Анализ и синтез инвариантной системы управления электроприводом

Автор: Доманов Виктор Иванович, Доманов Андрей Викторович, Мурзаков Дмитрий Геннадьевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Актуальные проблемы машиностроения
Статья в выпуске: 2-4 т.17, 2015 года.
Бесплатный доступ
Рассматриваются вопросы построения инвариантных систем управления следящих электроприводов. Приведены формулы для определения параметров инвариантных цепей. Определены показатели колебательности для таких систем. Приводятся графики переходных процессов электропривода с различными инвариантными цепями. Отмечается эффективность применения упреждающей коррекции для снижения динамических ошибок.
Следящий электропривод, точность, ошибка, инвариантная система, показатель колебательности, передаточная функция, упреждающая коррекция
Короткий адрес: https://sciup.org/148203658
IDR: 148203658 | УДК: 621.3.076
Analysis and synthesis of electric drive invariant control system
Questions of creation the invariant control systems of the follow-up electric drives are considered. Formulas for determination the parameters of invariant circuits are given. Oscillation indicators for such systems are defined. Schedules of transition processes of the electric drive with various invariant circuits are provided. Efficiency of application the pre-emptive correction for decrease in dynamic errors is noted.
Текст научной статьи Анализ и синтез инвариантной системы управления электроприводом
При учете компенсирующей связи изображения для регулируемой величины X ( p ) и ошибки системы ε ( p ) соответственно будут равны
X(P)=Ф (P G(P)
,
W ( p )" 1 + W g ( р ) где W ( p ) = W ( pW ( p ) ; , x 1 W 1 ( p ) . .
Ф ( p ) 1 + W ( p )
^( p ) = Ф. ( p )• G( p ), (2)
где
Ф £ ( P ) =
1 + Wg (P )• W2 (P ) 1 + W (P )
Из последнего выражения следует условие инвариантности по задающему воздействию
Wg( p )=Xw2 ( p )
.
б

в
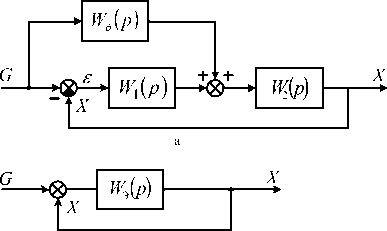
Рис. 1. Структурная схема системы с инвариантным управлением.
Выполнение условия (3) позволяет устранить вынужденную составляющую ошибки слежения, вызванную изменением управляющего воздействия G ( t ). Разложение в ряд условия (3) позволяет определить формирование компенсирующей цепи
W (P )=k- W (p )=
p
;
k 2
p 2 ( T 1 P + 1 )
Wg (P ) =
W2 (P )
= т P + TP + •••
Таким образом, в следящих электроприводах для улучшения их работы требуется вводить производные от управляющего воздействия. С повышением порядка производной резко возрастает сложность ее получения (формирования). Это приводит к тому, что полная инвариантность практически недостижима. При формировании реальных компенсирующих цепей вида
где k 1 – добротность системы по скорости, k 2 – добротность системы по ускорению, T 1 , T 2 – постоянные времени.
Допустим, что передаточная функция соответствует выражению (7). Используя (6) найдем W Э ( р ) для случая введения первой производной от входного воздействия τ 1 pG ( p )
W 3 ( р ) = k i( r i p + 1 )
T 1 p + p - kx T xp
Видно, что условие компенсации скоростной ошибки выразиться формулой τ 1 =1/ k 1 .
При этом выражение (10) примет вид
Wg (P ) = T p + TTT2P- + ••• 1 + т P
W3 (p ) =
к,(т, P +1) = k1 (TP +1)
T 22
1 p 2 p 2
разомкнутый контур изменяет характеристическое уравнение замкнутой системы. Наличие нелинейности и особенности реализации комбинированного управления приводят к тому, что практически невозможно достичь условий абсолютной инвариантности, в реальных системах, а возможно лишь частичное выполнение этих условий.
Выполним синтез следящего электропривода с комбинированным управлением. На рис. 1б,в приведены преобразованные структуры рассматриваемого электропривода, где
W3 ( P ) =
Ф(P) _
w (P f1+ Wn
L W ( p ) J
Выражения, позволяющие для передаточных функций (7-11) найти условия компенсации, приведены в табл. 1. В результате приведенных расчетов можно синтезировать систему, удовлетворяющую требованиям точности. Однако введение компенсирующих сигналов увеличивает колебательность системы. Рассмотрим структуру рис. 1, звенья которой имеют следующие передаточные функции
W g ( P ) = T 1 P;
W ( p ) = k;;
w2 (p )= /k 2 x •
2W p ( Tp + 1 )
Ф
1 - Ф ( P ) 1 - W g ( P ) W 2 ( P )
1+ Wg (P ) W (P )
W 1 ( p ) 1 + W ( p )
;
Из таблицы 1 находится уровень компенсирующего сигнала τ 1 =1/ k 2. В [3] получены формулы, позволяющие определить показатель колебательности M в случае симметричной ЛАХ
Точность следящей системы определяется в основном свойствами в низкочастотной области. По этому влияние компенсирующих сигналов W д ( р ) можно учитывать только в этой области. Инвариантные сигналы не влияют на характер свободного движения системы, поэтому среднечастотная часть формируется без их учета. В низкочастотной области передаточная функция следящих систем может иметь следующий вид
n
I Tj5 - j=g+1 too
1M (M +1)
M + 1
и в случае несимметричной ЛАХ
n
kIT 5
i = 1
m 2 + m4m 2 - 1
Используя выражение (13) для рассматриваемой системы получаем выражение
W ( P ) = PTp+D:
;
W ( p ) = p ( T 1 p + 1 ) ( T 2 p + 1 ).
;
к 1 К 2 Т 5
м 2 + м4м 2 - 1
Таблица 1. Компенсация скоростной ошибки
|
Исходная передаточная функция для низкочастотной области |
Компенсирующая цепь |
Уравнение низкочастотной асимптоты эквивалентной ЛАХ |
Условия компенсации |
|
к 1 |
Т 1 Р |
k 1 T1 ® 2 |
1 Т 1 = k 1 |
|
Р ( т 1 Р + О |
ЧЧ Р 2 Т Р + 1 2 . т 3 Р + 1 |
k т 3 T 1 ® 3 |
т 1 = 1 / k 1 Т 2 = T 1 |
|
k i |
Т 1 * р |
k ( T 1 + T 2 ) ® 2 |
т 1 = 1 / k 1 |
|
Р ( T 1 Р + 1 )( T 2 Р + О |
ЧЧ Р 2 Т Р + 1 2 . т 3 Р + 1 |
____________k 1____________ [ T 1 T 2 + Т 3 ( T 1 + T ) ] ® 3 |
Т 1 = 1/1 т 2 = T 1 + T 2 + т 3 |
|
k 2 Р 2 |
2 2 т 2 Р |
k 2 Т3№* |
т 2 = 1/ k 2 |
|
k- 2 Р 2 ( TР + 1 ) |
т 3 Р + 1 |
k 2 ( T 1 + т 3 ) ^3 |
Использование цифро-аналоговой структуры (рис. 2) электропривода позволяет получить следующие преимущества перед аналоговыми или цифровыми системами: - относительная простота устройства;
-
- высокая гибкость структуры и возможность реализации инвариантных цепей и высокого порядка;
-
- высокая точность и надёжность.
Наиболее целесообразной является структура подчинённого регулирования, когда регулируемый привод (система стабилизации) выполнен в виде аналоговой системы, а регулятор положения (РП) и инвариантные цепи (ИЦ) реализуются программно в управляющем микропроцессоре. Считаем, что аналоговая часть (регулируемый привод) настроена на модульный оптимум и имеет передаточную функцию вида
Wl ( Р ) = --- 7 7 -------
-
2 2T 2 p 2 + 2 Tp + 1
, где К - коэффициент передачи регулируемого электропривода; Т - постоянная времени электропривода.
Структура следящего привода приведена на рис. 1а.
При учете компенсирующей связи изображения для регулируемой величины X(р ) и ошибки системы е(р ) соответственно будут равны
X ( Р ) = Ф ( Р G ( Р )
,
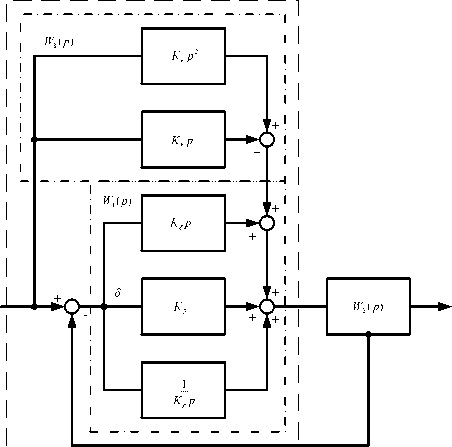
Рис. 2. Функциональная схема цифроаналогового электропривода
В результате применения такой коррекции повышается астатизм системы, а в передаточной функции замкнутой системы появляются форсирующие составляющие в числителе. На рис. 3-3 приведены осциллограммы переходных процессов в электроприводе ( VВЫХ ) на задающий сигнал по скорости ( V ЗАД ) с введением различных инвариантных сигналов:
-
- по первой производной К у ,
-
- по второй производной К У ;
-
- по третьей производной K S .
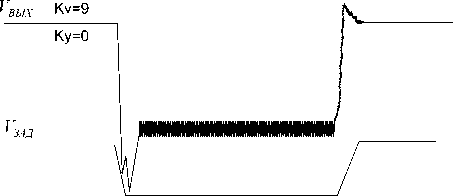
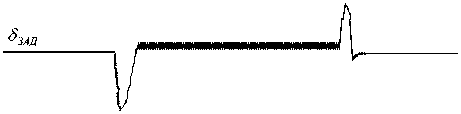
Рис. 3. Переходный процесс по скорости системы с введением первой производной
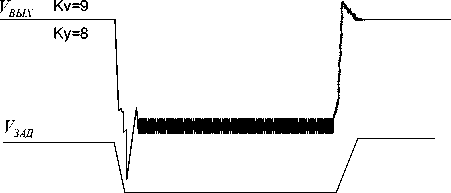
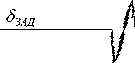

Рис. 4. Переходный процесс по скорости системы с введением первой и второй производных
Моделирование исследуемой системы показало эффективность применения упреждающей коррекции для снижения динамических ошибок без повышения колебательности [4].
Выводы:
-
1. Увеличение количества инвариантных сигналов приводит к снижению амплитуды динамической ошибки;
-
2. Введение сигнала по третьей производной и выше приводит к нарастанию пульсаций скорости;
-
3. Инвариантные цепи повышают колебательность системы, поэтому необходимо контролировать (ограничивать) динамические параметры задающего сигнала;
-
4. Для снижения динамических ошибок системы можно использовать упреждающую коррекцию.
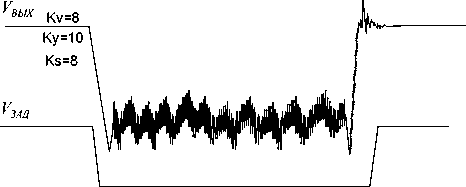

Рис. 5. Переходный процесс по скорости системы с введением первой, второй и третьей производных
Список литературы Анализ и синтез инвариантной системы управления электроприводом
- Менский, Б.М. Принцип инвариантности в автоматическом регулировании и управлении. -М.: Машиностроение, 1972. 360 с.
- Бишоп, Р. Современные системы управления/Р. Бишоп, Р. Дорф. -М.: Изд-во Лаборатория базовых знаний, 2002. 592 с.
- Бесекерский, В.А. Теория систем автоматического регулирования/В.А. Бесекерский, Е.П. Попов. -СПб.: Издательство «Профессия», 2003. 752 с.
- Боровиков, М.А. Расчет быстродействующих систем автоматизированного электропривода и автоматики. -Саратов: изд-во Саратовского университета, 1980. 389 с.
