Аналитический расчет алгоритма обезвешивания для активной системы компенсации веса

Автор: В. Н. Максимов, Н. В. Матюха, П. Н. Максимов, К. В. Кондратьев
Журнал: Космические аппараты и технологии.
Рубрика: Ракетно-космическая техника
Статья в выпуске: 1, 2026 года.
Бесплатный доступ
В статье изложены результаты аналитического расчёта и разработки алгоритма управления активной электромагнитной системой компенсации веса, предназначенной для проведения модальных испытаний крупногабаритных слабодемпфированных конструкций космических аппаратов. Подробно описаны принцип действия системы, её конструктивная схема, включающая неподвижные элементы (стальной корпус, постоянный магнит, стальной диск, энкодер, аэростатический подшипник) и подвижные компоненты (медная катушка, шток, измерительная линейка), а также математическая модель динамики на основе законов физики. Предложен оригинальный алгоритм формирования управляющего сигнала в виде кода цифро-аналогового преобразователя, основанный на калибровочной зависимости от текущей координаты подвижного элемента. Этот подход обеспечивает одновременную точную компенсацию гравитационной силы, формирование заданной возвращающей жёсткости (эффект «электропружины») и генерацию синусоидального возбуждающего воздействия с требуемыми амплитудой и частотой. Особое внимание уделено проблеме паразитной вязкости, возникающей при использовании источника напряжения из-за индуцированной ЭДС. Разработанный специализированный усилитель тока полностью устраняет данный эффект, гарантируя прямую пропорциональность возбуждающей силы задаваемому сигналу без искажений. Экспериментальные испытания подтвердили высокую эффективность предложенных решений: погрешность воспроизведения вибровозбуждающей силы не превысила ±5,5 % по амплитуде. Полученные результаты свидетельствуют о готовности системы к практическому применению для наземного моделирования условий невесомости при отработке аэрокосмической техники.
Электромагнитная система компенсации веса, модальные испытания аэрокосмической техники, алгоритм обезвешивания, усилитель тока, искусственная невесомость, гравитационная разгрузка
Короткий адрес: https://sciup.org/14135750
IDR: 14135750 | УДК: 629.78 | DOI: 10.26732/j.st.2026.1.01
Analytical calculation of the de-weighing algorithm for an active weight compensation system
The article presents the results of analytical calculation and development of the control algorithm for the active electromagnetic weight compensation system, which is intended for conducting modal tests of large-scale weakly damped spacecraft structures. The article provides a detailed description of the system's operation principle, its design scheme, which includes fixed elements (a steel housing, a permanent magnet, a steel disk, an encoder, and an aerostatic bearing) and movable components (a copper coil, a rod, and a measuring ruler), as well as a mathematical model of dynamics based on the laws of physics. An original algorithm for generating a control signal in the form of a digital-to-analog converter code based on a calibration dependence on the current coordinate of the movable element is proposed. This approach provides simultaneous precise compensation of the gravitational force, the formation of a specified return stiffness (the «electro-spring» effect), and the generation of a sinusoidal excitation signal with the required amplitude and frequency. Special attention is paid to the problem of parasitic viscosity that occurs when using a voltage source due to induced electromotive force. The developed specialized current amplifier completely eliminates this effect, ensuring that the excitation force is directly proportional to the specified signal without distortion. Experimental tests have confirmed the high efficiency of the proposed solutions, with an error in reproducing the vibration excitation force of no more than ±5.5 % in amplitude. These results demonstrate that the system is ready for practical use in ground-based simulations of weightlessness conditions for the development of aerospace technology.
Текст статьи Аналитический расчет алгоритма обезвешивания для активной системы компенсации веса
В современной практике верификации конечно-элементных моделей аэрокосмических конструкций широкое применение нашли модальные испытания [1–4]. Данный метод позволяет получить экспериментальные динамические характеристики объекта, что служит надёжной основой для сопоставления с результатами численного моделирования.
Для обеспечения максимальной достоверности результатов модальных испытаний [5–7] требуется воспроизведение условий, близких к реальным эксплуатационным. В контексте космической техники доминирующим фактором является состояние невесомости. На наземных стендах это достигается посредством специализированных систем гравитационной разгрузки (обезвешива-ния) [8–11], которые частично или полностью компенсируют действие силы тяжести на испытуемый объект.
Наиболее перспективными в этом классе устройств признаны активные системы обезве-шивания. Они представляют собой сложные механические комплексы, оснащённые датчиками и исполнительными элементами, функционирующими в замкнутом контуре управления. Основная функция таких систем заключается в динамической компенсации гравитационных сил в реальном времени, тем самым создавая условия искусственной невесомости.
Особый научный и инженерный интерес представляют электромагнитные системы обезвешива-ния. За счёт генерации сильного магнитного поля они обеспечивают существенные компенсирующие усилия при относительно низком энергопотреблении [12; 13]. Это позволяет минимизировать габаритно-массовые характеристики оборудования, повысить его мобильность и технологичность интеграции в испытательные комплексы.
Разработанная активная электромагнитная система компенсации веса включает неподвижные и подвижные компоненты. Неподвижная часть состоит из стального корпуса (1), постоянного магнита (2), стального диска (4), энкодера (7) и аэростатического подшипника (5). Подвижный узел образован медной катушкой (3), штоком (6) и измерительной линейкой (8). Конструктивная схема системы приведена на рисунке 1.
Медная катушка подключена к управляемому источнику питания. При протекании электрического тока в обмотке в соответствии с законом Ампера возникает электродинамическая сила, вызывающая поступательное перемещение катушки по вертикальной оси. Величина и направление силы определяются амплитудой и полярностью тока, что обеспечивает прецизионное управление положением подвижного элемента [14].
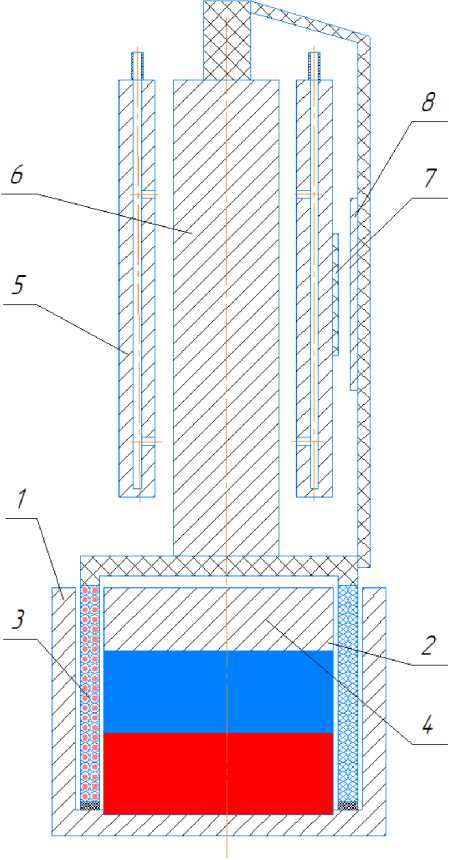
Рисунок 1. Активная система компенсации веса
Состояние динамического равновесия реализуется при точной компенсации электродинамической силой гравитационного воздействия на подвижный узел, приводя к устойчивой левитации последнего и тем самым к адекватному моделированию условий невесомости.
С целью минимизации паразитного механического трения, приводящего к дополнительным диссипативным потерям и снижению точности эксперимента, в конструкции применён аэростатический подшипник [15]. Его работа основана на формировании газовой прослойки, обеспечивающей бесконтактное взаимодействие поверхностей. Имитационная модель данной системы была смоделирована в MATLAB Simulink [16]. На данный момент стоит задача по разработке алгоритма управления данной системой.
1. Алгоритм управления системой компенсации веса
Напряжение в катушке описывается вторым законом Кирхгофа:
KU = RI + B • l • dx + dLxH, у dt dt где U – напряжение в цепи, R – сопротивление обмотки, токоизмерительного резистора, проводов, и выходное сопротивление усилителя, I – сила тока в цепи, l – средняя намотки соленоида, В – магнитная индукция постоянного магнита, L – индукция катушки, Kу – коэффициент усиления усилителя.
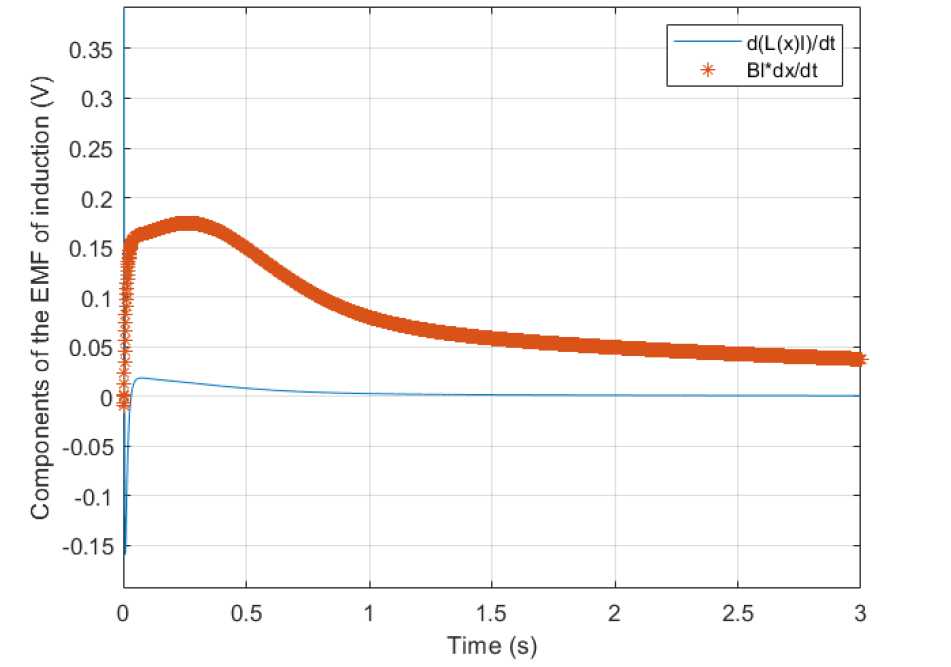
Тем самым ЭДС индукци и им еет две составляющие:
D 1 dx d ( L ( x ) I )
3 B * l • 1 . dt dt
Повторно было пр ои зведено моделирование ЭДС индукции в MA T LA B Simuli n k, результаты которого представлены на р исунке 2.
d (L (x) I)
Элемент-----мал относительно B • l--, dtdt поэтому им можно пренебречь при учете ЭДС индукции:
dx
KU — RI + B • l.
у ния относительно неподвижного магнитопровода и постоянного магнита (рисунок 1). Роль магнитного сердечника соленоида выполняют постоянный магнит и расположенный над ним стальной диск.
По ст оя нный маг ни т характ еризуется относительной магнитной проницаемостью µₘ ≈ 1 (типич ное знач е ние дл я большин ства редкоземельных магни то в, таких ка к NdFeB), в то время как стальной д иск обла дает значительно более высокой пр оницае м остью µ d >> µₘ (обычно µ d составляет несколько тысяч для электротехнической стали). Важно отметит ь, что в рабочем диапазоне перемещени й ка тушки стальной диск полностью остаётся внутри её обмотки и не выходит за пределы соленоида. Вследстви е этого ко нф игурация магнитного потока, создаваем ого катушкой, независимо от её положения, остаётся практически неизменной.
Ста ль ной ко рпус расп ол агается вне области обмотки и ока зывает слабое в лияние на магнитное
Следовательно, т ок в катушке запишется как:
K y U — B ( x ) l • -I —----------dL
.
R
Уравнение движения имеет вид:
d2
—
12 dL ( x ) --------•--------------------
2 dx
поле, создаваемое соленоидом.
В результ ате перечисленны х факторо в и ндук тив н ос ть к ату шки L( x) демонс т р и р уе т к ра йне слабую зависимость от координаты x , и элементом 12 dL ( x ) ---можно пренебречь:
2 dx d2 xdx m--— — B (x) l • I — сmg dt2dt
где m – масса груза и подвижной части системы обезвешивания, c – коэффициент вязкого де м пфирования.
В процессе компенсации веса подвижная медная катушка совершает ограниченные пер ем еще-
Данное уравнение можно перезаписать в виде:
d2 x м m ^ It2 = B(x)l ^
Kу ’ U — B (x)l ^ dx dt
R
dx
— с---mg dt
If I— 0СМ1ЛМЕ АППАРАТЫ VI технологи нашиим
Том 10
Напря жение, ф о рм ир уемое цифро -а налогов ым преобразователе м (ЦА П ), должно ко м пе нсирова ть вес Up , обеспеч иват ь воз буждающе е синусоидальное возд ейс тв ие a · s in ωt , а т акже и з- за неточности компенс аци и веса форми ро вать во звраща ю щую силу b · x . Данно е напр яжени е запишется сле ду ю щим образом:
U = U p + a ■ sin a t - b ■ x .
Уравнение движе ния з ап ишется в сле дую ще м виде:
d2 x ( B 2( x) l2 ^ dx B (x) l _ mdt2 +| c + R I dt + R y ■ x =
Коэффициент жёсткости запишется как:
, R 2 B(x0) U b =--------m • a = v 07 0 Uo.
K y B ( x ) l 0 B ( x ) g 0
Тогда напряжение, формируемое ЦАП, имеет вид:
B ( x ) l B ( x) I
=----- KUn - mg +----- Kva • sin a t .
Rуp Rу
Условие компе нс ац и и веса с учёт ом к алибров ки запишетс я та к:
B ( x ) l
R
K y U p = mg .
U = Bx ) U 0 + Bx o ) . F U 0 .
B ( x ) B ( x ) mg
■ B ( x 0) ® orr
■ s’" * - B ( x ) g »• x *
Что можно перезаписать как:
TT_ B(x0) Fs •, *■
U - U0 ■ (1 +--sin*t
B(x) mgg
Калибровка производится установкой какого-либо груза последовательно в положения с различными значениями координаты x и запоминанием напряжения uc , удерживающего груз в этих положениях. Это напряжение соответствует условию компенсации веса:
Напряже ние об езве ш ивания выра зитс я как:
mgR p = u^ •
mgR uc (x) - VBx)
*
Причём в началь ной точке x 0 и при отсу тствии синусоидал ьно го воз бу жден и я, ко гд а иде т процесс удержания о пре деленно й масс ы, н апр яжен ие запишется как:
Как видно, uc ( x ) зависит от массы груза, коэффициента усиления усилителя, сопротивления, но отношение
U = mg R
0 K ■B ( x o ) l
.
При этом отношение сопротивл ения к коэффициенту усиления запишется как:
R _B ( x o ) lTT
Ky- mg U 0 .
О тку да напряжения обезвешивания можно выразить в виде:
Uc (x1) B(x2) = Ц~^’ uc (x J B (U являющееся характеристикой взаимодействия тока с магнитом, зависит только от координат и может использоваться с любыми грузами и любыми установленными значениями коэффициента усиления усилителя.
Таким образом, ЦАП должен выдавать напряжен ие, за вис ящее от времени и текущей координаты:
U - B ( x o\/
U p U o ’
B ( x )
Амплитуда синусоидальной силы:
Откуда амплит уда синусоидального напряжения найдется как:
a =-- R--F = Bx) • —U .
K y • B ( x ) l s B ( x ) mg 0
Коэффициент жёсткости электропружины:
U (t, x) - Mx! U0. (1 + F. sin at - ^.x), uc(x°) mg g причём величина U0 = U(x0) определяется при взвешивании груза (фиксации в точке с координатой x0). Для удобства введём функцию:
f ( t , x ) - 1 + F ■ sin a t - *- ■ x .
mg
g
Kb
^B(x)l = m • °, где ω0 = 2πf0 – желаемая собственная частота осциллятора.
На самом деле алгоритм у прав ле ния р аботает не с напряжениями, а с к одами ЦАП, в то м чис ле и при калибровке определяетс я н е функция uc ( x ), а фу нкци я dc ( x ), представляющая собой з ависимость кодов ЦАП от координаты.
Напряжение U на выходе Ц АП связано с его кодом D следую щим выражением:
U ( x ) = U + ( U . - U m) ■ Dx ) ,
где U min – мин им ально е напряжение ЦАП, U max – максимальное напряжение ЦАП.
Напряжение при удержании зап ишется как:
D ( Х П)
U 0 = U ( x 0 ) = U min + (U max - U min ) - ^ '
А соотношение напряжений будет иметь вид:
U c ( X ) 4095 • U min + (U max - U min ) ’ ^ c ( x )
--------=--------------------------------------------.
U c ( X 0 ) 4095 • U min + ( U max - U min ) ’ d c ( X 0 )
Тогда, обозн ачив для краткости:
A U = U max
—
U mln
получим:
U ( t _ 4095 - U mm +A U - d c ( X ) ’ 4095 - U mm +A U • d c ( X 0 )
Вследствие чего уравнение движения примет виД: 2 < d x . .
m — y + c + dt I
B 2( x ) l 2 ^ dX
--------I + m a 0 - x _ F s • sin a t . (1)
R J dt
B2 ( x ) l2
Добавленная вязкость не зависит от формируемых в электрической цепи напряжений и связана только с взаимодействием тока, возбуждаемого ЭДС индукции при движении обмотки в магнитном поле, с самим этим магнитным полем. Устранить эту вязкость можно только исключив возможность возникновения индукционных токов. Для этого следует использовать источник тока (R ≈ ∞) вместо источника напряжения. Тогда в цепи обмотки будет протекать только контролируемый ток, и никакого индукционного.
D ( X o ) ) /V X
U min+A U - — - f ( t , X ).
min 4095 '
-
2. Усилитель тока
Что можно записать как :
U ■
4095 U mn + dc ( x ) .Tr A U A U
U min 4095
4095 d c ( X 0 )
, A U .
- ( 4095 U mn + D ( x )Y f ( tx )
A U J
Дополнительно обозначим:
A _ 4095 U =; A U
Был разработан источник тока, принципиальная схема которого изображена н а рисунке 3.
Операционный ус илит ель U 1A имеет отрицательную обрат ную связь с нагр у зкой R 11 и L1. Таким образом, в случае возникн о вени я ЭДС индукции в катушке и паден ия силы т ока операционный усилитель реагирует на это и компенсирует данное паде ние за счёт открывания транзисторов.
Сила тока в этой схеме зависит от входного напряжения на положительном входе операционного усилителя U 1A и от сопротивления резистора R 9. Данная зависимость описывается формулой:
A + d (x) AU 4
U ( t , X ) _---- d A x- —U- - ( A + D ( x 0)) - f ( t , X ).
A + d (x J 4095
Вырази м код ЦАП через напряжение:
4095 U ( t , X ) — U mm 4nqsU ( t , X ) D ( t , X ) _ 4095------------- _ 4095-- A .
A U A U
Подстави в U ( t , x ), по лучим:
A + d c ( x ) A U A + d c ( X o)4095
- ( A + D ( x 0 ) ) - f ( t , x )
D ( t , x ) _ 4095
A U
— A .
Окон чательно в ЦАП следует выдавать код:
D ( t , x ) _ 4+ d M - ( A + D ( X 0 ) ) - f ( t , x ) — A ,
A + d c ( X 0 )
где A = 4095 · U min / ( U max – U min ) – константа для данного Ц АП , dc ( x 0 ) – значение калибровочной функц ии в начальной точ ке, D ( x 0) – значение кода ЦАП при фиксации положения груза в начальной точке, dc ( x ) – значение калибровочной функции в текущей точке.
I _ U
R 4
Для моделировани я ЭДС индук ции в схему был вставлен элемент переменного тока (рисунок 4) с амплитудой 3 В и частотой 3 Гц.
На положительный вход операционного усилителя U 1A подавался сигнал с частотой 10 Гц, амплитудой 0,046 В и смещением 0,135 В
Результаты симуляции данной схемы представлены н а р исунке 5.
Амплитуда тока соответствует уравнению (2), в сигнале не наблюдается паразитный эффект, создаваемый ЭДС индукции, что говорит о работе усилителя тока.
Вследствие чего в уравнении (1) пропал член, отвечающий за ЭДС индукции, и теперь уравнение движения можно записать в виде:
d2 x . dx m + с + man - x _ F - sin at.
dt2 dt 0 s
И оператор напрямую может задавать амплитуду возбуждающей силы через переменную F s.
Рисунок 5. Результаты симуляции
3. Экспериментальная отработка
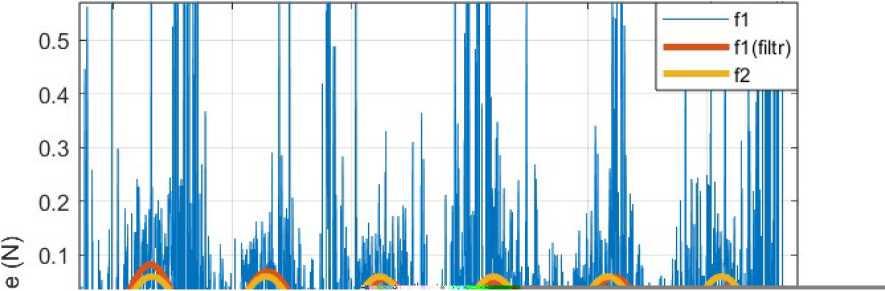
Проведён эксперимент по отработке системы, в ходе которого оператор задавал амплитуду и частоту возбуждающей синусоидальной силы. В процессе испытания регистрировался ток в катушке, а по его значению рассчитывалась реализованная электродинамическая сила. Сопоставление заданной и полученной сил позволило оценить точность работы разработанного усилителя тока, а также корректность реализованного алгоритма управления. Результат приведен на рисунке 6.
На графике показаны три кривые: f2 – заданная оператором сила; f1 – сила, рассчитанная по измеренному току; f1(filtr) – отфильтрованная кривая f1. Анализ показывает высокое совпадение заданной и реализованной сил. Погрешность воспроизведения амплитуды составила ±0,0023 Н, что соответствует относительной ошибке ±5,5 % при заданной амплитуде. Указанная погрешность преимущественно связана с наличием артефактов в расчётной силе по току, которые появляются после фильтрации сигнала. Полученные данные подтверждают высокую точность усилителя тока и адекватность разработанного алгоритма управления.
Заключение
Предложен аналитический подход к формированию алгоритма управления, основанный на точном учёте зависимости управляющего параметра (кода ЦАП) от текущей координаты подвижного элемента. Ключевым достижением стало математическое обоснование функции управления, позволяющей одновременно обеспечивать компенсацию гравитационной силы, создание заданной возвращающей жёсткости («электропружины») и возбуждение синусоидального воздействия требуемой амплитуды и частоты.
Анализ динамики системы показал, что ис- пользование источника напряжения приводит к появлению нежелательной дополнительной вязкости, обусловленной взаимодействием индуцированной ЭДС с магнитным полем. Разработанный специализированный усилитель тока полностью устраняет этот эффект, обеспечивая прямую про-
Том 10
порциональность возбуждающей силы задаваемому сигналу без паразитных искажений.
Проведённое моделирование и экспериментальное исследование подтвердили высокую точность реализованного алгоритма: погрешность воспроизведения возбуждающей силы не превысила ±5,5 % по амплитуде. Полученные данные свидетельствуют о готовности системы к практическому применению при наземной отработке крупногабаритных слабодемпфированных конструкций космической техники.
Перспективными направлениями дальнейшего развития являются: повышение диапазона компенсируемых масс, а также интеграция системы в многокоординатные стенды обезвешивания для испытаний сложных пространственных конструкций. Реализация предложенных решений позволит существенно повысить достоверность модальных испытаний и, как следствие, надёжность разрабатываемых космических аппаратов.
Список литературы Аналитический расчет алгоритма обезвешивания для активной системы компенсации веса
- Колышев Е. С., Крапивко А. В. Экспериментальные методы определения динамических характеристик опор шасси самолета // Вестник Московского авиационного института. 2019. Т. 26. № 4. С. 66–80. doi: 10.34759/vst-2019–4–66–80.
- Бернс В. А., Жуков Е. П., Лакиза П. А., Душухин Д. О., Шкода А. В., Райс К. Ю. Опыт диагностики авиационных конструкций в процессе вибрационных испытаний // Вестник Московского авиационного института. 2024. Т. 31. № 4. С. 113–122.
- Пронин М. А., Рябыкина Р. В., Смыслов В. И. Экспериментальное исследование вынужденных колебаний самолета при отрыве лопатки двигателя // Вестник Московского авиационного института. 2019. Т. 26. № 2. С. 51–60.
- Парафесь С. Г. О корректировании расчетной динамической схемы беспилотного летательного аппарата по результатам наземных модальных испытаний в задачах аэроупругости // Научный вестник Московского государственного технического университета гражданской авиации. 2022. Т. 25. № 3. С. 73–85.
- Бернс В. А., Жуков Е. П., Маринин Д. А., Маленкова В. В. Экспериментальный модальный анализ летательных аппаратов на основе монофазных колебаний // Известия Самарского научного центра РАН. 2018. Т. 20. № 4. С. 43–54.
- Глазков И. Е., Филипов А. Г. Модальный анализ космической головной части совместно с головным обтекателем // Инновации. Наука. Образование. 2021. № 25. С. 590–597.
- Агеев П. О., Агеева Д. И. Модальный анализ криоэкрана телескопа космической обсерватории «Миллиметрон» // Актуальные проблемы авиации и космонавтики. 2016. Т. 1. № 12. С. 57–59.
- Иванов А. В., Зоммер С. А. Анализ процесса раскрытия зонтичного рефлектора на стенде с активной системой обезвешивания // Космические аппараты и технологии. 2021. Т. 5. № 4 (38). С. 208–216. doi: 10.26732/j.st.2021.4.04.
- Беляев А. С., Филипас А. А., Курганов В. В., Поберезкин Н. И. Четырехтросовая система обезвешивания с управлением по вектору силы // Электротехнические и информационные комплексы и системы. 2022. Т. 18. № 2. С. 98–106. doi: 10.17122/1999–5458–2022–18–2–98–106.
- Гайдукова А. О., Белянин Н. А. Обзор систем обезвешивания // Материалы науч.-практ. конф. «Решетнёвские чтения». 2016. Т. 1. С. 93–95.
- Schulte Wethof B., Maas J. Design of an Electromagnetic Linear Drive with Permanent Magnetic Weight Compensation // Actuators. 2024. vol. 13. no. 3. P. 107. doi: 10.3390/act13030107.
- Janssen J. L. G., Paulides J. J. H., Lomonova E. A., Delinchant B., Yonnet J. P. Design study on a magnetic gravity compensator with unequal magnet arrays // Mechatronics. 2013. vol. 23. P. 197–203.
- Pechhacker A., Wertjanz D., Csencsics E., Schitter G. Integrated electromagnetic actuator with adaptable zero power gravity compensation // IEEE Transactions on Industrial Electronics. 2024. vol. 71. no. 5. pp. 5055–5062. doi: 10.1109/TIE.2023.3288176.
- Максимов В. Н., Максимов П. Н., Кондратьев К. В. Электромагнитная система компенсации веса // Космические аппараты и технологии. 2025. Т. 9. № 4 (54). С. 240–249.
- Максимов В. Н., Маринин Д. А., Максимов П. Н., Назарько А. В. Разработка линейного подшипника оборудования для модальных испытаний низкочастотных слабо демпфированных конструкций космических аппаратов // Динамика и виброакустика. 2024. Т. 10. № 2. С. 59–69. doi: 10.18287/2409–4579–2024–10–2–59–69.
- Максимов В. Н., Кондратьев К. В., Матюха Н. В., Максимов П. Н. Построение имитационной модели системы обезвешивания с использованием среды MATLAB Simulink // Труды МАИ. 2025. № 140.
- Максимов В. Н., Кондратьев К. В., Максимов П. Н. Активная система компенсации веса // Вестник Московского авиационного института. 2025. Т. 32. № 1. С. 145–152.
- Brezak D., Kovac A., Firak M. Matlab/Simulink simulation of low-pressure PEM electrolyzer stack // International Journal of Hydrogen Energy. 2023. vol. 48. no. 16. pp. 6158–6173. doi: 10.1016/j.ijhydene.2022.03.092.
- Taha Z., Aydin K., Arafah D., Sughayyer M. Comparative simulation analysis of electric vehicle powertrains with different configurations using AVL Cruise and MATLAB Simulink // New Energy Exploitation and Application. 2024. vol. 3. no. 1. pp. 171–184. doi: 10.54963/neea.v3i1.276.
- Naz F. Closed loop buck & boost converter mathematical modeling, analysis and simulation using MATLAB // International Journal of Engineering and Advanced Technology (IJEAT). 2021. vol. 10. no. 4. pp. 263–271. doi: 10.35940/ijeat.D2525.0410421.
