Аналитическое определение места судна по двум измеренным расстояниям от навигационных ориентиров с помощью лазерных дальномеров (прямая засечка)
")
Автор: Санаев А.И., Пасечников М.А.
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Статья в выпуске: 1 т.6, 2003 года.
Бесплатный доступ
Рассматриваются две схемы аналитического определения места судна (ОМС) по двум измеренным расстояниям от навигационных ориентиров с помощью лазерных дальномеров (прямая засечка). Данные схемы позволяют контролировать получение обсервованных мест с помощью электронных карт, также они применяются для проводки судов в узкостях.
Короткий адрес: https://sciup.org/14293532
IDR: 14293532
Текст научной статьи Аналитическое определение места судна по двум измеренным расстояниям от навигационных ориентиров с помощью лазерных дальномеров (прямая засечка)
-
1. Введение
-
2. Два пути решения задачи
При производстве прибрежного промера и при тралении используется для определения места судна прямая засечка. Так как в настоящее время на вооружении гидрографов имеются лазерные дальномеры, то для аналитического определения места судна по двум измеренным расстояниям с навигационных ориентиров предлагается следующая схема расчета, выполненная на сфере (рис. 1).
Выбраны два навигационных ориентира А и В, на них находятся наблюдатели с лазерным дальномерами, которые одновременно измерили расстояние ДA и ДB, а на судне установлен лазерный отражатель. Если ориентиры А и В находятся в прямой видимости, то между ними измеряется расстояние с помощью лазерного дальномера, если нет видимости между знаками, то, имея точные координаты ориентиров А(ϕА, λА) и В(ϕВ, λВ), аналитически рассчитывается расстояние между ними (в градусной мере) по формуле sin2(S/2) = sin2((ϕB - ϕA)/2) + cosϕB⋅cosϕA⋅sin2((λB - λA)/2). (1)
Также предварительно рассчитываются направления с точки А на В и наоборот с точки В на А (рис. 1). Эти направления К А-В и К В-А определяются по формулам:
tg K A-B = sin( λ B - λ A )/(tg ϕ B ⋅ cos ϕ A - sin ϕ A ⋅ cos( λ B - λ A ),
tg K B-A = sin( λ B - λ A )/(sin ϕ B ⋅ cos( λ B - λ A ) - tg ϕ A ⋅ cos ϕ B ).
После этих предварительных вычислений, которые можно выполнить заранее, имея выбранные навигационные ориентиры, рассматриваем сферический треугольник АСВ, в котором три стороны известны.
Этих данных достаточно, чтобы рассчитать полупериметр треугольника Р , а также углы А и В по формулам:
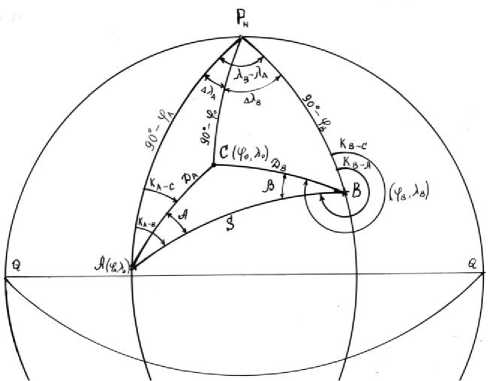
Рис. 1. Аналитическое определение места судна по двум измеренным расстояниям от навигационных ориентиров А и В
Санаев А.И., Пасечников М.А. Аналитическое определение места судна...
Р = (ДА + ДВ + S)/2,(4)
sin2(A/2) = (sin(P - ДА)⋅sin(P - S))/(sinДА⋅sinS),(5)
-
sin2(B/2) = (sin(P - ДB)⋅sin(P - S))/(sinДB⋅sinS).(6)
После вышеуказанных вычислений можно определить направления К А-С , К В-С (ортодромические пеленги) с навигационных ориентиров А и В на точку С (судно). Они определяются по формулам:
КА-С = КА-В - А,(7)
КВ-С = КВ-А + В.(8)
Следовательно, имеются ортодромические пеленги КА-С и КВ-С на точку С , а также измеренные расстояния ДА и ДВ .
По этим данным на навигационном ориентире А , используя сферический треугольник АРNС , направление КА-С и расстояние ДА , рассчитываются обсервованные координаты точки С (судна) по формулам:
sinϕ1 = sinϕA⋅cosДА + сosϕA⋅sinДА⋅cosKA-C, tgΔλ1 = (tgДА⋅sinKA-C)/(cosϕA - tgДA⋅sinϕA⋅cosKA-C), (9)
λ 1 = λ A + Δλ 1.
Аналогично на точке В из сферического треугольника СР N В по К В-С и расстоянию Д В рассчитываются обсервованные координаты ϕ 2, λ 2 той же точки С (судна) по формулам:
sin ϕ 2 = sin ϕ В ⋅ сos Д В + cos ϕ B ⋅ cos Д В ⋅ сos К B-C ,
-
tg Δλ 2 = (tg Д B ⋅ sin K B-C )/(cos ϕ B - tg Д B ⋅ sin ϕ B ⋅ cos K B-C ), (10)
λ 2 = λ В + Δλ 2 .
Окончательные координаты принимаются как среднее значение, полученное при решении этих двух сферических треугольников
ϕ 0 = ( ϕ 1 + ϕ 2 )/2, λ 0 = ( λ 1 + λ 2 )/2. (11)
В данной схеме вычисления угол пересечения изолиний Θ не играет никакой роли, т.к. исходными данными для вычисления координат являются ортодромический пеленг и расстояние. А эти изолинии пересекаются под прямым углом. Кроме того, по этой же схеме можно определить место судна в любой точке относительно навигационных ориентиров, а также на базе и продолжении базы.
Представляет интерес и другая схема вычислений. Если с ориентиров А и В измерены расстояния ДА и ДВ до точки С (судна), то можно взять разность расстояний Δ Д = ДА - ДВ и получим изолинию - сферическую гиперболу. Если взять сумму расстояний Σ Д = Д А + Д В , то изолинией будет софокусный сферический эллипс. Вышеприведенные изолинии пересекаются под прямым углом. Если расстояния Д А и ДВ измерены с погрешностью ± m Д , то разность и сумма расстояний будет иметь погрешность √ 2 m Д , т.е. точность определения места судна будет ниже, чем при использовании первой схемы.
Уравнения сферической гиперболы и софокусного сферического эллипса в прямоугольной сферической системе координат имеют вид tg2Х/a - tg2У/b = 1, tg2Х/a1 + tg2У/b1 = 1, (12)
где Х и У - прямоугольные сферические координаты; а , в - параметры гиперболы; а 1, в 1 - параметры эллипса.
Начало сферических прямоугольных координат берется в середине базы А , В . Ось Х - вдоль базы, а У - по нормали из середины базы. Решая систему уравнений (12), находим Х и У . От прямоугольных координат Х и У переходим в географические координаты, используя формулы сферической тригонометрии. Отметим, что данную схему использовать для определения места судна на базе и на продолжении базы не рекомендуется.
3. Заключение
Приведенные выше схемы позволяют контролировать и сравнивать определение места судна, рассчитаннoе аналитически и с помощью электронных карт.
Кроме того, этими схемами можно воспользоваться для проводки судов в узкостях.
