Анализ и синтез управления авиационной транспортной системой гражданской авиации

Автор: Писаренко Виктор Николаевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Научная жизнь
Статья в выпуске: 4-1 т.16, 2014 года.
Бесплатный доступ
В статье рассмотрен анализ и синтез авиационной транспортной системы с целью ее исследования, выявления центрального звена и определения приоритетных направлений обеспечения безопасности полетов.
Воздушные суда, безопасность полетов, системный подход, сложная система, связь, модель, матрица, человеческий фактор
Короткий адрес: https://sciup.org/148203181
IDR: 148203181 | УДК: 629.7
The analysis and synthesis of control of an air transport system of a civil aviation
In the article the analysis and synthesis of an air transport system is considered with the purpose of its research, detection of a central link and definition of priority directions of safety control of flights.
Текст научной статьи Анализ и синтез управления авиационной транспортной системой гражданской авиации
есть с условиями полета (L-E), человек - с техническим устройством (машиной), то есть с воздушным судном или оборудованием ВС (L-H). Важной составляющей модели является цепочка, затрагивающая схему SHELL - взаимодействие между людьми.
В отечественной литературе [5-7] АТС обычно представляют в виде структуры, показанной на рис. 2.
При системном подходе АТС представляет собой сложную систему, части которой можно рассматривать как системы, закономерно объединенные в единое целое в соответствии с определенными принципами и связанные между собой заданными отношениями. Она включает в себя следующие системы: экипаж - воздушное судно, службу управления воздушным движением, службы обеспечения полетов, каждая из которых может рассматриваться как самостоятельная система. АТС относится к классу интеллектуальных систем, так как составляющие АТС представляют собой человеко-машинные системы.
Произведем решение задачи анализа и синтеза управления АТС в целях исследования индикаторов качества управления интеллектуальной системы АТС, и для этого воспользуемся интервальными и неясными методами [9]. Применение этих методов вызвано несоответствием данных и параметров АТС, которой присущи только статистические данные воздействия АТС на безопасность полетов. Разработаем новый подход к управлению АТС, не нарушая принятой ICAO модели SHEL и дополняя концепцию ICAO [3, 4] по организации управления безопасностью полетов, направленной на снижение факторов риска, и рассмотрении влияния организационных процессов при управлении воздушным судном. В данной статье решение задачи параметрического синтеза управле-
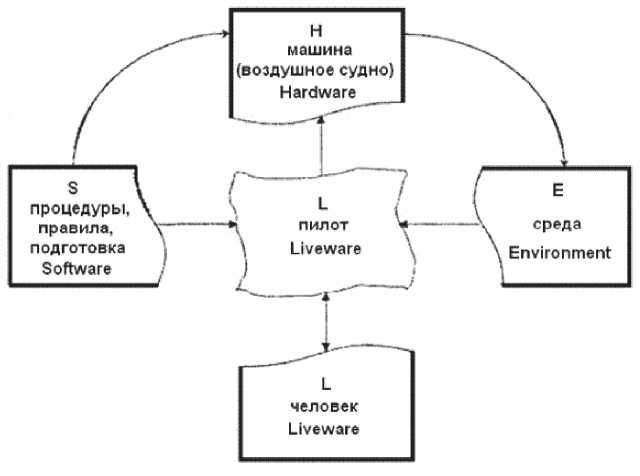
Рис. 1. Компоненты и интерфейсы модели SHELL
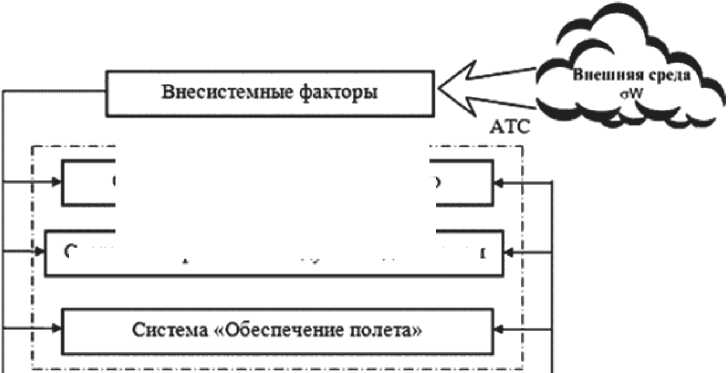
* Система «Управление летной деятельностью»
Рис. 2. Структура ATС
Система экипаж - воздушное судно
Система «Управление воздушным движением
ния интеллектуальной системы АТС с неточными данными выполним с помощью метода интервального анализа [10].
Утверждение задачи.
Примем, что математическая модель АТС представляет собой мультивариантную модель управления неуверенным объектом, показанную на рис. 3.
В соответствии с рис. 2 АТС имеет m входов и m выходов и, таким образом, имеет m каналов. При применении метода синтеза в классе многомерных систем должно выполняться условие: каждый канал должен быть развязан от остальных, независим и автономен. В системе АТС управляемыми переменными являются управление экипажем воздушным судном, управление движением воздушных судов, управление обеспечением полета, управление летной деятельностью и др.
В данном случае Lf(t) — [iij(t) u2(t) Из(0"" ] и jf(t) — [^(t) X2(t) хз(0 ’1'
При исследовании системы АТС, а также при синтезе АТС необходимо учитывать перекрестные связи - влияние на действия экипажа системы управление воздушным движением, системы обеспечение полета, системы управление летной деятельностью и др. (сигнал u 1( t ) воздействует на выход x 2( t ), u 2( t ) воздействует на выход x 1( t ), и т.д.)
Управление АТС выглядит следующим образом
X(t) = ЛХ(0 + BU(t) , (1) где X ( t ) – n мерный вектор состояний;t/(t)- m мерный вектор управляющих воздействий; A и B – интервальные матрицы управления АТС.
Задачей синтеза будем считать определение матрицы интервалов K в уравнении обратной связи
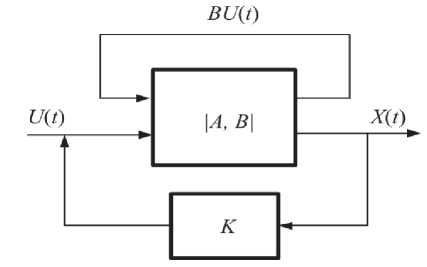
Рис. 3. Модель АТС: векторный входной сигнал, вектор состояния АТС;
A и B – интервальные матрицы управления АТС;

K – матрицы интервалов - отрицательная обратная связь устойчивого управления; BU(t) - вектор-функция управления АТС
= K , (2)
обеспечения желательных динамических свойств закрытой системы АТС, которая представлена в следующем виде
( t ) = - BK =( A - BK ) = D , (3)
где D – интервальная матрица управления закрытой системы АТС.
Интервальную полиномиальную характеристику закрытой системы АТС представим в виде
[d( X )]=det(AI-D)= X n+[d Jn-1 +- + [dn], (4) где [di], i = – интервальный номер полино миальной характеристики.
Алгоритм решения задачи синтеза АТС бу- дет состоять из двух следующих шагов.
Шаг 1 :
Решение параметрической задачи синтеза управления мультивариантного стационарного объекта АТС, принадлежит семейству (1).
Прежде, чем непосредственно перейти к решению задачи синтеза семейства ценностей математической модели (1) рассмотрим математическую модель с установившимися параметрами элементов матриц A и B , т.е. математическую модель следующего вида
( t ) = ( A + ( t ), (5)
где A , B и K – постоянные матрицы.
Для замыкания обратной связи необходимо знать вектор состояний . Последний оценивается с помощью наблюдающих устройств кабины экипажа.
Для модели (5) уравнение обратной связи будет представлено следующим образом
, (6)
где K – матрица отрегулированных параметров, на определение которых ответит решение задачи синтеза для постоянного управления АТС, выполним по методике, предложенной в [11].
Шаг 2 :
Решение параметрической задачи синтеза для мультивариантного управления АТС, базируется на методе обычных параметров и матрицы, найденного выше K как начальное приближение решения задачи синтеза управления путем увеличения колонки матрицы K общих параметров Р :
^^и-
К = : ::
РКт2 - Ктп
В - О
К = К : ::
о - Vi
Вместо выражения (2) запишем
(t).(7)
Характеристику управления полиномиальной модели АТС представленной в виде (7) за- пишем в следующем виде
Параметр Р должен быть равен желательной характеристики полиноминальной модели АТС представленной в виде (4).
Приравнивая идентичные коэффициенты степени X в выражениях (8) и (4), получаем систему линейных алгебраических интервальных уравнений для определения параметра Р .
Рассмотрим уравнения полученной модели, которая имеет вид
[ P ( в i)]= , (9)
где , , - интервальные размеры, за висящие от элементов матрицы A, B и K.
Формальное раскрытие устанавливает систем- ную композицию в следующем виде выражения
[ ( в i )] = .
Согласно субдистрибутивному закону интервальной математики для набора Р имеем:
[P(в)] .(11)
Параметр Р i = ^i найдем из выражения
[ ( i]= .(12)
Найденное значение Р iзаменим в [ P ( в i )]
[ ( i] М [ ( )] .(13)
Таким образом, получен в виде найденного коэффициент желательного характеристическо- го уравнения управления закрытой системы АТС.
Уравнение (13) согласно алгоритму синтеза преобразовываем к виду
i [ ] . (14)
Возможность такого преобразования опреде- лена с помощью действия размещения суммированием [11].
Решение полученной системы (15) дается со следующей теоремой: параметр i, i = имеет решение невырожденной системы линейной алгоритмической вставки только в том случае, когда это представляет решение системы уравнений im . (15)
Также удовлетворяет ограничениям i S( ) , (16)
где m ( q i), m ( H i) – центры и S ( ) 5№) длины интервальных номеров [ ]
В уравнении (16) последовательность параметров i i = найдена при условии минимального значения отрегулированного параметра
Положим, что АТС является асимптотически устойчивой. Изложим некоторые рассуждения касающиеся влияния каналов в терминах передаточных функций. Связь между входом и выходом АТС задана формулой
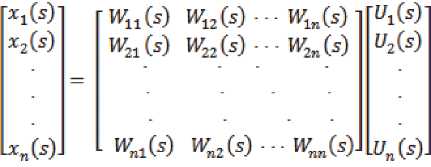
Рассмотрим 1-й выход АТС:
X 1( s ) = W 11( s ) U 1( s )+ … + W 1n( s ) U n( s ).
В АТС 1-й выход определяется 1-м входом (основным входом). Кроме того на 1-й выход оказывают воздействие все остальные входы.
Независимость выходных переменных от других входов, кроме соответствующих входных воздействий, т.е. u 1 ( t ) ^ x 1 ( t ), i = 1. '1 означает, что передаточные функции перекрестных каналов должны обращаться в нуль.
Таким образом, необходимым и достаточным условием автономности каналов является диагональность передаточной матрицы АТС, т.е. должна иметь место зависимость
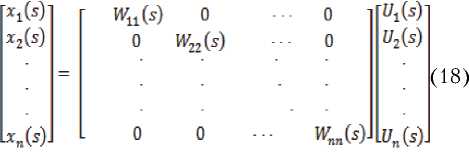
В реальной системе АТС перекрестные связи отличны от нуля и, следовательно, качество работы каждого канала зависит как от свойств собственно канала, так и от характера перекрестных связей.
Задачей синтеза является определение матрицы интервалов K в уравнении обратной связи (2). В программной среде LabView была создана модель определения матрицы К. Зная значение трехмерного вектора состояний X(t) и трехмерного вектора управляющих воздействий U(t), находим трехмерный вектор K.
u(t)
к = —=-—
.
В программной среде задаются численные значения матриц U(t) и X(t), на выходе модели получаем численные значения матрицы интервалов K. Работа модели представлена на рис. 4, а результаты вычисления – на рис. 5.
Таким образом, разработан алгоритмический аппарат, ориентированный на конкретную задачу управления авиационной транспортной системой и обеспечения приемлемого уровня безопасности полетов гражданской авиации.
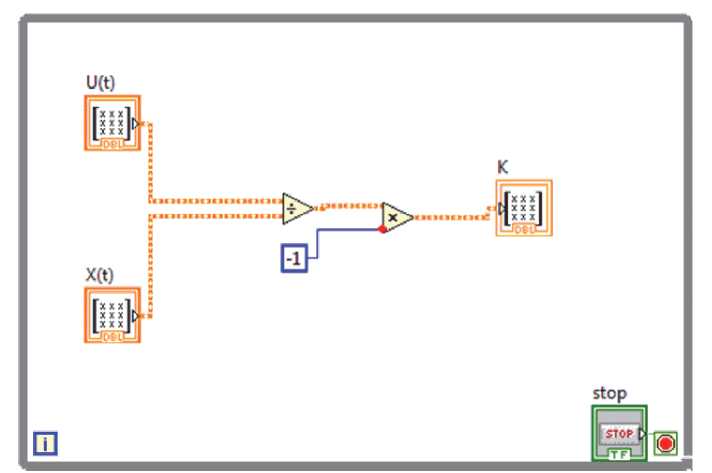
Рис. 4. Блок-диаграмма модели
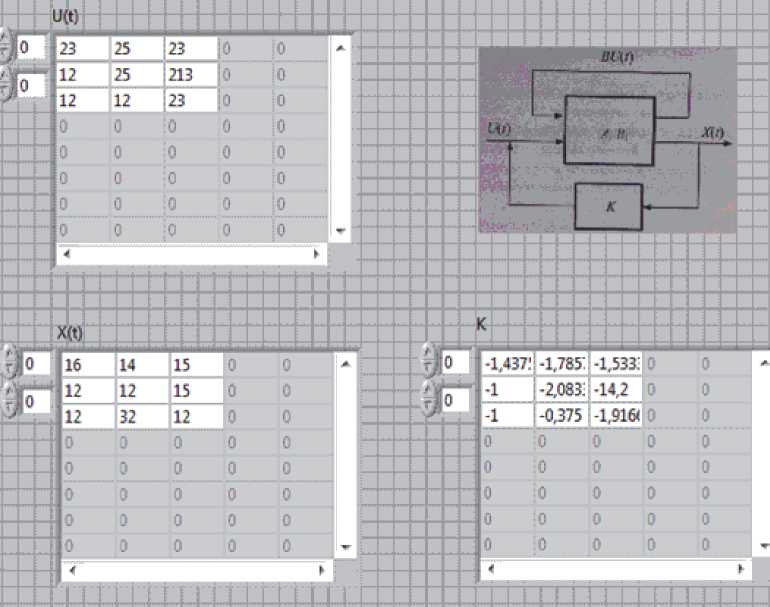
Рис. 5. Лицевая панель модели в программной среде LabView
Список литературы Анализ и синтез управления авиационной транспортной системой гражданской авиации
- ICAO Doc 9683 Руководство по обучению в области человеческого фактора/ICAO, 1998, добавлено 31 января 2011.
- ICAO Doc 9824 Advisory Circular AC 145-2(0) Human Factors Guidelines for Aircraft Maintenance/ICAO, 2003, November 2011.
- ICAO Doc 9859 AN/460 Руководство по обеспечению безопасности полетов (РУБП)/ICAO, 2009.
- ICAO Doc 9859 AN/474 Safety Management Manual (SMM) [Текст]/ICAO, 2012, p. 211.
- Сакач Р.В., Зубков Б.В., Давиденко М.Ф. и др. Безопасность полётов [под ред. Р.В. Сакача]. М.: Транспорт, 1989. 239 с.
- Жулев В.И., Иванов B.C. Безопасность полетов летательных аппаратов (Теория и анализ). М.: Транспорт, 1986. 224 с.
- Лейченко С. Д., Малишевский А. В., Михайлик Н. Ф. Человеческий фактор в авиации. Монография. С-Пб-Кировоград: ООО “КОД”, 2006. 480 с.
- Писаренко В.Н. Обеспечение безопасности полетов при управлении воздушным движением. Самара: СГАУ, 2009. 86 с.
- Жолен Л., Кифер М., Дидри О., Вальтер Е. Прикладной интервальный анализ. М.: Ин-т исследования компьютера, 2007. 468 с.
- Ашимов А.А., Суздуков Д.Ж. Идентификация обычных параметрических методов. Справочник по теории автоматического управления. М.: Шанс, 1987. С 263-271.
- Хлебалин Н.А. Модальное управление предприятиями с сомнительными интервальными параметрами/Симпозиум “Синтез управления системами”, теория и практика. Новосибирск, 1991. С. 168-173.
