Анализ динамических характеристик феррозондового датчика стыка свариваемых деталей

Автор: Браверман Владимир Яковлевич, Белозерцев Владимир Семенович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Технологические процессы и материалы
Статья в выпуске: 2 (23), 2009 года.
Бесплатный доступ
Приведены результаты исследований динамических свойств дифференциального феррозонда как элемента автоматической системы слежения за стыком, измеряющего составляющую магнитного поля сварочного тока, несущую информацию о положении электрода относительно стыка.
Феррозонд, спектр, добротность, передаточная функция
Короткий адрес: https://sciup.org/148175890
IDR: 148175890
Dynamic characteristics analysis of the flux gate sensor of joint welding parts
The investigation results of dynamic properties of the differential flux gate as a part of automatic tracking system, which measures the magnetic field of the welding current, with the information about the electrode position relatively to the junction are presented.
Текст научной статьи Анализ динамических характеристик феррозондового датчика стыка свариваемых деталей
В системах автоматической ориентации электрода по стыку свариваемых деталей применяются измерительные устройства с феррозондовым датчиком стыка, измеряющим информационную составляющую магнитного поля переменного тока сварочного контура [1].
Традиционно феррозонды применяются для измерения магнитных полей в статическом режиме и достаточно полно освещены в научно-технической литературе [2–4]. Динамический характер функционирования автоматических систем, использующих феррозонд в контуре управления, предполагает обеспечение соответствующих требований к его динамическим свойствам, которые в большой степени определяются характером нагрузки измерительной обмотки. Сведения, касающиеся оценки феррозонда как элемента системы управления положением электрода в условиях дуговой сварки, когда информационное магнитное поле на 1,5...2 порядка меньше поля сварочного тока, отсутствуют. Это обстоятельство обусловливает целесообразность исследования динамических характеристик феррозонда и является предметом данной статьи.
Рассмотрим работу дифференциального феррозонда [2] с выходом на второй гармонике, нагруженного на комплексное сопротивление r , L , C (см. рисунок), при воздействии измеряемого поля H ( t ), слабого по сравнению с полем возбуждения.
Сигнал H(t) моделирует четные гармоники выходной ЭДС феррозонда, поэтому при выделении второй гармо- ники напряжение на нагрузке может быть представлено в виде
u(t) = U(t)∙cos2ωt, где U(t) = G2∙H(t) – огибающая выходного амплитудно-модулированного сигнала; G2 – коэффициент преобразования феррозонда по второй гармонике; ω – частота возбуждения.
Если входной сигнал H ( t ) имеет ограниченный спектр частот 0 ≤ Ω ≤ ω , то он может быть представлен преобразованием Фурье [5]:
ω
H ( t ) = 1 H ( Ω ) ej Ω td Ω .
2π
- ω
В этом случае в огибающей несущего напряжения сохраняется полная информация о передаваемом сигнале при использовании амплитудной модуляции.
Амплитудные и фазовые частотные характеристики для огибающей выходного сигнала можно найти в предположении, что входной сигнал изменяется по следующему гармоническому закону:
H ( t ) = H ( Ω )∙cos Ω t .
Из этого соотношения видно, что огибающая выходного напряжения феррозонда изменяется по тому же закону. При этом амплитуда и фаза огибающей зависят от Ω . Таким образом,
u ( t ) = U ( Ω ) ∙ cos[ Ω t – ϕ ( Ω )]∙cos2 ω t ,
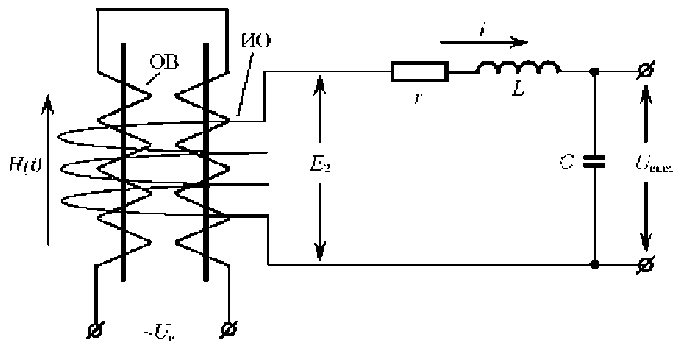
Феррозонд с нагрузкой: ИО – измерительная обмотка; ОВ – обмотка возбуждения;
Е 2 – ЭДС измерительной обмотки; ~ U в – напряжение возбуждения феррозонда частотой ω
где U ( Q ) = H ( Q ) G 2( Q ) - амплитуда огибающей; ф ( Q ) -фаза огибающей выходного сигнала.
Задача сводится к определению функций G 2( Q ) и <р( Q ), которые являются соответственно амплитудно-частотной и фазо-частотной характеристиками феррозонда для огибающей.
При гармоническом измеряемом поле ток в нагрузке феррозонда с выходом на второй гармонике содержит две составляющие с частотами (2 ю + Q ) и (2 ю - Q ) [5]:
+ 2 j [| I q , p | Sin( Ф q , p - Ф q 0 ) ] + + [| I q , - p | sin( Ф q 0 - Ф q , - p ) ] .
Запишем последнее выражение в комплексной форме и определим частотную передаточную функцию феррозонда по огибающей:
I(t) = Ц^ COS [о + Q)t + ф q,p ] +
I (j j Q)
G (jQ) = сфи 7
сф H ( j Q)
I q 0
I
+ q 2 p cos [(2ю-Q) t + ф q , - p J , где I q , p | и I q , - p | - модули; ф q , p и ф q , - p - фазы составляющих тока; q и p - номера гармонических составляющих частот щ и Q , соответственно.
Если модули и фазы составляющих суммарной и разностной частот равны, то изменение тока может быть представлено в виде амплитудно-модулированного колебания:
I ( t ) = 1 1 q p | COS Q t COS(2to t + ф q p ) .
Такое условие выполняется для низкой частоты измеряемого поля, т. е. при Q << ю.
Если частота измеряемого поля Q соизмерима с частотой возбуждения ю , такое приближение недопустимо. Упростить решение задачи в этом случае можно, если учесть, что характерной особенностью схемы выделения сигнала феррозонда является использование фазочувствительного демодулятора, который выделяет из входного сигнала только составляющую, синфазную с его опорным напряжением. Фаза опорного напряжения выбирается равной фазе ф q 0, синфазной составляющей несущего колебания в статическом состоянии при постоянном измеряемом поле. При этом квадратурная составляющая модулированного колебания, фаза которой сдвинута на угол ± п /2 относительно опорного напряжения, не детектируется фазочувствительным демодулятором.
В общем случае, когда I q , p | * I q-p | и ф q , p * ф q-p , ток в нагрузке целесообразно представить в виде суммы синфазной I сф и квадратурной I кв составляющих модулированного колебания
2 H ( j Q) 1 , 0
= I I q , p l
e (ф q , p - ф q 0 )
e -jv q 0 +
2 H ( j Q)
I
e (ф 0 - ф q , - p )
1 q 0
ej^ q 0
,
где I q , _ p и I q , p - составляющие тока, сопряженные по гармоническим составляющим огибающей модулированного колебания.
Аналогично получим передаточную функцию для квадратурной составляющей (3):
G „ ( j fi) -
I ., ( j q) = I I . . , k ‘ "- - l I q , - , k * -• H ( j Q) 2 H ( j Q)
1(t) = 1:фCOS(2Юt + Ф q ,о) + 1квSin(2Юt + Ф q ,0), где
^ = 1 | I q , - p |COS(Q t — Ф q , - p + Ф q ,0 ) +
2(2)
-
+ 2| I q , p |COS(Q t + Ф q , p - Ф q ,0 ),
к в = 1 | I q , - p | sin(Q t - Ф q , - p + Ф q ,0 ) -
-
- 2 |Iq, p| COs(Q t - ф q, p - ф q ,0)-
- Синфазную составляющую полезного сигнала (2) представим в виде
I(jj ю) = с сф
= 2 [IIq,p I COS(Фq,p - Фq,0 ) + + |Iq,-p | COs(Ф q0 - Фq,p )] +
Рассматриваемая квадратурная составляющая, возникающая при воздействии на феррозонд переменного измеряемого поля, имеет место лишь тогда, когда составляющие боковых частот не равны, т. е.
|I q , p | * I q , - p |.
Этими же причинами обусловлено появление квадратурной составляющей при прохождении амплитудно-модулированного сигнала через частотно-избирательный фильтр с несимметричными амплитудно- и фазочастотной характеристиками.
Для переменного измеряемого поля с ограниченным спектром частот p Q << q ю , пользуясь приближенным соотношением [5; 6]
q ю ± p to q to _ q ю q ю ± p ю
2 pnfl - -p^)
= ±— L2 q ?2 „± 2 p^.
Г, pQ) q ю q ю I 1 --I ( qю J представим напряжение на конденсаторе (см. рисунок) следующим образом:
= = wS Ц 2 H ( Q ) ( 1 ± j Q T + j y )
C = qp = rC [(1 + jQt)2 - Y2 ] , где w - количество витков измерительной обмотки феррозонда; S - площадь сечения сердечников;
L1 4.. 1
р 2 = — = —p max h » -1 - вторая гармоника маг-
A п h 2
нитной проницаемости сердечников; L 2 - вторая гармоника индуктивности измерительной обмотки; A = w 2 Sl -1 -коэффициент пропорциональности; l - длина сердечника; h = HIH - относительная амплитуда поля возбуждения; H m - амплитуда поля возбуждения; H s - значение поля
насыщения сердечника; у = ю L 4 /г - коэффициент регене -рации; L 4 – четвертая гармоника индуктивности измери-с 2( L o ± L ) ' 2( L 0 + L ) "
тельной обмотки; т =--------, и т =-----------— - rr постоянные времени; L0 – индуктивность измерительной обмотки.
Учитывая, что [5; 6]
ej ф о = J± j Y_, 71 + Y2
определим следующее:
– коэффициент передачи феррозонда для огибающей синфазного напряжения (квадратурная составляющая не детектируется фазочувствительным демодулятором)
G = Uc (Q) = сф H(Ω)
= —1— ( U e ' ± U e 1 = 2 H (Q) ( q ' p q • " p )
wS p2 (1 ± у2 ± j Qt') ;
rC (1 - у2 - Q2 т2 ± j Qt)V1 ± Y2 ;
– относительную амплитудно-частотную характеристику феррозонда для огибающей
W ( Q ) = U c ^ =
Uc 0
Q2t'2
, 1 ± 2 2
V (1 ± y2)2
Q 2 t2 )
1 2
Q 2 t2 ’
+ (1 - Y2)2
– фазочастотную характеристику
Ф( Q ) = arctg ---- - arctg ----2 2
1 ± y2 1 - Y 2 - Q2 t2
В диапазоне частот, характеризуемом соотношением
Q2t2 >> 1, при т 2 « т выражение (4) можно упростить:
W ( Q ) «---
Qt 14
1 - Y2
Из выражения (5) видно, что феррозонд в динамичес- ком режиме эквивалентен инерционному звену первого порядка с передаточной функцией:
W ( j Q) э =
1 ± j Qт э
где т = т 1 ± Y2 = 2(L0 ± L)(1 ± Y)2 э 1 - y2 r (1 - y 2)
Q э – эквивалентная добротность феррозонда.
Таким образом, приближенные расчеты коэффициента феррозонда для огибающей могут производиться по выражениям амплитудно-частотной и фазо-частотной характеристик эквивалентного инерционного звена:
71 ±Q2 т 2
W ( j Q) =
ф(О) = - arctg Отэ.
Для определения эквивалентного коэффициента передачи феррозонда достаточно найти постоянную времени т э' которая может быть получена экспериментально или аналитически.
В резонансном режиме экспериментально может быть найдено значение эквивалентной добротности феррозонда Q э, показывающее, во сколько раз возрастает его коэффициент преобразования для постоянного измеряемого поля, по сравнению с аналогичным коэффициентом в режиме холостого хода. Тогда, в соответствии с выражением (6), эквивалентная постоянная времени феррозонда оказывается в Q э раз больше периода Т 0 частоты возбуждения ю .
Расчетный способ определения фэ при известных параметрах нагрузки r , L , C сводится к нахождению индуктивностей L 0 и L 4. Задавшись аппроксимирующей функцией кривой намагничивания сердечника феррозонда, для определения амплитуды поля возбуждения h можно найти значения L 0 и L 4 [2].
Таким образом, при оценке динамических характеристик феррозонда, цепь нагрузки которого настроена в резонанс на частоту второй гармоники, необходимо учитывать, что его статический коэффициент преобразования в Q э раз выше, чем в режиме холостого хода, а постоянная времени возрастает в Q э раз по сравнению с периодом частоты возбуждения.
При отсутствии резонанса в цепи нагрузки, т. е. при активной или активно-индуктивной нагрузке, а также в режиме холостого хода постоянная времени оказывается соизмеримой с периодом частоты возбуждения, и ее влиянием в большинстве случаев можно пренебречь, по сравнению со значительно большими постоянными времени фазочувствительного демодулятора и избирательного усилителя.
Точность расчета по приведенным формулам достаточна для анализа динамических характеристик феррозонда в резонансном режиме при эквивалентной добротности, достигающей значений от единиц до нескольких десятков.
