Аналитико-имитационная процедура формирования структуры АСУ космических систем связи и навигации

Автор: Царев Р.Ю., Прокопенко А.В., Литошик С.В., Зеленков П.В., Брезицкая В.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 2 (48), 2013 года.
Бесплатный доступ
Представлено описание моделей и методов поддержки принятия решений при выборе пунктов управления космическими аппаратами связи и навигации, в частности, аналитико-имитационная процедура формирования базового множества пунктов управления космическими аппаратами, включающая имитационную модель отсева варианта структуры по алгоритмически заданным ограничениям на атрибуты.
Формирование структуры асу, аналитико-имитационная процедура
Короткий адрес: https://sciup.org/148177040
IDR: 148177040 | УДК: 681.34
Analytical and simulation procedure of formation of structure of ACS of space communication systems and navigation
The description of models and methods of support of decision-making is presented in article at the choice of points of communication and navigation spacecrafts control, in particular the analytical and simulation procedure of formation of the basic set of points of spacecrafts control, including imitating model of sifting of structure variants according to algorithmically set restrictions on attributes.
Текст научной статьи Аналитико-имитационная процедура формирования структуры АСУ космических систем связи и навигации
∗ Исследование выполнено при поддержке Министерства образования и науки Российской Федерации, соглашение 14.B37.21.0116 «Модели, методы и алгоритмы синтеза и управления развитием кластерных структур АСУ космических систем связи и навигации».
Современные автоматизированные системы управления, в том числе АСУ космических систем связи и навигации, представляют собой сложные системы, характеризующиеся комплексным взаимодействием элементов, рассредоточенных на значительной территории и требующих для своего развития существенных затрат ресурсов и времени [1].
Разработка структуры системы управления при создании новых или совершенствовании существующих АСУ космических систем связи и навигации требует решения таких задач, как выбор существующих или создание новых пунктов управления космическими аппаратами, определение топологической структуры системы, синтез оптимальных по составу программных и аппаратных средств, отвечающих определенным требованиям.
Однако задача формирования структуры таких АСУ, ввиду наличия неопределенности, которая обусловлена динамикой объекта управления, относится к задачам, требующим поддержки принятия решений, при которой информация преобразуется к виду, упрощающему и облегчающему принятие решений.
Анализ различных подходов к синтезу такого рода АСУ показал, что задачи формирования могут быть разбиты на две группы. К первой относятся задачи, связанные с формированием топологической структуры системы, состоящей в определении состава, территориального расположения, типа управляющих узлов и каналов связи между ними. Ко второй группе относятся проблемы распределения функций управления и технических средств между узлами системы.
Решение задач, связанных с рациональным формированием АСУ космических систем связи и навигации, требует создания методологических основ формализации элементов и комплекса в целом, методов декомпозиции системы на подсистемы, построения формализованных моделей и методов формирования АСУ, многомашинных комплексов и сетей связи.
При этом возникают проблемы рационального сочетания моделей для решения задачи синтеза оптимальной структуры АСУ космической системы связи и навигации. Подобный подход приводит к специфическим итеративным процедурам поиска рациональных вариантов комплекса с использованием оптимизационных и имитационных моделей, позволяющих в процессе формирования комплекса оценивать и отбирать необходимые пункты управления космическими аппаратами.
Все это определило актуальность исследований в области разработки моделей и методов поддержки принятия решений при выборе пунктов управления космическими аппаратами связи и навигации, в том числе разработку многоатрибутивных методов принятия решений при многоуровневом проектировании АСУ космических систем.
Разработка аналитико-имитационной процедуры формирования базового множества пунктов управления космическими аппаратами. Задачи синтеза структуры сложных систем, в том числе АСУ космических систем связи и навигации, учитывающие ди- намику функционирования элементов системы, только в простейших случаях могут быть решены аналитическими методами [2]. Использование имитационных моделей позволяет учесть на этапе анализа и синтеза структуры не только статические взаимосвязи между элементами системы, но и динамические аспекты функционирования системы. Методы имитационного моделирования позволяют проанализировать только незначительное количество вариантов изучаемой системы и выбрать среди них в определенном смысле более приемлемый.
При синтезе кластерной структуры АСУ космической системы связи и навигации необходимо обеспечить в процессе моделирования выбор не просто приемлемого, а оптимального варианта системы. Очевидно, что простым перебором вариантов такая задача эффективно не может быть решена.
Учет динамических и стохастических аспектов функционирования АСУ космических систем связи и навигации на этапах анализа и синтеза их структур приводит к необходимости совместного использования оптимизационных и имитационных моделей. Это объясняется тем, что для формализации динамических и стохастических аспектов функционирования систем для большинства практических задач могут быть использованы лишь имитационные модели.
С математической точки зрения, рассматриваемые задачи синтеза структуры АСУ космических систем связи и навигации относятся к классу задач математического программирования, в которых ряд ограничений задан не в явном виде, а алгоритмически с помощью имитационной модели.
Для синтеза структур АСУ космических систем связи и навигации авторами в рамках оптимизационно-имитационного подхода к решению задач структурного построения сложных систем разработан ряд моделей, представленных в данной работе.
Оптимизационно-имитационный подход к синтезу структур АСУ космических систем связи и навигации основан на совместном использовании в процессе поиска оптимального варианта структуры оптимизационных и имитационных моделей. Эти модели описывают как состав и взаимосвязи структурных элементов системы, так и динамические и стохастические аспекты их функционирования.
При выборе способа взаимодействия оптимизационных и имитационных моделей синтеза структуры АСУ космических систем связи и навигации возникает проблема их рационального сочетания. Это приводит к специфическим итеративным процедурам поиска рациональных вариантов структуры системы.
Модель формирования структуры АСУ космической системы связи и навигации с неаналитически заданными ограничениями. Использование имитационного моделирования при проектировании сложных систем вызвано необходимостью учета динамических и стохастических характеристик функционирования систем, что затруднено или невозможно в традиционных оптимизационных моделях синтеза структур АСУ космических систем связи и навигации.
Возникающие при этом задачи приводят к моделям, в которых критерии, подлежащие оптимизации, и накладываемые ограничения задаются неаналитически (вербально, графиками, алгоритмами, таблицами данных, полученных экспериментально и т. д.)
Решение задач такого типа применительно к системам со значительным числом варьируемых параметров исключительно сложно и на практике часто сводится к многократно повторяющимся циклам моделирования, анализа и оценки полученных данных, корректировки параметров. Такой способ решения является, однако, не только слишком длительным и непроизводительным с точки зрения затрат машинного времени, но и не всегда может привести к удовлетворительным результатам. Обосновать полученные таким образом результаты трудно, поскольку нельзя определить, в какой мере качество функционирования системы может быть еще улучшено. Поэтому задача построения математически обоснованных процедур целенаправленного перебора вариантов для их последующего улучшения и оптимизации является весьма актуальной.
Задача синтеза структуры АСУ космической системы связи и навигации может быть формализована следующим образом. Обозначим набор структурных параметров, по которым происходит оптимизация системы, вектором X , через F ( X) - значение функционала эффективности работы системы, которая реализуется при заданном наборе параметров X . Тогда задача синтеза структуры формализуется следующим образом:
extrF ( X )
при ограничениях f (X) < 0, i е I; (1)
ф ф _
f /( X ) < 0, i e I, (2) где f i ( X ) - ограничения, заданные в форме математических выражений; f i * ( X ) - ограничения, заданные алгоритмически, т. е. выполнение этих ограничений может быть проверено лишь в ходе имитационного моделирования; I , I * - множества индексов ограничений.
Рассмотрим в качестве иллюстративного примера задачу выбора и размещения вычислительных ресурсов по распределенной АСУ космической системы связи и навигации с кластерной структурой. Она является типичной и весьма сложной задачей синтеза структуры сложных систем.
Пусть заданная сеть кластеров АСУ космической системы связи и навигации представлена графом G(I, U), где I - множество узлов сети, U - множество соединяющих их дуг. Пусть в узлах графа G имеются источники, порождающие случайные потоки заявок на обслуживание с некоторой интенсивностью yi, i е I. При этом заявки, возникающие в первом узле, могут быть обслужены вычислительными ресурсами, имею- щимися в данном узле, либо направлены в другие узлы системы. Задаются некоторые правила, по которым заявки, не обслуженные в своем узле, перераспределяются между другими узлами системы. Кроме того, задаются правила работы каждого узла.
Задача заключается в таком выборе и распределении технических средств обслуживания x i по кластерам АСУ космической системы связи и навигации, чтобы минимизировать некоторый функционал F ( x 1 , .., x n ) при выполнении ограничений, наложенных на искомый вектор X = ( x 1 , ..., x n ) [3].
Ограничения на X могут задаваться простыми соот-n ношениями типа ai < xi < bi, i = 1, n, а также ^ xi < A .
i = 1
В то же время вектор Х определяет выполнение ряда специфичных требований, предъявляемых к функционированию системы. Примером может служить требование ограниченности времени обслуживания заявок некоторой величиной T или ограниченности загрузки узлов. Ясно, что принадлежность вектора X допустимому множеству может быть проверена лишь в процессе моделирования, что подчеркивает специфику подобных задач.
Обозначим через в множество вариантов кластерных структур АСУ космической системы связи и навигации, допустимых по ограничениям (1), а через в -множество вариантов кластерных структур, допустимых по неаналитическим ограничениям (2); тогда пространство допустимых вариантов структур в = в П в , где .__ ” ____ _ . _ .__ _ ____ _ ф ~
в = {X: ЯX) < 0, г = 1, n}, в = {X: f * (X) < 0, i = n, I}.
При формализации и решении разнообразных задач синтеза кластерной структуры АСУ космической системы связи и навигации в зависимости от способа задания целевой функции F ( X ) и пространства допустимых вариантов структур в могут использоваться различные модели и процедуры формирования кластерной структуры АСУ космической системы связи и навигации.
Классификация задач формирования кластерной структуры АСУ космических систем связи и навигации. Модели задач синтеза формирования кластерных структур АСУ космических систем связи и навигации в зависимости от способа задания целевой функции F ( X ) и пространства допустимых вариантов структуры в могут быть разбиты на следующие классы.
-
I. Целевая функция F и пространство в заданы аналитически ( в = в )•
-
II. Целевая функция F задана аналитически, пространство в определяется ограничениями, заданными алгоритмически ( в = в ).
-
III. Целевая функция F задана аналитически, пространство в определяется ограничениями, заданными и аналитически и алгоритмически ( в = в П в ).
-
IV. Целевая функция F задана алгоритмически, пространство задано аналитически ( в = в ).
-
V. Целевая функция F и пространство β заданы алгоритмически ( β=β ).
-
VI. Целевая функция F задана алгоритмически, пространство β определяется ограничениями, заданными алгоритмически и аналитически ( β=β ∩ β ).
В зависимости от класса модели синтеза могут быть использованы различные процедуры поиска оптимального варианта кластерной структуры АСУ космической системы связи и навигации, отличающиеся друг от друга способом генерации вариантов структуры, правилами проверки аналитически и алгоритмически заданных ограничений и способом перехода к следующему шагу:
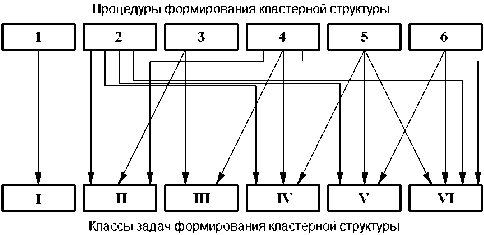
Так, процедуры, построенные по типу 1, предназначены для решения задач формирования кластерной структуры АСУ космической системы, формализованных в виде моделей класса I. Результаты решения задачи анализируются исследователями, и в случае необходимости проводится корректировка оптимизационной модели или исходных данных.
Процедуры формирования кластерной структуры АСУ космической системы связи и навигации типа 2 включают имитационные модели и используются для решения задач синтеза структуры, формализованных в виде моделей II, IV, V и VI классов.
Имитационная модель исследуемой системы представляет собой совокупность алгоритмов P , которая позволяет получить зна че ния целевой функции F , либо ограничений fi , i = 1, I , или тех и других одновременно для конкретной точки пространства допустимых вариантов структуры β . Для этого осуществляется машинный прогон имитационной модели, отображающей функционирование АСУ космической системы связи и навигации д ля фиксированного варианта структуры данной АСУ X ∈ β .
Для разработки схем формирования кластерной структуры АСУ космической системы связи и навигации могут быть использованы методы планирования имитационного эксперимента, к которым относятся различные варианты полнофакторного эксперимента, анализа поверхности отклика и др. [4].
Однако использование этих методов для формирования структуры АСУ космической системы связи и навигации существенно ограничено из-за большого расхода машинного времени при проведении необходимых прогонов имитационной модели. Так, например, при формировании топологической структуры
АСУ космической системы связи и навигации в полнофакторный план имитационного эксперимента с целью выбора оптимального варианта структуры системы должны быть включены 50 факторов, что потребовало бы 250 прогонов модели.
Поэтому используются различные методы направленного имитационного моделирования, позволяющие в ряде случаев существенно сократить перебор вариантов и уменьшить время поиска.
Для решения задач формирования кластерной структуры АСУ космической системы связи и навигации, модели которых включают аналитически заданную целевую функцию и ограничения, заданные аналитически и алгоритмически (модели классов II и III), в работах [5; 6] предложены различные специальные процедуры.
Процедуры типа 3 основаны на последовательном итеративном использовании оптимизационных и имитационных моделей и заключаются в получении с помощью оптимизационных моделей варианта структуры, экстремизирующего целевую функцию F и удовлетворяющего той части ограничений, которая задана аналитически. Затем найденный вариант структуры с помощью имитационной модели проверяется на допустимость по алгоритмически заданным ограничениям [7]. При удовлетворительном результате проверки найденный вариант считается оптимальным. Иначе проводится анализ и коррекция оптимизационной и имитационной моделей и начальных условий. Процедуры формирования кластерной структуры АСУ космической системы связи и навигации типа 3 обеспечивают нахождение рациональных вариантов структуры, где не всегда позволяют получить оптимальный вариант из-за отсутствия формальных методов коррекции моделей и данных, целенаправленно улучшающих варианты структуры в процессе формирования структуры.
Процедуры типа 4 основаны на использовании имитационных моделей совместно с оптимизационными на различных этапах поиска оптимального варианта кластерной структуры АСУ космической системы связи и навигации и могут использоваться для решения задач синтеза структуры, формализуемых в виде моделей II–IV и VI классов.
Процедуры типа 5 предусматривают включение оптимизационных блоков в имитационную модель системы с целью подбора некоторых структурных параметров АСУ космической системы связи и навигации в процессе имитации.
Процедура типа 6 является комбинацией процедур типа 4 и 5, в которой на различных этапах поиска оптимальной структуры АСУ космической системы связи и навигации совместно применяются имитационные и оптимизационные модели, при чем в имитационных моделях могут присутствовать блоки оптимизации, позволяющие найти оптимальное значение отдельных параметров АСУ.
Аналитико-имитационная процедура формирования базового множества пунктов управления космическими аппаратами. Для решения задач формирования структуры АСУ космических систем связи и навигации предлагается использовать оптимизационно- имитационный подход, основанный на совместном использовании оптимизационных и имитационных моделей в процессе поиска оптимальных вариантов структуры АСУ космической системы связи и навигации.
При создании структуры АСУ космических систем связи и навигации одной из наиболее важных задач является выбор пунктов управления космическими аппаратами. Для решения данной задачи была разработана аналитико-имитационная процедура формирования базового множества пунктов управления космическими аппаратами, которая включает нижеследующие этапы.
Этап 1. Генерация варианта структуры АСУ космической системы связи и навигации Xi .
Этап 2. Проверка допустимости варианта структуры аналитически заданным ограничениям. Если Xi ∈ β , то переход к этапу 3, иначе к этапу 1. Здесь β – множество вариантов структур АСУ космической системы связи и навигации, допустимых по аналитически заданным ограничениям.
Этап 3. Проведение машинного эксперимента с имитационной моделью системы для допустимого по аналитическим ограничениям варианта структуры X i . Данная модель отображает функционирование моделируемой системы для различных вариантов структуры. Между этапами 1 и 3 организуется информационный интерфейс для передачи данных об исследуемом варианте структуры Xi .
Этап 4. Проверка допустимости варианта структуры Xi алгоритмически заданным ограничениям.
Если Xi ∈ β , то переход к этапу 5, иначе – к этапу 1.
Здесь β – множество вариантов структур АСУ космической системы связи и навигации, допустимых по алгоритмически заданным ограничениям.
Этап 5. Запоминание варианта, успешно прошедшего этапы 3 и 4.
Этап 6. Проверка, все ли варианты структуры проанализированы. Если нет, то переход к этапу 1. В противном случае – выдача полученных результатов и окончание работы процедуры.
В зависимости от класса модели задачи синтеза и вида ее аналитической части могут быть построены различные оптимизационно-имитационные процедуры поиска оптимального варианта структуры, отличающиеся друг от друга способом генерации вариантов структуры, правилами проверки на этапах 2, 4 и 6 и способом перехода к следующей итерации [8].
При выборе кластерной структуры АСУ космических систем связи и навигации задачи формирования, учитывающие динамику функционирования элементов системы, только в простейших случаях могут быть решены аналитическими методами. Использование имитационных моделей позволяет учесть на этапе анализа и синтеза структуры не только статические взаимосвязи между элементами системы, но и динамические аспекты функционирования системы.
Необходимость в учете динамических и стохастических аспектов функционирования АСУ космическими системами связи и навигации на этапах анализа и синтеза их структур приводит совместной реализации оптимизационных и имитационных моделей.
В зависимости от класса моделей формирования структуры АСУ космической системы связи и навигации могут быть использованы различные процедуры поиска оптимального варианта структуры, отличающиеся друг от друга способом генерации вариантов структуры, правилами проверки аналитически и алгоритмически заданных ограничений и способом перехода к следующему шагу.
Выбор пунктов управления при формировании структуры АСУ космической системы представляет собой сложную комбинаторную задачу большой размерности. Для решения данной проблемы была разработана аналитико-имитационная процедура формирования базового множества пунктов управления космическими аппаратами с заданным набором атрибутов для выбора лучшего варианта формирования структуры АСУ космической системы связи и навигации, основанная на совместном использовании оптимизационных и имитационных моделей в процессе поиска оптимального варианта.
