Анализ динамических нагрузок на элементы конструкции гусеничных лесопогрузчиков при внешних воздействиях в виде стационарных случайных процессов

Автор: Полетайкин В.Ф.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Техника
Статья в выпуске: 8, 2013 года.
Бесплатный доступ
В статье рассмотрены вопросы применения методов статистической динамики для анализа нагрузок на элементы конструкции гусеничных лесопогрузчиков при возмущающих воздействиях на ходовую систему и корпус машины в виде непрерывных стационарных случайных процессов.
Лесопогрузчики гусеничные, динамические системы, случайные процессы, спектральная плотность, амплитудно-частотные характеристики
Короткий адрес: https://sciup.org/14083187
IDR: 14083187 | УДК: 630.377.4
The dynamic load analysis of caterpillar logger structural elements at external influence in the form of stationary random processes
The issues of statistical method application for the analysis of the load dynamics on structural elements of caterpillar loggers during the disturbing influence on the machine running gear and body in the form of continuous stationary random processes are considered in the article.
Текст научной статьи Анализ динамических нагрузок на элементы конструкции гусеничных лесопогрузчиков при внешних воздействиях в виде стационарных случайных процессов
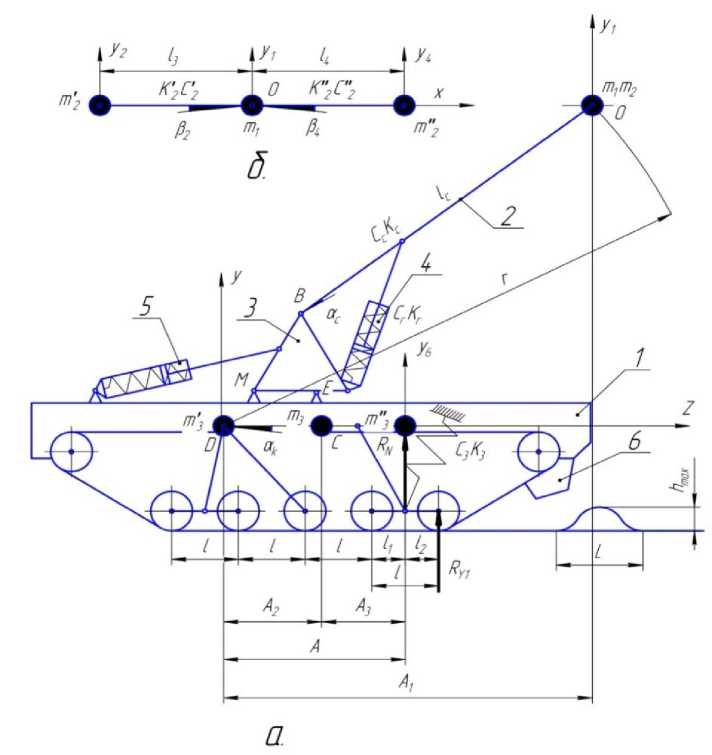
Рис. 1. Эквивалентная расчетная схема: а – с жестким грузом в захвате (сортиментами);
б – схема размещения упругого груза (хлыстов) в захвате; 1 – корпус, 2 – стрела,
3 – основание поворотное; 4,5 – гидроцилиндры привода, 6 – опора
На рисунке 1 представлена эквивалентная расчетная схема гусеничного лесопогрузчика на базе лесопромышленного трактора с полужесткой подвеской корпуса при движении с упругим грузом (хлыстами) и жестким грузом (сортиментами), разработанная с учетом особенностей конструкции машины и свойств предмета труда.
Обозначения на схеме:
m 1 – масса подвижных частей рабочего оборудования, динамически приведенная к концу стрелы;
m 2 – масса жесткого груза, приведенная к концу стрелы;
m 2 ′ , m 2 ′′ – массы вершинной и комлевой частей расчетных деревьев, приведенные в их центры тяжести;
m 3 – подрессоренная масса базовой машины и неподвижных частей рабочего оборудования;
C 2 ′ , C 2 ′′ – изгибная жесткость вершинной и комлевой частей деревьев, приведенная в центры масс;
K 2 ′ , K 2 ′′ – демпфирующие сопротивления вершинной и комлевой частей деревьев;
-
К С , К Г ,К 3 – составляющие демпфирующих сопротивлений – соответственно стрелы, гидросистемы, рессор подвески корпуса трактора.
В качестве обобщенных координат, определяющих положение масс m 1 , m 2 , m 3 , приняты линейные перемещения y 1 , y 6 , y 2 , y 4 .
Параметры m 3 , y 6 , c 3 , k 3 приведены к центру массы m 1 .
-
А, А 1 ,А 2 ,А 3 ,А 5 – линейные размеры базовой машины и технологического оборудования; l 3 ,l 4 – размеры вершинной и комлевой частей деревьев; L, h max – размеры препятствий; q i (t) – внешние возмущающие воздействия (реакции опорной поверхности).
Математические модели лесопогрузчиков разработаны в виде систем неоднородных дифференциальных уравнений второго порядка. Система (1) описывает состояние лесопогрузчика при движении с жестким грузом (сортиментами), система (2) – при движении с упругим грузом (хлыстами).
ll y + пУyi - 2Пб ■ —c • y6 + ^6 y - A6 ■ — • Уб =
( Q 1 ( t t
( m i + m 2 ) l
. A , - A a}
У б + ■ 2ry У б 1 \ л
A \ A y
■ .2 ■ A 7 y 6 - АУ y +
AA
+ llAA ■ А Уб - A ■ 2^6y + l A ■ 2^8 y6 = -1- Q(t) A A Am
Y + А2 Y - А2 Y + 2nY - 2nY = Q, (t)--- 2 2 2 21 22 212
m 2 l 3
Y + А Y 4 - А Yi + 2^ - 2^ = Q 4 ( t) — m 2 l 4
Y + Ai Y - Ai Y6 c-+2nY - 2пАб у— ®4 Y2+Al Yi - А> Y4 + А Yi -6A 6A 42 4 545
- 2y Y4 + 2п Yi - 2^ Y2 + 274 Y = Qi (t) — m lC
2 2 A 2 lC AA
Y 6 + 2 П 7 Y 6 + A 7 Y 6 - A 8 Y i ' A 8 Y 6 .2 - 2 П 8 Y i ~ +
AAA
= Q 3 ( t )
m 3 A
lA
+ 2% Y6 C A где Ai - парциальные частоты [1];
n i - удельные демпфирующие сопротивления [1];
Q i ( t ) – внешние возмущающие воздействия на систему.
В работах [2, 3, 4, 6] по исследованию нагрузок на линейные динамические системы машин последние рассматриваются в виде систем автоматического регулирования с обратной связью, на вход которых подаются возмущения в виде гармонических или случайных функций. Свойство линейных динамических систем сохранять закон проходящих сигналов позволяет получать энергетические спектры выходных параметров в виде тех же функций. Выходными параметрами являются перемещения, скорости, ускорения вынужденных колебаний, а также динамические нагрузки на элементы конструкции машин. При этом используется уравнение
S y А )= | w A ) 2 ■ S x (А,
где I W(А) I - модуль амплитудно-фазовой частотной характеристики системы (амплитудно-частотная характеристика);
S y А) — энергетический спектр параметра выходного процесса - нагрузок на элементы конструкции машины;
S x А) - энергетический спектр параметра входного процесса - внешних возмущающих воздействий на систему;
а - круговая частота вынужденных колебаний системы.
Данное уравнение позволяет по известным характеристикам случайных процессов внешних воздействий и свойствам динамических систем получать соответствующие характеристики случайных процессов динамических воздействий на элементы конструкции (на выходе системы). При исследованиях и расчетах лесопогрузчиков в качестве характеристик внешних воздействий использованы спектральные плотности процессов силового взаимодействия ходовой системы и корпуса лесопогрузчика с опорным массивом – Sx(f), полученные путем статистической обработки результатов экспериментальных исследований данных процессов [1].
Модули амплитудно-фазовых частотных характеристик систем (амплитудно-частотные характеристики) определялись путем прямого преобразования Лапласа и Фурье систем дифференциальных уравнений (1), (2), которые предварительно представляются в операторной форме, т.е. с использованием операторов дифференцирования p = d/dt ; p 2 = d 2 /dt2 . При преобразовании Лапласа дифференциальных уравнений с целью получения выражений передаточных функций динамических систем оператор дифференцирования Р заменяется комплексным числом S. Передаточной функцией динамической системы называется отношение преобразования Лапласа выходной координаты y 1 (s) к преобразованию Лапласа функции воздействия F 1 (s). Так как передаточная функция является комплексной, она определяет соотношение амплитуды выходного параметра к амплитуде входного и сдвиг по фазе между данными параметрами.
Для определения из выражений передаточных функций и амплитудно-фазовых частотных характеристик необходимо перейти от преобразования Лапласа к преобразованию Фурье представлением комплексного числа в виде S = ia - комплексной частоты (а - круговая частота, 1 2 = -1). Переходя от преобразований Лапласа к преобразованию Фурье, получим амплитудно-фазовую частотную характеристику (А.Ф.Ч.Х.) динамической системы. Модуль А.Ф.Ч.Х. представляет собой амплитудно-частотную характеристику (А.Ч.Х) динамической системы. Передаточные функции обобщенных координат у 1 , у 6 эквивалентной динамической системы лесопогрузчика, полученные в результате функциональных преобразований уравнений, получены в следующем виде [1]:
Здесь
wy 1 (s ) =
wy 6 (s ) =
2(277 (s)+ а72 )d2 (s) d 1 (s )• d 4 (s)- d 2 (s )• d 3 (s)
2(2П7 (s)+ ^ )d 1 (s) d 1 (s )• d 4 (s)- d 2 (s )• d 3 (s)
d 1 (s ) = s2 + a1 s + a 2, d 2 (s ) = a 3 s + a 4,
d 3 (s ) = b3 s + b4,
d 4 (s ) = s2 + b1 s + b 2.
Числовые значения коэффициентов при комплексном числе s приведены в табл. 1.
Значения коэффициентов при комплексном числе s
Таблица 1
|
Обозначение |
Класс лесопогрузчика, кН |
|
|
30 32 |
40 42 |
|
|
a i =2 n 6 |
0,38 |
0,58 |
|
a 2 = O 62 |
7,57 |
6,64 |
|
а з =2 п бШ |
0,594 |
0,944 |
|
а 4 = Ш б 2Ш |
11,84 |
10,805 |
|
b i =A i /A2 n 7 +l c A i /A 2 2 n 8 |
6,674 |
15,045 |
|
b 2 = O 72 +l c A l /A 2 O 82 |
38,096 |
32,098 |
|
b 3 =A i /A2 n 6 |
0,435 |
0,608 |
|
b 4 =A l /A ^W 8 |
7,192 |
7,336 |
После перехода от преобразования Лапласа к преобразованию Фурье, получим амплитудно-фазовые частотные характеристики динамической системы в следующем виде:
w y 1 fa ) =
M, -M,a2 + iaM. 64 3
a 4 — M 0 a 2 + M 5 — i ( M 1 a 3 — M 2 a )
/. \ M. — M.a2 + ia-M.. — M., • ia3
w 6 fa) = —--------3---7---- y a4 — M 0a2 + M 5 — i a3 M 1 + i aM 2
Числовые значения коэффициентов M i приведены в табл. 2.
Таблица 2
Значения коэффициентов M i амплитудно-фазовых частотных характеристик W yi ( ia), W y6 ( ia)
|
Обозначение |
Класс 30 32 кН |
Класс 40 42 кН |
||
|
W y i ( a |
W y6 (ia) |
W y i ( ia) |
W y6 (ia) |
|
|
М 0 |
41,982 |
41,982 |
46,948 |
46,9481 |
|
М 1 |
7,054 |
7,054 |
15,625 |
15,625 |
|
М 2 |
55,576 |
55,576 |
105,022 |
105,022 |
|
М 3 |
141,673 |
49,786 |
243,62 |
102,938 |
|
М 4 |
5,507 |
57,215 |
17,959 |
51,352 |
|
М 5 |
203,234 |
203,234 |
133,864 |
133,864 |
|
М 6 |
635,713 |
406,448 |
435,636 |
267,711 |
|
М 7 |
0 |
9,972 |
0 |
19,024 |
С целью определения энергетических спектров внешних воздействий на динамические системы лесопогрузчиков были проведены экспериментальные исследования случайных процессов X(t) взаимодействия ходовой системы и корпуса с опорной поверхностью при движении машины с упругим (хлыстами) и жестким (сортиментами) грузом. В результате корреляционного и спектрального анализа реализаций случайных процессов были определены их нормированные спектральные плотности [1]. Спектральная плотность характеризует распределение энергии колебаний по непрерывным частотам разложения. Полученные значения амплитудно-частотных характеристик динамических систем лесопогрузчиков и спектральных плотностей S x (f) процессов внешних воздействий на динамические системы X(t) позволяют перейти к вычислениям спектральной плотности случайных процессов динамических нагрузок на элементы конструкции лесопогрузчика S y (a).
В результате спектрального анализа случайных процессов x i (t ) получены нормированные спектральные плотности внешних воздействий. Поэтому при вычислении энергетических спектров динамических нагрузок на рабочее оборудование (выходных параметров) значения S x ( f) умножались на дисперсии процессов ox2.
Sy i (a)= Sxi (f) •O xi2 \Wyi (ia)\2. (9)
Значения частоты возбуждения при скорости грузового хода 0,7–1,4 м/с (2,52–5,04 км/ч) в единицах частоты периодического процесса (Гц) и угловой частоты (с -1 ) приведены в табл. 3.
Частота возбуждения ю при различных значениях скорости движения V (a=2nf)
Таблица 3
|
V |
км/ч |
2,52 |
2,88 |
3,24 |
3,6 |
3,96 |
4,32 |
4,32 |
5,04 |
|
a |
Гц |
1 |
1,176 |
1,32 |
1,47 |
1,62 |
1,765 |
1,765 |
2,06 |
|
с -1 |
6,28 |
7,385 |
8,29 |
9,232 |
10,18 |
11,08 |
11,08 |
12,92 |
Известно, что если входной процесс x(t) является нормальным и центрированным с заданной спектральной плотностью Sx(a), то установившаяся реакция на него (выходной процесс) также нормальна и цен- трирована с дисперсией ар 12 [5,7]. Распределение вероятностей нагрузок на подвеску корпуса соответствует нормальному закону [1]. Следовательно, динамические нагрузки на рабочее оборудование распределены также по нормальному закону. Исходя из этого, дифференциальную функцию распределения амплитуд нагрузок на рабочее оборудование определим по формуле [7]:
f (Pi ) =

( р - р )! 2 а Р 2
где р 1 — р 1 - отклонение случайной величины нагрузок р 1 от среднего значения;
а р 1 - среднеквадратическое отклонение нагрузки р 1 .
Значения а р 1 для рассматриваемых динамических систем определялись по формуле:
а р 1 = DpPi.
1~
Здесь Dp 1 = j Sp1 (a)da - дисперсия процесса динамического нагружения рабочего обору- п 0
дования, равная площади под кривой спектральной плотности нагрузок p 1 с учетом принятых масштабов по осям абсцисс и ординат [7].
На рисунке 2 представлены дифференциальные функции распределения амплитуд динамических нагрузок на рабочее оборудование лесопогрузчиков класса 25 и 35 кН в интервале ±3 o pi относительно центра группировок. В качестве центра группировок, относительно которого определялись амплитуды динамических нагрузок на элементы конструкции и значения их вероятностей, принято математическое ожидание нагрузок на технологическое оборудование, равное номинальной грузоподъемности лесопогрузчика.
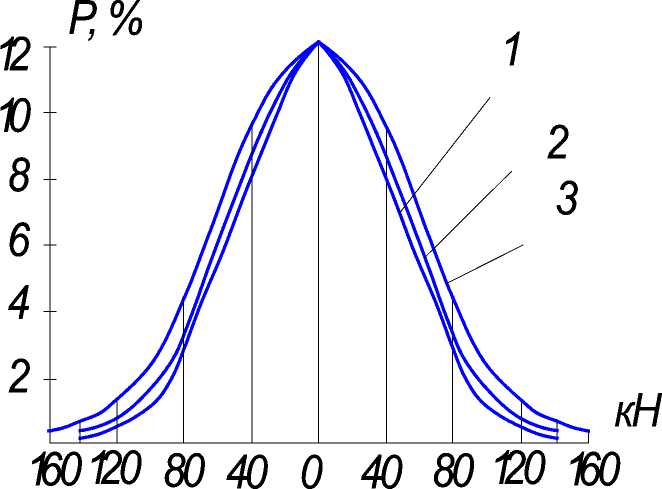
Рис. 2. Кривые распределения амплитуд нагрузок на рабочее оборудование:
1 – лесопогрузчик класса 25 кН с упругим грузом; 2 – лесопогрузчик класса 35 кН с упругим грузом;
3 – лесопогрузчик класса 25 кН с жестким грузом
