Анализ характеристик низкоорбитальной системы космического зондирования Земли на основе двухзеркальной оптической схемы Ричи–Кретьена

Автор: Салмин В.В., Волоцуев В.В., Петрухина К.В., Сафронов С.Л., Ткаченко И.С., Коровин М.Д.
Журнал: Компьютерная оптика @computer-optics
Рубрика: XI International conference on information technology and nanotechnology
Статья в выпуске: 6 т.49, 2025 года.
Бесплатный доступ
Проведён анализ массогабаритных параметров оптико-электронной аппаратуры низкоорбитального космического аппарата дистанционного зондирования Земли и предложен вариант ее модернизации с целью оптимизации компоновочной схемы аппарата. Проведен анализ параметров электроракетной двигательной установки для поддержания низкой орбиты такого космического аппарата. На основе анализа полученных результатов разработана методика выбора проектных параметров низкоорбитального космического аппарата дистанционного зондирования Земли с оптико-электронной аппаратурой наблюдения, включающей поворотное зеркало переотражения, позволяющей получать космические снимки с высоким пространственным разрешением. Описан проектный облик перспективного низкоорбитального космического аппарата дистанционного зондирования Земли с корректирующей электрореактивной двигательной установкой, основные проектные параметры которого выбраны благодаря разработанной методике.
Дистанционное зондирование Земли, корректирующая электроракетная двигательная установка, поддержание орбиты, оптико-электронная аппаратура с поворотным зеркалом, двухзеркальная оптическая схема
Короткий адрес: https://sciup.org/140313286
IDR: 140313286 | DOI: 10.18287/COJ1836
Analysis of Performance Characteristics of a Low-Orbit Space Remote Sensing System Based on a Two-Mirror Ritchey–Chrétien Optical Design
The article presents an analysis of size and mass characteristics of an optical space-based remote Earth sensing system. An approach for modification of the two-mirror Ritchey–Chrétien optical design is proposed in order to be able to implement it on board of a low-orbit streamlined satellite fitted with an electric propulsion system for orbit correction. A procedure for joint optimization of the satellite platform and payload characteristics is described. An analysis of the propulsion system is carried out. A method for designing low-orbit small surveillance spacecraft with optical payload fitted with a swivel mirror, capable to produce high-resolution imagery, is proposed. A preliminary design of a low-orbit streamlined satellite, obtained using the developed method, is presented.
Текст научной статьи Анализ характеристик низкоорбитальной системы космического зондирования Земли на основе двухзеркальной оптической схемы Ричи–Кретьена
Одной из актуальных задач в дистанционном зондировании Земли из космоса является повышение качества получаемой информации. Одним из путей повышения разрешения изображений является снижение высоты рабочей орбиты, что безусловно влечет за собой необходимость ее поддержания, а также решение задачи оптимизации конструктивно–компоновочной схемы спутника.
Одним из путей решения задачи увеличения срока существования космического аппарата (КА) на низкой околоземной орбите является уменьшение площади миделева сечения аппарата за счёт применения вытянутой компоновки и ориентации его корпуса преимущественно вдоль вектора орбитальной скорости. Так, аппараты с похожей компоновкой использовались в программе КА дистанционного зондирования Земли (ДЗЗ) серии «Keyhole». Другим примером может служить созданный Европейским космическим агентством КА GOCE, который успешно функционировал на орбитах высотой порядка 280 км в течение 3,5 лет за счёт корректирующих электрореактивных двигателей. Запущенный в конце 2017 года агентством JAXA КА ДЗЗ – демонстратор технологий SLATS был оснащён оптико–электронной аппаратурой наблюдения SHIROP, созданной по схеме Кассегрена с габаритными размерами 270×540×270 мм [1]. Ввиду того, что комплекс оптико–электронной аппаратуры был размещён перпендикулярно направлению полёта, его размеры были крайне ограничены. Решением проблемы ограничения габаритных размеров целевой аппаратуры может стать включение поворотного зеркала в состав оптической схемы. Известны единичные примеры успешной реализации подобных решений на КА ДЗЗ серии «Keyhole».
Встаёт вопрос о конструировании спутника с оптико–электронной аппаратурой и оптимизации схемы наблюдения. В целях создания методической базы для проектирования низкоорбитальных КА ДЗЗ требуется проведение анализа основных проектных характеристик низкоорбитальной системы космического ДЗЗ на основе двухзеркальной оптической схемы Ричи–Кретьена с поворотным зеркалом переотражения. Для поддержания рабочей орбиты необходим алгоритм коррекции параметров низкой орбиты с учётом стохастического характера изменения плотности верхней атмосферы. Кроме того, требуется учет других ключевых проектных ограничений, включая расположение и характеристики бортовых систем, массовые и энергетические ограничения.
1. Анализ массогабаритных параметров оптико–электронной аппаратуры наблюдения
Срок существования космического аппарата ДЗЗ, совершающего полёт на низкой околоземной орбите, в большой степени определяется площадью его миделева сечения, которая, в свою очередь, ограничена минимально допустимыми размерами оптико–электронного комплекса наблюдения. Таким образом, оценка компоновочных решений требует проектно–конструкторского анализа возможных вариантов схем наблюдения, ориентации корпуса, компоновок внутреннего и внешнего оборудования космической платформы, параметров возможных орбит.
Была произведена оценка массогабаритных характеристик оптико–электронного телескопического комплекса на ранних этапах проектирования, предназначенного для получения высокодетальных снимков с орбит высотой от 250 до 350 км по методикам, изложенным в [2–4]. При этом рассматривалась зарекомендовавшая себя двухзеркальная оптическая схема Ричи–Кретьена.
Снижение эффекта падения высоты орбиты от воздействия верней атмосферы Земли достигается минимизацией баллистического коэффициента проектируемого КА ДЗЗ. Одним из способов снижения баллистического коэффициента КА является использование оптических схем с поворотным зеркалом, в которых к традиционной зеркально–линзовой системе добавляется плоское зеркало, находящееся под углом к оптической оси главного зеркала, как показано на рис. 1. Применение такой схемы позволяет КА осуществлять съемку в благоприятных, с точки зрения минимизации тормозящего воздействия внешней атмосферы, режимах ориентации.
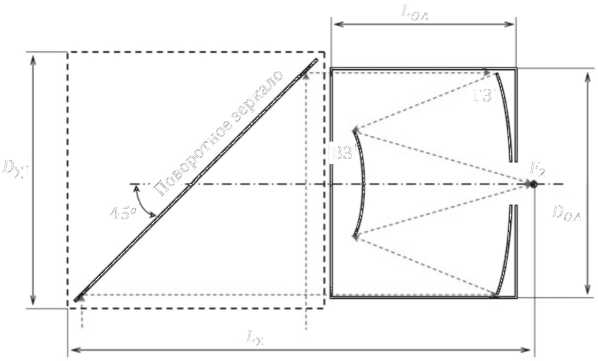
Рис. 1. Оптическая схема с поворотным зеркалом
Компоновочная схема выбирается из следующих условий. Телескопический комплекс размещён так, чтобы его ось совпадала с продольной осью КА, которая, в свою очередь, направлена вдоль трансверсальной ос орбитальной системы координат. Поперечные размеры корпуса КА выбираются из условия минимизации площади миделя и ограничены диаметром телескопического комплекса. Длина корпуса выбирается достаточной для размещения бортовой аппаратуры КА. Схема размещения и потребная площадь панелей солнечных батарей выбирается согласно требованиям к электропитанию. Телескопический комплекс включает в себя главное зеркало (ГЗ), вторичное зеркало (ВЗ), а также фотоприёмные устройства. Зеркало переотражения также должно находиться внутри корпуса на специальном подвесе, позволяющем стабилизировать его положение и управлять его наклоном.
В первом приближении, диаметр зеркала переотражения может быть оценён из условия его ориентации под углом 45 градусов к продольной оси КА и, соответственно, к оптической оси главного зеркала и вторичного зеркала. Необходимо отметить, что дополнение оптической системы зеркалом переотражения ведёт к ухудшению её пространственного разрешения за счёт снижения контрастности. В последующих расчётах этот недостаток учитывается снижением на 10 процентов вычисленной величины пространственного разрешения.
Основные математические выражения для расчета массогабаритных параметров приведены ниже [3, 4]:
Dmin = ^- , ^=(0,81 ± 0,08)-^л
^^О^м -ГЗ dtk = kD -Dr3, Ьтк = k[ -f3KB, 5поВ.тк = п • D™ • (-ТК + ^к),(2)
Мтк = куд •^пов.ТЮ где Dmin- минимальный потребный диаметр главного зеркала оптической системы; Лр - средняя длина оптической волны из анализируемого диапазона; LM - пространственное разрешение; к0 - нормированная пространственная частота (в расчетах к0 = 0,3 ± 0,03); Н - высота КА над снимаемым объектом; /экв -эквивалентное фокусное расстояние оптической системы; DГЗ - диаметр главного зеркала; Л1 эл - линейный размер одного ПЗС -элемента; kD - коэффициент превышения диаметра корпуса телескопического комплекса над диаметром главного зеркала (kD = 1,1 ^ 1,2); DTK - диаметр телескопического комплекса; к^ - коэффициент, учитывающий уменьшение длины корпуса по сравнению с фокусным расстоянием /экв (к^ = 0,2 ^ 0,25), при этом приёмник сигнала находится рядом с фокальной плоскостью в точке F2; LTK - длина телескопического комплекса; SповТК - площадь поверхности телескопического комплекса; куд - удельная масса единицы площади поверхности телескопического комплекса; МТК - масса телескопического комплекса.
Массогабаритная модель оптико–электронного телескопического комплекса с плоским зеркалом переотражения приведена на рис. 2.
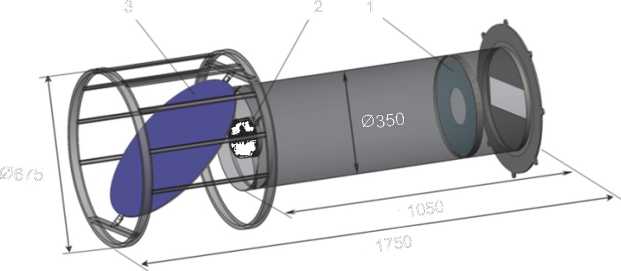
Рис. 2. Габаритные размеры телескопического комплекса: 1 – главное зеркало; 2 – вторичное зеркало; 3 – плоское поворотное зеркало
Оценка основных проектных параметров была произведена для КА ДЗЗ, способного осуществлять съемку с пространственным разрешением 50 ÷ 60 см, функционирующего на орбите высотой 250 ÷ 350 км. В первом приближении, площадь миделя КА, полученная из оценочных габаритных характеристик оптической системы, параметров эффективности солнечных батарей и выбранной компоновки КА, составит порядка 0,5 м2. Диаметр главного зеркала составит D ГЗ =35 см, площадь солнечных батарей – порядка 6 ÷ 9 м2, среднесуточная мощность солнечной энергоустановки – порядка 500÷ 800 Вт. Для КА с D ГЗ =35 см масса аппарата в данной задаче может составить от 200 до 400 кг в зависимости от качества проектно–конструкторских работ и используемых технологий.
Длительность срока активного существования КА ДЗЗ на низкой околоземной орбите достигается с помощью электрореактивной двигательной установки (ЭРДУ). В качестве проектных параметров ЭРДУ приняты марка двигателей, их количество, запас рабочего тела, циклограмма включения и среднесуточное электропотребление.
2. Анализ параметров электроракетной двигательной установки
Для формирования ЭРДУ могут быть рассмотрены существующие летные модели стационарных плазменных двигателей марок СПД–50М, СПД–70 и инженерная модель двигателя СПД–70М. При выборе потребной силы тяги для коррекции низкой рабочей орбиты исследуемого КА ДЗЗ был проведён анализ уровня силы сопротивления верхней атмосферы. Характеристики рассматриваемых двигателей для разных вариантов рабочего тела (ксенон и криптон) и разной мощности (ионизация криптона требует на 10 – 20% больших затрат энергии) приведены в таб. 1. Увеличение напряжения электропитания увеличивает износ катодов двигателя, что снижает ресурс его работы, однако, для относительно непродолжительных миссий, такое понижение ресурса несущественно.
Таб. 1. Характеристики стационарных плазменных двигателей
|
Параметр |
Марка ЭРД |
||||
|
СПД–50М |
СПД–70 |
СПД–70М |
|||
|
Рабочее тело |
Ксенон |
Ксенон |
Ксенон |
Криптон |
Ксенон |
|
Мощность, [Вт] |
225 300 |
670 |
600 |
800 |
800 |
|
Сила тяги, [мН] |
14,8 18,0 |
39,2 |
36,0 |
37,0 |
48,0 |
|
Удельный импульс, [с] |
930 1200 |
1470 |
1430 |
1490 |
1530 |
|
Ресурс работы, [час] |
> 5000 |
> 3100 |
> 7000 |
||
|
Ресурс работы, [кол–во включений] |
> 11000 |
> 3000 |
> 11000 |
||
|
Статус |
Летная модель |
Летная модель |
Инженерная модель |
||
На основе полученных результатов был выбран вариант ЭРДУ, которая будет включать в свой состав один работающий двигатель СПД–70М (рабочее тело криптон). Рекомендуемый запас криптона составляет порядка
50 кг, которого должно хватить для поддержания низкой околокруговой орбиты со средней высотой порядка 300 км в период с 2025 по 2032 годы (7 лет). При среднесуточной мощности энергоустановки N ср.сут = 500 Вт (нижняя граница из планируемого уровня производства электрической мощности на КА ДЗЗ с D ГЗ = 35 см и S СБ = 6 ÷ 9 м 2 ) СПД–70М может работать не менее 8 витков в сутки непрерывно.
3. Коррекция параметров низкой орбиты с учётом стохастического характера изменения плотности верхней атмосферы
Радиус орбиты низкоорбитального КА может значительно снижаться в связи с изменением воздействия тормозящей силы, вызванного колебаниями состояния верхней атмосферы на высоте полёта, например, вызванными солнечной активностью. Для оценки отклонений параметров орбитального движения КА под действием аэродинамических возмущений на низких орбитах был проведён анализ влияния возмущений состояния атмосферы на режимы коррекции высоты орбиты. модельная плотность атмосферы вычислялась по стандартным обобщенным зависимостям, как рассмотрено в [5]. К статистическим моделям была добавлена стохастическая составляющая, учитывающая, помимо прочих факторов, текущую солнечную активность.
Коррекция параметров орбиты производится согласно нижеследующему алгоритму. Текущие значения параметров Т и г „ в момент t = t j , полученные по уравнения прогноза, проверяются на вхождение в область допустимых значений. В том случае, если Тt(t j +1) и r7r * (t j +1) находятся в допустимой области, производится прогнозирование конечных значений этих параметров и оценка прогнозируемых конечных ошибок. Если ошибки меньше допустимых, то включение двигателя на данном шаге не производится. В том случае, когда прогнозируемые ошибки А ТAt), tiAtk) велики, производится определение номера витка S, где значения параметров ТAt), tAt s ) имели допустимые значения. Для того, чтобы привести значения параметров Т, rn к допустимым величинам к моменту t = ts+2., на витке (S + 1) производится включение двигателя (в окрестности перигея орбиты). Параметры управления рассчитываются по уравнениям движения.
Существуют два способа коррекции – коррекция с перерегулированием, когда величины контролируемых параметров переводятся на противоположную границу области допустимых значений, и полная коррекция, когда величины ошибок по контролируемым параметрам сводятся к нулю [6].
Для симуляции процесса получения и обработки навигационной информации использовалась «имитационная» модель плотности, основанная на «динамической» модели атмосферы с добавлением случайных флуктуаций плотности.
Модель позволяет имитировать резкие изменения плотности верхней атмосферы, вызванные вспышками на Солнце. Случайная функция плотности δρ представлялась в виде канонического спектрального разложения по аргументу широты со случайными коэффициентами. Для рассмотренных вариантов моделирования среднеквадратическое отклонение δρ/ρн составило 0,05–0,15.
Начальные условия расчетного и фактического движений предполагались одинаковыми, баллистический коэффициент σх не изменялся в течение всего интервала управления; на каждом витке имитировались измерения силы аэродинамического сопротивления в 20–40 точках орбиты, что позволяло аппроксимировать согласующую функцию плотности рядом Фурье с сохранением двух членов разложения.
При расчёте были использованы две модели плотности. Первая модель имитировала только короткопериодические случайные вариации плотности, вторая имитировала ситуацию типа «вспышки на Солнце» способом, описанным выше. Параметры корректируемой орбиты были таковы: h l0 = 160 км , hа0 = 350 км ; допустимая ошибка по периоду обращения А Т доп = ±1 с, по перигейному расстоянию Агп доп = ±1 км (рис. 3) [6].
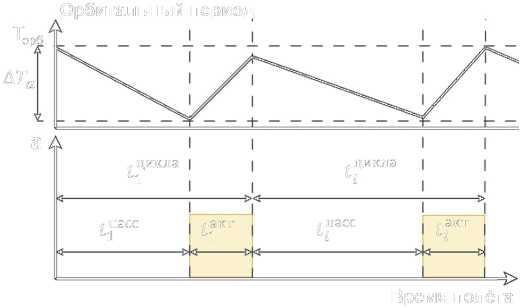
Рис. 3. Способ поддержания низкой рабочей орбиты путем коррекции накопленного отклонения (по периоду обращения)
Параметры управления движением рассчитываются по приближённым формулам на основе оценки значения плотности атмосферы путём измерений составляющих силы аэродинамического сопротивления. Многошаговый алгоритм коррекции, приведённый выше, позволяет эффективно управлять высотой низкой орбиты КА при резких изменениях плотности верней атмосферы.
Анализ результатов моделирования позволяет утверждать, что алгоритм управления надежно обеспечивает поддержание контролируемых параметров в заданных пределах при короткопериодических вариациях плотности верхней атмосферы. Однако при резком и непредсказуемом увеличении плотности атмосферы, вызванным солнечной активностью, контролируемые параметры движения КА выходят из допустимой области к концу 15 ÷ 25 витков. В этом случае происходит адаптация путём повышения частоты корректирующих воздействий от ЭРДУ, что, в свою очередь, увеличивает энергетические затраты КА. В результате на 45÷60 витках параметры Т и Rn не выходят из заданных пределов. Увеличение энергетических затрат и частоты коррекции может отрицательно сказаться на способности КА осуществлять съемку поверхности, так как совместная работа ЭРДУ и целевой аппаратуры КА не предполагается.
Следует отметить, что для более высоких орбит со средней высотой порядка 400 км, где влияние аэродинамических возмущений сказывается в меньшей степени, алгоритм продолжает эффективно работать и при указанных значениях допустимых ошибок.
4. методика выбора оптимальных проектных характеристик КА ДЗЗ
Процедура совместной оптимизации законов управления и проектных параметров КА может быть сведена к следующему [7]:
1 .Производится формирование общей задачи совместной оптимизации КА.
2 .Выделяется динамическая часть задачи оптимизации, представляющая собой выбор режимов управления движением.
3 .Динамическая задача решается последовательно, с использованием моделей различной точности, детализации и полноты.
4 .Решается задача совместной оптимизации циклограмм коррекции и проектных параметров КА. Выбираются в первом приближении основные параметры проектного облика КА, режимы управления и энергетика манёвра.
5 .На основе уравнения баланса масс формируется проектная модель КА с двигателями малой тяги.
6 .Исследуется влияние неопределённых факторов как на результаты решения динамической задачи, так и на значения проектных параметров. Реализуется гарантирующий подход, то есть определяются параметры, обеспечивающие минимум максимального проигрыша в критерии оптимальности.
5. Поддержание параметров орбиты в течение длительного срока существования
При выборе ЭРДУ для исследуемого низкоорбитального КА проводился проектный анализ ограничений по располагаемой электрической мощности. В качестве ограничений использовалось следующее выражение: Ncp . сут >Nydc6 5 СБ cos а ср , где Ncp . сут - среднесуточная величина электрической мощности, вырабатываемой солнечными батареями; N- уд . сб - удельная электрическая мощность с единицы площади солнечной батареи (Вт/м2); 5 СБ - общая площадь солнечных батарей( м 2 ); cos а ср - среднеинтегральный косинус угла между нормалью к плоскости солнечной батареи и вектором направления на Солнце.
Используя описанный метод, можно подобрать величину потребной силы тяги ЭРДУ и режимы её включения для последующего выбора проектных параметров маршевого двигательного блока и оценки затрат рабочего тела на поддержание низкой рабочей орбиты КА в зависимости от выбранного режима коррекции.
С учетом ограничений на режимы работы ЭРДУ и оценочных значений проектных параметров КА ДЗЗ с поворотным зеркалом, приведённых в таб. 2 был проведён расчёт процессов коррекции рабочей орбиты.
Таб. 2. Проектные параметры КА ДЗЗ с поворотным зеркалом
Проектный параметр
Масса КА
Габариты (с раскрытыми панелями солнечных батарей)
Высота около круговой рабочей орбиты Срок существования
Вид целевой аппаратуры
Диаметр главного зеркала Фокусное расстояние Габариты телескопического комплекса Пространственное разрешение
Масса ЭРДУ
– из них масса рабочего тела
Ориентировочное значение
400 кг
4,25 м × 3,1 м × 1,35 м
300 км ÷ 400 км
7 лет оптико–электронная аппаратура (оптическая система с плоским поворотным зеркалом)
0.35 м
6 м
0,96 м × 0,96 м × 2,5 м
0,5 м ÷ 0,6 м (в панхроматическом режиме) порядка 100 кг
40 кг ÷ 50 кг
Для указанного КА ДЗЗ проведен анализ параметров цикла коррекции околокруговых рабочих орбит с высотами от 250 км до 400 км. Цикл коррекции представляет из себя график изменения среднего радиуса орбиты во времени: сначала его уменьшение под действием аэродинамической силы до допустимого отклонения ΔR орб ; затем восстановление первоначального радиуса орбиты с помощью силы тяги ЭРДУ.
Расчеты силы аэродинамического сопротивления показали, что максимальное ее значение для предлагаемого проекта КА составляет порядка 17 мН на орбите высотой 300 км в период максимальной солнечной активности. При средней солнечной активности аэродинамическая сила не превысит 6 мН.
Проведено исследование возмущенного движения с использованием цифровой модели динамической плотности атмосферы на период с 2025 года до 2032 года. Результаты моделирования показывают, что даже на нижней границе исследуемого диапазона высот орбит (300 км) коррекция при заданных проектных параметрах КА и ЭРДУ возможна при любой солнечной активности. При средней солнечной активности (F 0 = 150 ∙ 10 22Вт/м2Гц) при выбранном допустимом отклонении радиуса орбиты (ΔR орб =2 км), время целевой работы в цикле составляет порядка 3,5 суток, а время коррекции от 1 суток до 1,5 суток в зависимости от массы КА. При подъеме орбит до 350 км время на коррекцию радиуса орбиты уже не превышает одних суток, а время целевой работы может быть от 4 до 26 суток, в зависимости от текущей солнечной активности.
Заключение
В настоящей статье представлен анализ характеристик низкоорбитальной системы космического ДЗЗ на основе двухзеркальной оптической схемы Ричи–Кретьена с поворотным зеркалом переотражения.
Проведена оценка массо–габаритных характеристик аппаратуры наблюдения. Описана методика выбора проектных параметров для низкоорбитального КА ДЗЗ с оптико–электронной аппаратурой наблюдения, включающей поворотное зеркало переотражения, позволяющей получать космические снимки с высоким пространственным разрешением, на основании которой предложен проектный облик перспективного низкоорбитального КА ДЗЗ с корректирующей ЭРДУ.
Представлен алгоритм методики выбора оптимальных проектных характеристик КА ДЗЗ с учетом оптимизации законов управления и проектных параметров. Проведена оценка потребного запаса рабочего тела (криптон) для КА ДЗЗ с пространственным разрешением 0,5 ÷ 0,6 м, функционирующем на низкой орбите.
Анализ результата моделирования орбитального движения показывает, что при расчётных проектных характеристиках оптико–электронного телескопического комплекса возможно создание КА ДЗЗ сверхдетального наблюдения с массой не выше 1000 кг, то есть принадлежащего к классу малых КА, пригодных для запуска на орбиту с помощью ракет–носителей легкого класса [8–10]. Наличие ЭРД с мощностью 250–700 Вт с ресурсом работы больше 7000 часов позволяет обеспечить активное функционирование КА ДЗЗ в течение 7 лет.
Исследование выполнено за счет гранта министерства образования и науки России на реализацию крупного научного проекта в рамках приоритетных направлений научно–технологического развития (соглашение № 075– 15–2024–558 от 25.04.2024).
