенства оптических длин плеч интерферометра О1М и О1N соответствует максимуму контраста интерференционного поля и, следовательно, максимуму сигнала фотоприемника 6. При сканировании зеркала 9 изменение оптической длины опорного плеча интерферометра определяется с помощью пары голографических дифракционных решеток 13, одна из которых неподвижна, другая жестко связана со сканирующим зеркалом 9. Направление взаимного смещения дифракционных решеток на схеме обозначено стрелкой. Шаг решеток равен 1.5 мкм. Решетки освещаются источником 15, сигнал регистрируется фотоприемником 16. Начало отсчета определяется с помощью второго интерферометра Майкельсона, образованного светоделителем 8, зеркалом 10 и общим для двух интерферометров сканирующим зеркалом 9. Начало отсчета соответствует максимуму сигнала фотоприемника 14, который наблюдается в момент равенства длин плеч О 2 L и О 2 M. Этот сигнал является опорным: относительно него отсчитывается временнóе положение максимума информационного сигнала фотоприемника 6. Очевидно, что размер зондирующего пятна на поверхности объекта определяет амплитуду информационного сигнала. Поэтому при проведении измерений необходимо, чтобы зондирующее излучение было сфокусировано на поверхности объекта. Для выполнения этого требования в экспериментальном устройстве использовалось следующее техническое решение: пространственное положение источника 1 также модулировалось во времени вдоль оси излучения с частотой сканирования опорного зеркала 9. При этом требование фокусировки излучения на поверхности объекта выполнялось при соотношении амплитуд сканирования источника и опорного зеркала 1 : 60. Основанием для определения этого соотношения являлись расстояние до объекта (120 мм) и фокусное расстояние микрообъектива 2 (15.5 мм).
КИС позволяет измерять относительную величину расстояния до объекта: расстояние до объекта отсчитывается от некоторой базовой плоскости, соответствующей временнóму положению максимума опорного сигнала фотоприемника 14. Искомая информация содержится во временнóм интервале между максимумами сигналов фотоприемников 6 и 14. Указанный временнóй интервал находится путем подсчета импульсов фотоприемника 16 при сканировании дифракционных решеток 13.
Для получения искомой информации о рельефе поверхности сигналы фотоприемников 6, 14 и 16 подвергаются аналоговой и цифровой обработкам. Ниже рассматриваются алгоритмы обработки сигнала по двум методам: методу дифференцирования огибающей и методу площадей.
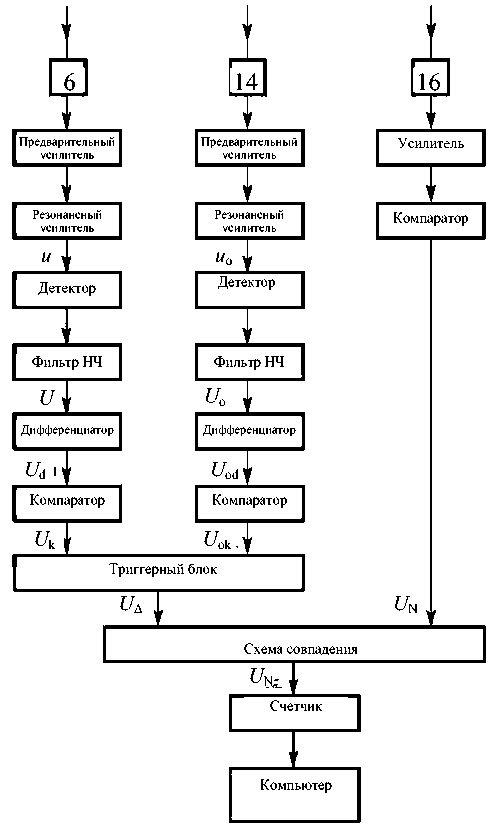
Рис. 2. Блок-схема оптико-электронной компьютерной обработки
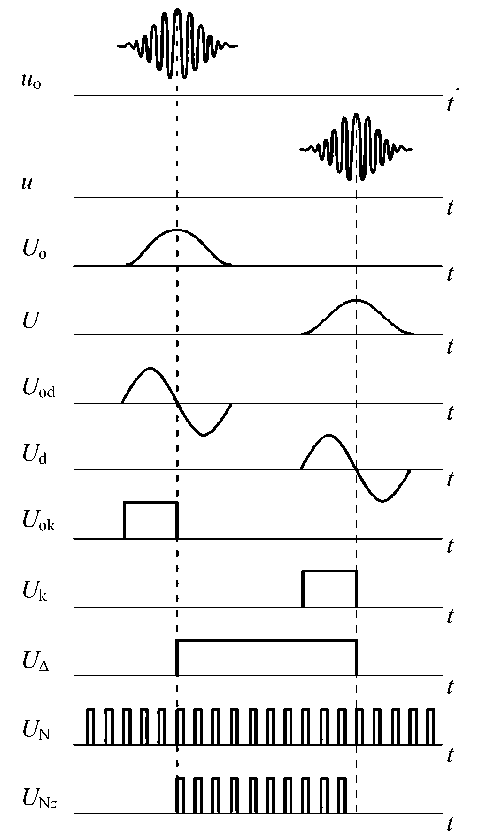
Рис. 3. Оптико-электронная компьютерная обработка интерференционного сигнала методом дифференцирования огибающей
обработки и соответствующие сигналы показаны на рис. 2 и 3. Сигналы фотоприемников 6 и 14 проходят по двум идентичным каналам. В усилительном каскаде производится предварительное усиление сигнала и резонансное усиление на доплеровской частоте [3–8], определяемой выражением
2v f c = 2 v , (1)
λ где v — скорость сканирования опорного зеркала на линейном участке; λ — длина волны излучения.
После детектирования и фильтрации нижних частот происходит формирование огибающих U и U o информационного и опорного сигналов ( u и u o соответственно). Продифференцированные сигналы U d и U od подаются на компараторы. С выходов компараторов снимаются прямоугольные импульсы U k и U ok , задние фронты которых соответствуют положениям максимумов огибающих сигналов U и U o . По задним фронтам сигналов U k и U ok триггерный блок формирует меандр U Δ, длительность которого равна временнóму интервалу между опорным и информационным сигналами. Меандр U Δ подается на схему совпадения, на которую одновременно подаются импульсы U N с фотоприемника 16 после усиления и преобразования. С выхода схемы совпадения снимается гребенка импульсов U N z , количество которых определяется шириной временных ворот U ^ . Окончательно информация о расстоянии до поверхности
Математическое моделирование интерференционного сигнала проводилось при следующих параметрах системы: скорость перемещения опорного зеркала v = 400 мм/с, длительность выходного сигнала по уровню 0.1 τ = 50 мкс, размер зондирующего пятна на поверхности d = = 30 мкм, диапазон измерений h = 3.8 мм, погрешность измерений Δ = 1 мкм.
АЛГОРИТМ ОБРАБОТКИ ИНТЕРФЕРЕНЦИОННОГО СИГНАЛА ПО МЕТОДУ ДИФФЕРЕНЦИРОВАНИЯ ОГИБАЮЩЕЙ
Блок-схема оптико-электронной компьютерной
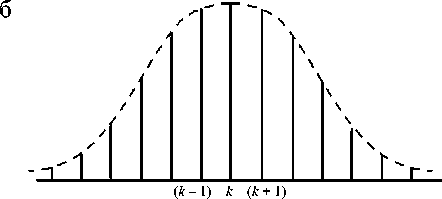
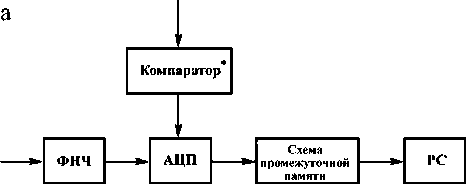
Рис. 4. Оптико-электронная компьютерная обработка интерференционного сигнала методом площадей.
а — блок-схема электронной обработки; б — формирование выборок огибающей сигнала; k -я выборка делит площадь под огибающей на две равные части
объекта Δ z выводится на дисплее компьютера
V- = N^ , (2)
где N z — количество импульсов U N z ; h d — шаг дифракционных решеток (1.5 мкм).
АЛГОРИТМ ОБРАБОТКИ ИНТЕРФЕРЕНЦИОННОГО СИГНАЛА ПО МЕТОДУ ПЛОЩАДЕЙ
В этом случае огибающая интерференционного сигнала U подается на вход аналого-цифрового преобразователя (рис. 4). Тактовая частота задается импульсами UN. Компьютер производит суммирование выборок сигнала Ub. Поскольку интервал между выборками постоянный, сумма выборок Sb пропорциональна площади под огибающей. Далее сумма Sb делится на 2 и находится величина Sb /2. После этого производится последовательное сложение выборок, начиная с первой, и вычисляется k сумма IUb (i) [5-9]. При этом каждый раз при i=1
увеличении суммы на одну выборку получаемая сумма сравнивается с величиной Sb /2, соответствующей половине площади под огибающей. Суммирование прекращается, когда после добавления k-й выборки наступает равенство
k
I U b = S b /2.
i = 1
Временнóе положение k -й выборки принимается в качестве положения максимума информационного сигнала. Дальнейшее определение времен-нóго интервала U Δ производится так же, как в методе дифференцирования огибающей.
Управление работой КИС осуществляется с помощью схемы синхронизации (рис. 5). С выхода датчика измерения скорости сканирования опорного зеркала v снимается синусоидальный сигнал U v , который подается на компаратор. Последний формирует прямоугольные импульсы U vо , длительность которых равна временнóму интервалу между моментами нулевой скорости сканирования опорного зеркала. По передним
а
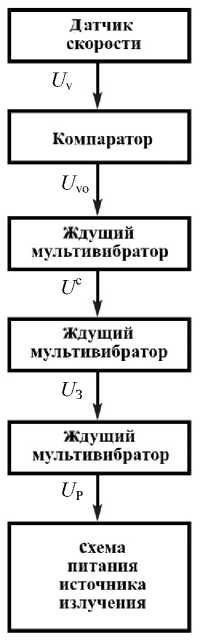
б
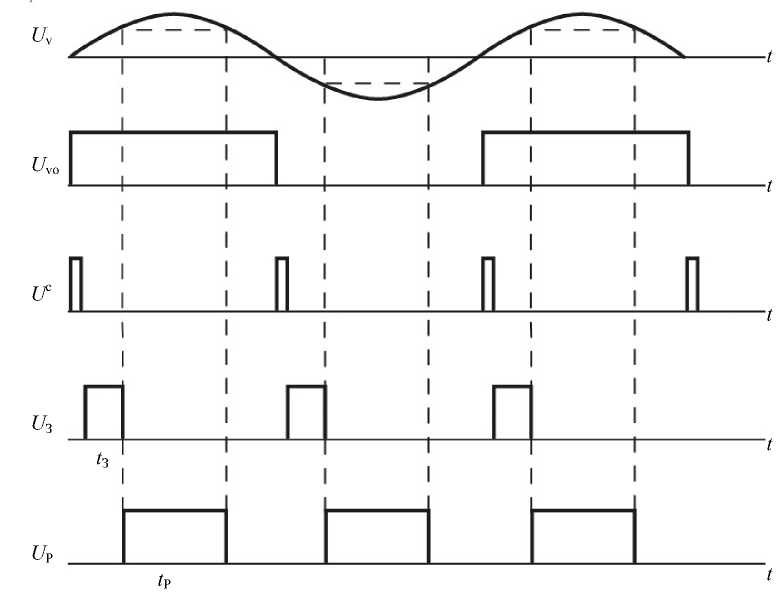
Рис. 5. Блок-схема синхронизации (а) и формирование сигналов управления (б)
и задним фронтам импульсов U vо формируются синхроимпульсы U c, которые запускают схему формирования импульсов задержки U З . По задним фронтам импульсов задержки вырабатывается прямоугольный импульс U Р, который является разрешающим сигналом на подачу напряжения питания U П источника освещения 1 (рис. 1).
Формирование импульсов задержки необходимо для того, чтобы из графика зависимости скорости сканирования от времени ( U v ) выделить участки с максимальной скоростью, и на которых v ≈ const. Постоянство скорости сканирования опорного зеркала v в свою очередь обеспечивает постоянство частоты сигнала fc (1). Длительности t З , t Р импульса задержки U З и меандра U Р определяются периодом сканирования. При экспериментальных исследованиях t З и t Р равнялись Т М /8 и Т М /4 соответственно, где Т М — период сканирования.
ЗАКЛЮЧЕНИЕ
В работе рассмотрена возможность применения КИС для исследования негладких поверхностей, а также показана актуальность использования этих систем. Приведены алгоритмы обработки интерференционного сигнала по методу площадей и дифференцирования огибающей. Измеряемое расстояние до поверхности объекта определяется простым выражением A z = N z h d . Наглядно продемонстрирована оптико-электронная обработка интерференционного сигнала представленными методами.
Список литературы Алгоритмы обработки информационного сигнала компьютерной интерференционной системы контроля негладких поверхностей
- Майоров Е.Е., Прокопенко В.Т. Интерферометрия диффузно отражающих объектов. СПб.: Издат. НИУ ИТМО, 2014. 193 с.
- Майоров Е.Е., Прокопенко В.Т. Исследование влияния спекл-структуры на формирование интерференционного сигнала и погрешность измерений//Научное приборостроение. 2013. Т. 23, № 2. С. 38-46.
- Майоров Е.Е. Метод устранения влияния декорреляции спекл-полей на точность измерений и динамический диапазон интерференционного сигнала//Научное обозрение. 2013. № 9. С. 329-332.
- Майоров Е.Е., Прокопенко В.Т., Ушверидзе Л.А. Оптимизация динамических параметров оптического щупа триггерного типа//Научно-технический вестник информационных технологий, механики и оптики. 2012. T. 78, № 2. С. 13-16.
- Майоров Е.Е., Машек А.Ч., Прокопенко В.Т., Чистякова Н.Я. Исследование метрологических характеристик измерительной оптико-механической головки//Изв. вузов. Приборостроение. 2012. Т. 55, № 7. С. 59-65.
- Майоров Е.Е., Прокопенко В.Т., Ушверидзе Л.А. Расчет параметров сканирования интерферометрической системы контроля формы диффузно отражающих объектов//Приборы. 2012. № 7. С. 23-25.
- Майоров Е.Е., Машек А.Ч., Прокопенко В.Т., Хайдаров Г.Г. Применение поперечно-сдвиговой интерферометрии в голографической интерферометрии для контроля диффузно отражающих объектов//Вестник Санкт-Петербургского университета. Серия 4: Физика, химия. 2012. Вып. 4. C. 31-35.
- Майоров Е.Е., Прокопенко В.Т. Применение двухчастотного излучения для реализации принципов гетеродинной голографической интерферометрии с одним опорным пучком//Известия высших учебных заведений. Приборостроение. 2012. Т. 55, № 12. С. 43-45.
- Майоров Е.Е., Прокопенко В.Т., Шерстобитова А.С. Исследование оптико-электронной системы расшифровки голографических интерферограмм//Оптический журнал. 2013. Т. 80, № 3. С. 47-51.
