Анализ эффективности применения средств увода с орбиты малых космических аппаратов

Автор: Г.П. Аншаков, А.В. Крестина, И.С. Ткаченко
Журнал: Космические аппараты и технологии.
Рубрика: Ракетно-космическая техника
Статья в выпуске: 2, 2020 года.
Бесплатный доступ
В настоящее время для увода малых космических аппаратов с орбиты предлагается использование различных способов. В работе проведен анализ наиболее реализуемых и перспективных из них. Поставлена задача оценки эффективности системы увода малого космического аппарата с орбиты, в рамках которой сформированы критерий и основные показатели эффективности с учетом проектных особенностей. В качестве методологической основы оценки эффективности использовался метод относительной интегральной оценки. С помощью разработанного алгоритма расчета коэффициентов интегральной относительной оценки для каждого способа увода определен наиболее эффективный вариант построения системы при заданных коэффициентах приоритета и с учетом накладываемых проектных ограничений. Для анализа эффективности были выбраны бестопливные средства увода и три типа двигательных установок – электрореактивная, твердотопливная и жидкостная. Анализ эффективности был проведен для аппаратов с различными массовыми и целевыми характеристиками, результатом является выбор типа системы увода и расчет ее параметров. Показана зависимость способа увода от целевого назначения аппарата, высоты и наклонения орбиты его функционирования, а также от требований, предъявляемых к массе, стоимости и другим проектным параметрам.
Малый космический аппарат, космический мусор, система увода с орбиты, оценка эффективности, метод относительной интегральной оценки
Короткий адрес: https://sciup.org/14117435
IDR: 14117435 | УДК: 629.78 | DOI: 10.26732/j.st.2020.2.02
Analysis of the effectiveness of the de-orbiting devices for small satellite
At present, the use of various methods is proposed for the de-orbit of small satellite, and the most feasible and promising of them are analyzed. The task of evaluating the effectiveness of the de-orbiting system for small satellite is set, in the framework of which a criterion and basic performance indicators are formed taking into account design features. As a methodological basis for evaluating the effectiveness, the method of relative integral assessment was used. Using the developed algorithm for calculating the coefficients of the integral relative assessment for each de-orbiting method, the most effective option for constructing the system isdetermined for given priority coefficients and taking into account the imposed design restrictions. For the analysis of efficiency, fuel-free de-orbiting devices and three types of propulsion systems were chosen – electric propulsion engine, solid rocket motor and liquid engine. Efficiency analysis was carried out for devices with various mass and target characteristics, the result is the choice of the type of de-orbiting system and the calculation of its parameters. The dependence of the de-orbiting device on the purpose of the spacecraft, the altitude and inclination of the orbit of its functioning, as well as on the requirements for mass, cost and other design parameters is shown.
Текст статьи Анализ эффективности применения средств увода с орбиты малых космических аппаратов
Проблема образования космического мусора в последние годы встает крайне остро в связи с большим количеством малых космических аппаратов (МКА), выводимых на низкие околоземные орбиты (НОО). В скором будущем на этих орбитах будут развернуты многоспутниковые группировки, количество аппаратов в которых будет достигать нескольких тысяч.
Межведомственным координационным комитетом по космическому мусору были определены две наиболее важные области околоземного пространства, где время существования космических аппаратов (КА) не должно превышать 25 лет [1]. Этими областями являются наиболее «засоренные» НОО и геосинхронные орбиты. Однако развертывание многоспутниковых группировок выходит за пределы ожидаемого количества КА на орбите Земли.
Ограничение длительного существования КА на НОО требует на начальном этапе проектирования включать в состав бортовых систем аппарата средство для его увода с орбиты по истечению срока активного существования [2], что является отдельной сложной научнотехнической задачей, так как требуется учитывать особенности функционирования каждого спутника. В связи с этим возникает задача оценки эффективности системы увода МКА с орбиты функционирования. Ее решение становится необходимым еще и по той причине, что потеря управления над вышедшим из строя спутником может являться угрозой для функционирования других аппаратов на орбите из-за возможного столкновения.
1. Обзор средств увода малых космических аппаратов с орбиты
Во время исследования был проведен анализ предлагаемых на настоящий момент методов борьбы с проблемой образования космического мусора, которая получила широкое распростране- ров [3–12]. Преимущества и недостатки различ-ние в работах отечественных и зарубежных авто- ных способов увода приведены в табл. 1.
Таблица 1
Преимущества и недостатки способов увода с орбиты
|
Тип системы уводы |
Преимущества |
Недостатки |
|
|
к m s R к о н о о ю о к m S о о cd К |
Тросовая система |
|
|
|
Аэродинамическая система |
|
|
|
|
Солнечный парус |
|
1) Уязвимость к микрометеоритам. 2) Использование на орбитах ниже 2000 км невозможно. |
|
|
к m S к о к m S < |
Жидкостный ракетный двигатель малой тяги (ЖРД МТ) |
|
|
|
Твердотопливный ракетный двигатель малой тяги (ТРД МТ) |
|
|
|
|
Электрореактивная двигательная установка (ЭРДУ) |
|
|
|
Наибольшее количество МКА функционируют на орбитах в диапазоне от 300 до 800 км, где момент светового давления не оказывает существенного влияния на движение аппарата, в связи с чем использование солнечного паруса на орбитах ниже 800 км не представляется возможным. Поэтому по результатам анализа данных табл. 1 были выделены наиболее перспективные способы увода МКА различной массы с орбиты – аэродинамическая [13] и тросовая системы, ЭРДУ, ЖРД МТ и ТРД МТ.
2. Постановка задачи
Оценка эффективности системы увода МКА с орбиты требует формирования системы критериев и показателей эффективности, которые представляют собой совокупность важнейших параметров, характеризующих объект с различных сторон и учитывающих его функциональные особенности [14].
При формировании показателей из множества возможных параметров необходимо учитывать существенность показателя для рассматриваемого типа объекта, а также количественную определяемость показателя.
На основе анализа возможных способов увода КА с орбиты определены следующие показатели эффективности системы увода МКА, приведенные к безразмерным относительным величинам с помощью нормирования:
-
1) Относительное время увода, с:
ˆ T у
T сущ ,
где Т у – время увода МКА в плотные слои атмосферы при использовании системы увода, час; Т сущ – время баллистического существования МКА при естественном спуске с орбиты функционирования за счет силы аэродинамического сопротивления, час.
-
2) Относительная масса системы увода, кг:
M l = — M
M с
'КА + М с ’
где М с - масса системы увода МКА с орбиты, которая включает в себя суммарную массу конструкции всех элементов и подсистем, а также массу топлива в случае использования двигательных установок (ДУ), кг; М КА – масса МКА, кг.
-
3) Удельное энергопотребление системы увода, Вт:
W W = —=- W СЭП
,
где W , - потребляемая системой увода МКА с орбиты мощность, необходимая на включение и функционирование системы, Вт; W СЭП - мощность системы электропитания МКА, Вт.
-
4) Технологичность системы увода S - условный показатель, отражающий конструктивную сложность изготовления элементов и системы увода в целом. Для определения показателя технологичности используется метод экспертных оценок. Обобщенный показатель технологичности системы состоит из частных показателей [15]: S 1 – показатель, характеризующий трудоемкость изготовления конструкции; S 2 - показатель, характеризующий степень использования стандартных и нормализованных деталей; S 3 - показатель, характеризующий сложность выполнения работ по техническому обслуживанию изделий, в том числе требования по квалификации и составу персонала для проведения этих работ; S 4 – показатель, характеризующий сложность экспериментальной отработки.
Далее производится расчет числовых значений каждого из частных показателей технологичности для анализируемых видов систем:
S j = S j ср • W j , (4)
где S j ср - средний балл по j -му показателю; W j - весовой коэффициент важности j -го частного показателя технологичности.
Для определения обобщенного показателя технологичности необходимо суммировать частные показатели:
n
$ = £ S
j = 1
j ’
где S j - нормируемый j -ый показатель оценки технологичности; n – общее число показателей.
-
5) Относительная стоимость системы уво
да:
С
С = С^, (5)
CКА где Сс - стоимость изготовления, сборки и испытаний системы увода МКА с орбиты, руб.;
№ 2 (32) 2020 Том 4
С кА - стоимость создания, выведения и эксплуатации МКА, руб.
-
6) «Надежность» системы увода R - обобщенный показатель, отражающий возможность включения системы увода МКА с орбиты, вероятность ее безотказной работы и выполнения целевой функции. Состоит из частных показателей оценки «надежности» системы: R j - показатель, характеризующий количество подсистем в составе системы увода; R 2 – показатель, характеризующий условия включения системы; R 3 – показатель, характеризующий длительность хранения и стабильность рабочего тела; R 4 - показатель, характеризующий токсичность рабочего тела.
Назначение частных показателей «надежности» проводится экспертами. Далее производится расчет числовых значений каждого из частных показателей для анализируемых видов систем:
Ri= Ri ср • Wi, (7)
где R i ср - средний балл по i -му показателю; W i - весовой коэффициент важности i -го частного показателя «надежности».
Для определения обобщенного показателя необходимо суммировать частные показатели:
k
R = Z Ri,
= 1
где R i - i -ый частный показатель оценки «надежности»; k – общее число частных показателей.
Весовые коэффициенты важности показателей технологичности и «надежности» W j и W i назначаются методом экспертных оценок с учетом условий:
nk
Z Wj = 1; Z Wi=1.
j = 1 i = 1
Ограничимся рассмотрением шести указанных выше показателей в задаче анализа эффективности системы увода, так как они достаточны и отражают основные характеристики КА и их систем.
Критерий эффективности системы увода МКА с орбиты можно представить в виде:
E = E(T,М,W,5,С,R)T ^ max. (7)
Зависимость между показателями эффективности в явном виде установить крайне сложно из-за их различной физической сущности. Это определило выбор метода анализа эффективности системы – метода относительной интегральной оценки. Таким образом, задачу выбора средства увода МКА и оценки его эффективности можно сформулировать как_задачу максимизации критерия эффективности E .
-
3. Метод относительной интегральной оценки
Метод относительной интегральной оценки объединяет в себе свойства метода свертки и метода выделения главного критерия, поэтому он может использоваться при выборе состава системы увода МКА с орбиты для оценки эффективности на ранних этапах проектирования [16]. Сравнение одной альтернативы с другой ведется на основе совокупного коэффициента относительной интегральной оценки, что является преимуществом данного метода [17].
Для реализации метода интегральной относительной оценки эффективности системы увода МКА с орбиты необходимо определить значимость показателей, то есть величины их коэффициентов приоритета (коэффициенты весомости), что является определенным недостатком, так как процесс их поиска содержит субъективную составляющую (мнение экспертов, лица, принимающего решения (ЛПР) и т. д.). В данной задаче коэффициенты приоритета показателей эффективности системы a j назначаются ЛПР Конечной целью оценки является минимизация времени увода, соответственно показатель относительного времени увода аппарата является превалирующим. Это учитывается на этапе формирования комбинации коэффициентов приоритета: a j = 0,25; a 2 = 0,15; α 3 = 0,15; α 4 = 0,15; α 5 = 0,15; α 6 = 0,15.
За определением приоритетов показателей следует непосредственно расчет коэффициентов интегральной относительной оценки (КИО) системы увода МКА с орбиты. Для показателей, значения которых при повышении эффективности системы уменьшаются ( T , M , W , S , C ), КИО определяется по формуле:
K = Ej баз . (8)
j E j
Для показателей, значения которых при повышении эффективности системы увеличиваются ( R ), КИО определяется по формуле:
E
K j = j . (9)
E j баз
Совокупный коэффициент интегральной относительной оценки системы определяется по сумме М показателей, взвешенных по их значимости с помощью коэффициентов приоритета [17]:
M
I Ka.
K ИО = jM ----. (10)
I a
= 1
-
4. Алгоритм анализа эффективности системы увода малых космических аппаратов с орбиты
Выбранные для анализа эффективности средства увода подходят для применения на МКА массой от 1 до 1000 кг, функционирующих на орбитах от 300 до 800 км и не оснащенных двигательных установкой [19].
Для аппаратов нано- и микро- класса при формировании альтернативных вариантов построения системы увода необходимо определить наличие системы ориентации и стабилизации на борту аппаратов, которая в большинстве случаев ограничивается пассивными средствами. В связи с этим логично формирование альтернатив для систем увода подобных аппаратов на базе пассивных (бестопливных) средств (табл. 1). При этом необходимо учитывать мощность системы энергопитания (СЭП) на борту таких спутников. В случае если рассматриваемый МКА оснащен системой управления движением и, соответственно, активной системой ориентации и стабилизации для анализа эффективности выбираются двигательные установки – активные (топливные) средства увода (табл. 1).
Однако после длительного срока существования на орбите может произойти отказ или деградация бортовых систем спутника, что влияет на вероятность корректной выдачи двигателем тормозного импульса в нужном направлении. Для этого в анализе эффективности рассматриваются также варианты построения системы увода на базе пассивных методов: аэродинамическая и тросовая системы.
При формировании группы альтернативных вариантов построения системы увода МКА с орбиты учитываются следующие факторы:
-
• альтернативы имеют одинаковые цели;
-
• показатели экономической эффективности базируются на независимой от года создания и развертывания системы единой шкале цен;
-
• приоритеты всех показателей инварианты для всех альтернатив.
После описания альтернативных вариантов построения системы увода определяются основные проектные параметры систем увода [14], показатели эффективности системы увода и КИО по каждому показателю и в совокупности. Важным шагом алгоритма является оценка запасов мощности СЭП для включения того или иного варианта построения системы. В случае недостатка энергии эта конфигурация исключается из рассмотрения, так как невозможно обеспечить функционирование системы увода. Выбор рационального варианта построения системы увода МКА с орбиты осуществляется из условия максимума
Том 4
совокупного КИО. Структурная схема алгоритма да становится возможным создание проектной анализа эффективности представлена на рис. 1. модели аппарата, оснащенного выбранной систе-После выбора варианта построения системы уво- мой увода.
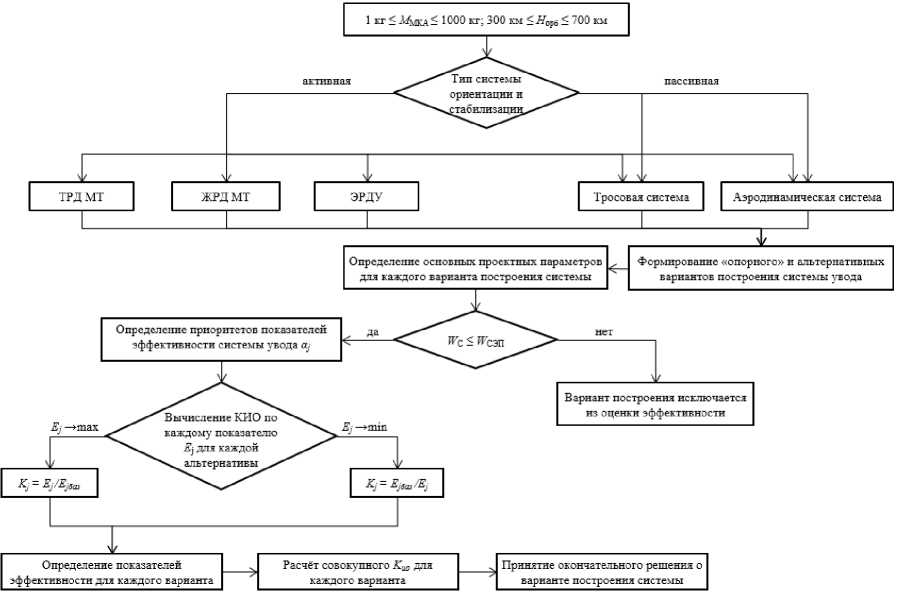
Рис. 1. Структурная схема алгоритма оценки эффективности системы увода МКА
5. Апробация разработанного алгоритма
Для апробации алгоритма были выбраны пять МКА, характеристики которых представлены в табл. 2 [18]. Расчетный срок баллистического существования (СБС) каждого аппарата при фиксированном уровне солнечной активности 1·10-20 Вт/(м2·Гц) превышает 25 лет, что подтверждает необходимость оснащения средствами увода с орбиты.
Таблица 2
Основные параметры рассматриваемых МКА
|
Название МКА |
Назначение |
Страна изготовления |
Орбита функционирования |
Масса, кг |
Элементы (тип) системы управления движением |
Среднее расчетное значение СБС, лет |
Мощность СЭП, Вт |
|
|
Высота, км |
Наклонение, град. |
|||||||
|
CanX-7 |
Научные исследования |
Канада |
635 |
97,4 |
3,5 |
Магнитометры (пассивная) |
51 |
8 |
|
АИСТ-1 |
Научные исследования |
РФ |
625 |
82,4 |
40,0 |
Магнитометры (пассивная) |
66 |
12 |
|
TET-1 |
Отработка технологий |
Германия |
510 |
97,8 |
120,0 |
Двигатели-маховики (активная) |
30 |
70 |
|
SciSat-1 |
Научные исследования |
Канада |
650 |
73,9 |
260,0 |
Двигатели-маховики (активная) |
71 |
110 |
|
АИСТ-2Д |
Дистанционное зондирование Земли |
РФ |
490 |
97,3 |
530,0 |
Двигатели-маховики (активная) |
28 |
285 |
В качестве «опорного» (О) и пяти альтернативных вариантов для аппаратов «CanX-7» и «АИСТ-1» были сформированы шесть конфигураций аэродинамической (АС) и тросовой (ТС) системы с различными геометрическими параметрами, представленными в табл. 3.
Для оценки эффективности системы увода с орбиты аппаратов «TET-1», «SciSat-1» и «АИСТ-2Д» в качестве «опорного» и альтернативных вариантов построения помимо пассивных способов увода выбраны шесть ДУ, тип и параметры которых представлен в табл. 4 [19–23].
Таблица 3
Варианты построения системы увода МКА нано- и микро-класса с орбиты
|
МКА |
Вариант построения системы |
Способ увода |
Длина троса, м / Диаметр надувного баллона, м |
Толщина троса, м |
|
CanX-7 |
О |
АС |
0,4 |
|
|
А1 |
АС |
1,0 |
||
|
А2 |
АС |
2,5 |
||
|
А3 |
АС |
4,0 |
||
|
А4 |
ТС |
500 |
1,0∙10-5 |
|
|
А5 |
ТС |
1000 |
1,0∙10-5 |
|
|
А6 |
ТС |
500 |
3,5∙10-5 |
|
|
А7 |
ТС |
1000 |
3,5∙10-5 |
|
|
АИСТ-1 |
О |
АС |
1,0 |
|
|
А1 |
АС |
2,0 |
||
|
А2 |
АС |
4,0 |
||
|
А3 |
АС |
8,0 |
||
|
А4 |
ТС |
1000 |
1,6∙10-5 |
|
|
А5 |
ТС |
2000 |
1,6∙10-5 |
|
|
А6 |
ТС |
1000 |
7,0∙10-5 |
|
|
А7 |
ТС |
2000 |
7,0∙10-5 |
Таблица 4
Варианты построения системы увода МКА с орбиты
|
Вариант построения системы |
Способ увода |
Рабочее тело |
Тип двигателя |
Удельный импульс, м/с |
Тяга, Н |
Потребляемая мощность, Вт |
Длина троса, м / Диаметр надувного баллона, м |
Толщина троса, м |
|
О |
ЭРДУ |
Ксенон |
ПлаС-34 |
13243 |
0,03 |
70 |
||
|
А1 |
АС |
Азот |
20 |
|||||
|
А2 |
АС |
Азот |
40 |
|||||
|
А3 |
ТС |
3000 |
1,5∙10-4 |
|||||
|
А4 |
ТС |
5000 |
1,5∙10-4 |
|||||
|
А5 |
ЭРДУ |
Ксенон |
ПлаС-40 |
17168 |
0,04 |
100 |
||
|
А6 |
ЖРД МТ |
НДМГ / АГ |
17Д58Э |
2688 |
13,30 |
27 |
||
|
А7 |
ЖРД МТ |
Кислород / водород |
Океан-О |
4071 |
30,00 |
28 |
||
|
А8 |
ТРД МТ |
ПБ/ПА |
755 NsMotor |
1835 |
37,00 |
42 |
||
|
А9 |
ТРД МТ |
ПБ/ПА |
STAR 4G |
2717 |
25,80 |
16 |
- |

KI/IEАППАРАТЫ 1/1
Том 4
Рассмотрим пример применения разработанного алгоритма для МКА «TET-1».
СБС аппарата, а также время его увода с помощью АС определяется по формуле [24]:
T = 2 M КА ₽. x (e, z), у 3PmСхsM ь где
3 e L 7 e 5 ee
X (e, z) = 1 + — +
4 I 616
1 ( 11 e 3 3 ) V з 1
+ 1 +1+ + O e ,
2 z I 12 4 z 4 z2 J I
,
где M КА - масса КА, кг; р м - плотность атмосферы на перигее орбиты (ГОСТ 25645.101-83), кг/м3; 1 0 ( z ) - функция Бесселя порядка к = 0 и 1 и аргумента z = ae[H p ; e = 0 - эксцентриситет орбиты; S м - площадь , миделя, м2; μ - гравитационная постоянная, м3∙с-2; C x = 2…2,3 - коэффициент аэродинамического сопротивления; a - большая полуось орбиты, м.
Время увода МКА с тросовой системой определяется по следующей зависимости [24]:
T = , , .M\ ----i- ( r 6 - r ?I (12)
у 12 L 2 B M R 6 cos 2 a cos 2 X 1 '
где cos2 X = ^ {б + 2 cos 2 i + 3 cos [2 (i - ф)] + +2 cos 2ф + 3 cos [2 (i - ф)]}, где i - наклонение орбиты, град; ф = 11 - наклонение оси магнитного поля Земли, град; L - длина троса, м; Лт = Lруд/5Т - сопротивление троса, Ом; Sт – площадь сечения троса, м2; α - угол между осью троса и местной вертикалью, принимаемый равным 0°; M = MКА + MЭдКТС - общая масса МКА с системой, кг; Bм - величина магнитной индукции на геомагнитном экваторе, Тл; rj - начальная высота орбиты, м; r2 - конечная высота орбиты, м.
Для МКА, оснащенного ДУ, время увода с орбиты определяется с помощью соотношения:
Т у =( M Т / Т Т ) I уд , (13)
где I уд - удельный импульс, м/с; F г - сила тяги двигательной установки, Н; M т – масса топлива, кг:
M Т = M КА [ 1 - exp ( -A VJI уд ) ] , (14)
где А V - приращение характеристической скорости для перехода с начальной орбиты на конечную, м/с:
А V = V орб
где 0 * у = 0...3 - угол входа МКА в плотные слои атмосферы, град; Т орб = уУ—^— - скорость движения аппарата по круговой начальной орбите ради- r (0) r (0)
уса r ( 0), м/с; ~ =----=-- радиус условной
R атм R З + 150
границы атмосферы, м.
Затем определяем массу системы для каждого варианта построения, которая определяется путем суммирования масс основных подсистем и рабочего тела.
Масса аэродинамической системы увода определяется следующим образом:
M асу = М Ау + М сн , (16)
где М АУ = М об + М КХ - масса аэродинамического устройства, включающая массу надувной оболочки М об = р о V o и массу контейнера хранения М КХ = р КХ к o V o , кг; p o - плотность материала оболочки, кг/м2; V o ~ S об 5 ~ 4п r 25 - объем оболочки, м2; k o = 0,04…0,06 – статистический коэффициент складывания; 5 - толщина оболочки, м; р КХ - плотность материала контейнера хранения, кг/м2; S об – площадь оболочки, м2; М СН = М СП + М ГГ + М КВ - масса системы наддува, кг; М СП = γ СП · М ГГ – масса системы подачи газа, кг; γ СП = 0,4 – удельная массовая характеристика системы подачи газа [10]; М ГГ - масса газогенератора, определяется характеристиками выбранного прототипа, кг.
Масса контроллера включения М КВ по статистическим данным не должна превышать 7 % от массы газогенератора.
Масса ТС определяется следующим образом:
M эдктс = М ср + М эдт , (17)
где М СР = 0,02· М КА – масса системы развертывания (по статистическим данным не превышает 2 % от массы КА [7]), кг; УTfЭтJ = pTV = рт А -р Т -у - масса троса, кг; р т - плотность материала электродинамического троса, кг/м2; S T = п d T /4 - площадь сечения электродинамического троса, м2; L т - длина электродинамического троса, м. Как правило, для космических тросов используется алюминий, который имеет удельное сопротивление 27,4 нОм·м и плотность 2700 кг/м3.
Для расчета массы ДУ на этапе проектирования можно использовать следующие зависимости:
M ЭРДУ = p ' M т ,
M жрдмт = q ' M т , (18)
M ТРД МТ = r ' M т, где Mт - масса топлива, рассчитываемая по формуле (12), кг; p = 1,3^1,5 - статистический ко- эффициент, учитывающий массу конструкции и элементов ЭРДУ; q = 1,4 - статистический коэффициент, учитывающий массу конструкции и элементов ЖРД МТ; r = 2,3 - статистический коэффициент, учитывающий массу конструкции и элементов ТРД МТ.
Стоимость создания системы увода может быть определена путем суммирования стоимости изготовления (затраты на создание, испытания и работы по сборке) и стоимости материалов и топлива:
С С = С И + С М , (19)
где С И - стоимость изготовления системы, С М - стоимость материалов для изготовления системы.
Стоимость изготовления системы зависит от трудоемкости, которая характеризуется временем, затрачиваемым на изготовление, сборку и испытания изделия. Суммируя время определенных операций, может быть определена общая трудоемкость в нормо-часах. При проектировочном расчете можно руководствоваться статистическими данными о трудоемкости изготовления изделия:
СИ = МРОТ • с, (20)
где МРОТ – минимальный размер оплаты труда, руб.; c – количество нормо-часов, необходимых для изготовления системы увода, н.ч. [25].
Стоимость материалов и топлива для аэродинамической системы увода определяется формулой:
С АС = С О + С КХ + С Г , (21)
где С Г = с Г • m Г - стоимость газа для наполнения надувного баллона, руб.; c Г – удельная стоимость одного килограмма газа, руб./кг; m Г – масса газа, кг; С О = с М • S НБ - стоимость материала оболочки, руб.; С М - стоимость одного квадратного метра материала оболочки, в качестве которого в проектах-аналогах используются майлар, каптон и алюминий, руб./м2; С КХ = с МХ • M КХ - стоимость контейнера хранения оболочки, руб.; c М КХ – стоимость одного килограмма материала контейнера, руб./кг.
Стоимость материалов для изготовления ТС определяется по формуле:
ТС
М
= С +С ЭДТ + СР ,
где С Эдт = с м • M Эдт - стоимость материалов для изготовления электродинамического троса, руб.; С ср = c СР • МСР - стоимость материалов для изготовления системы развертывания, руб; c МСР - удельная стоимость 1 кг материала изготовления троса или системы развертывания, руб./кг [7].
Стоимость ДУ определяется путем суммирования статистической стоимости двигателя и произведения удельной стоимости 1 кг топлива на массу требуемого для увода топлива.
Мощность, необходимая на развертывание аэродинамической системы увода МКА с орбиты, определяется мощностью выбранного газогенератора. Мощность, необходимая на включение ДУ, определяется характеристиками выбранного прототипа.
Мощность, необходимую на развертывание ТС, можно определить как:
W = IU = 12 R = U2/ R, (23)
ЭДКТС где U - напряжение в электродинамическом тросе, В; R = руд LT/ST - сопротивление электродинамического троса, определяемое по зависимости, Ом; ρуд – удельное сопротивление материала электродинамического троса, Ом·м.
Результаты расчета проектных параметров системы увода для МКА «TET-1» с помощью вышеприведенных формул представлены в табл. 5.
Таблица 5
Основные проектные параметры системы увода
|
Вариант |
M С , кг |
W С , Вт |
T у , ч |
C С , тыс. руб. |
C КА , тыс. руб. |
|
О |
1 |
70 |
113,91 |
4720 |
200 000 |
|
А1 |
7 |
50 |
172,35 |
1180 |
|
|
А2 |
15 |
70 |
43,09 |
1376 |
|
|
А3 |
3 |
12 |
7444,92 |
1659 |
|
|
А4 |
4 |
7 |
4470,99 |
1998 |
|
|
А5 |
1 |
100 |
85,51 |
6336 |
|
|
А6 |
6 |
27 |
3,80 |
7471 |
|
|
А7 |
4 |
40 |
1,69 |
7977 |
|
|
А8 |
15 |
42 |
1,35 |
4841 |
|
|
А9 |
10 |
16 |
0,98 |
5161 |
Таблица 6
Значения показателей эффективности систем увода МКА «TET-1»
|
Вари-ант |
T ˆ |
M ˆ |
W ˆ |
S |
C ˆ |
R |
|
О |
0,00044444 |
0,0097 |
1,00 |
4,94 |
0,0236 |
5,05 |
|
А1 |
0,00067243 |
0,0583 |
0,71 |
4,90 |
0,0059 |
3,56 |
|
А2 |
0,00016811 |
0,1135 |
1,00 |
4,99 |
0,0069 |
3,56 |
|
А3 |
0,02904736 |
0,0209 |
0,17 |
5,66 |
0,0083 |
3,34 |
|
А4 |
0,01744416 |
0,0313 |
0,10 |
5,78 |
0,0100 |
3,34 |
|
А5 |
0,00033362 |
0,0120 |
1,43 |
5,04 |
0,0317 |
5,39 |
|
А6 |
0,00001481 |
0,0491 |
0,39 |
2,94 |
0,0374 |
3,02 |
|
А7 |
0,00000661 |
0,0336 |
0,57 |
2,98 |
0,0399 |
3,48 |
|
А8 |
0,00000528 |
0,1128 |
0,60 |
6,42 |
0,0242 |
6,28 |
|
А9 |
0,00000382 |
0,0797 |
0,23 |
6,52 |
0,0258 |
6,42 |
Результаты расчета показателей эффективности для МКА «TET-1» представлены в табл. 6. Результаты расчета для рассматриваемых аппаратов представлены в графическом виде на рис. 2–6,

Рис. 2. Гистограмма КИО систем увода МКА «TET-1»
где вариант построения системы, обладающий максимальным совокупным КИО, является наиболее эффективным.
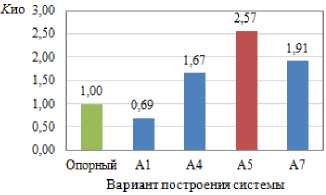
Рис. 3. Гистограмма КИО систем увода МКА «CanX-7»
Том 4
6. Результаты и обсуждение
Таким образом, анализ гистограмм показывает, что наиболее эффективными вариантами построения для выбранных аппаратов являются: МКА «CanX-7» - ТС с длиной троса 1 км и толщиной 10 мкм, время увода при этом составляет не более девяти месяцев; МКА «АИСТ-1» – АС с диаметром надуваемого баллона 4 м, время увода составляет не более года; МКА «TET-1» – ТРД МТ «STAR 4G», время увода при этом составляет не более одного часа; МКА «SciSat-1» – ЖРД МТ «Океан-О», время увода – не более 4 часов; МКА «АИСТ-2Д» - ТРД МТ «755 NsMotor», время увода с орбиты – не более 5 часов.
В результате работы были сформированы рекомендации по оснащению МКА системами увода в зависимости от массовых и энергетических характеристик спутника. Предлагаемая классификация представлена в табл. 7.

Рис. 4. Гистограмма КИО систем увода МКА «АИСТ-1»
Таблица 7
Классификация средств увода для МКА
|
Класс аппарата |
Масса, кг |
Тип системы ориентации |
Мощность системы энергопитания, Вт |
Предлагаемое средство увода |
|
Нанокласс |
1-10 |
Пассивная |
5-10 |
ТС / АС |
|
Микрокласс |
10-100 |
Пассивная |
10-15 |
АС |
|
Малые |
100-250 |
Активная |
50-100 |
ТРД МТ |
|
Малые |
250–500 |
Активная |
100-200 |
ЖРД МТ |
|
Малые |
500-1000 |
Активная |
250–450 |
ТРД МТ / ЖРД МТ |
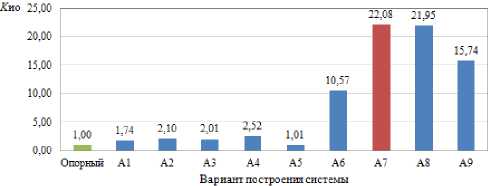
Рис. 5. Гистограмма КИО систем увода МКА «SciSat-1»

Рис. 6. Гистограмма КИО систем увода МКА «АИСТ-2Д»
В зависимости от параметров орбиты функционирования, массы и запасов энергии на борту МКА, в качестве средства увода рекомендуется рассматривать определенные типы систем. В случае разработки системы увода для наноспутников возможно рассмотрение пассивных способов увода – тросов и надуваемых баллонов, так как для аппаратов с такой малой массой требуется минимальная мощность. Возможность использования ТС для аппаратов нано-класса подтверждает эксперимент эстонского студенческого спутника «ESTCube-1» [26]. Установка на спутники микро-класса тросовой системы нерациональна, так как для эффективного увода необходим трос с такими характеристиками, которые требуют большего количества энергии, чем может обеспечить система энергопотребления аппарата. Это приводит к рассмотрению только аэродинамической системы увода с различными диаметрами надуваемого баллона. Как можно увидеть из формулы (9), время увода для такого способа прямо зависит от площади аэродинамического устройства.
Для аппаратов с массой более 100 кг и активной системой ориентации наиболее эффективным способов увода являются ДУ. Так как целью оценки эффективности заключалась в минимизации времени увода, для аппаратов подобного типа этого можно добиться с помощью ДУ с максимальной тягой, что делает ЭРДУ наиболее неподходящими для задачи уменьшения СБС в виду их большой потребляемой мощности и низкого уровня тяги по сравнению с другими видами ДУ. Таким образом, в рамках данного исследования наиболее предпочтительными являются твердотопливные и жидкостные двигатели.
В зависимости от конечной цели оценки эффективности и предпочтений ЛПР превалирующим показателем эффективности может быть не только относительное время увода, но также и относительная масса или относительная стоимость системы. Это повлияет на выбор коэффициентов приоритета и, соответственно, на выбор финального варианта построения.
Заключение
Рассмотрены несколько существующих и разрабатываемых способов увода МКА с орбиты, выбраны наиболее перспективные для поставленной задачи сведения спутников массой от 1 до 1000 кг с низких околоземных орбит в диапазоне 300–800 км, не оснащенных ДУ.
Предложена классификация МКА не только по массовым характеристикам, но и по типу системы и ориентации, а также запасам электроэнергии на борту. Разработан алгоритм оценки эффективности различных вариантов построения системы увода МКА с учетом его функциональных особенностей, в основе которого лежит метод относительной интегральной оценки. Для пяти типовых примеров каждого класса аппаратов проведен анализ эффективности средств увода и выбран вариант с наибольшим коэффициентом интегральной оценки. Использование алгоритма оценки эффективности различных вариантов системы на базе метода интегральной оценки позволяет упростить процесс выбора рационального решения по уводу для МКА любого типа и назначения на ранних стадиях проектирования. В свою очередь, применение на МКА, функционирующих на НОО, системы увода на базе предлагаемых средств позволит обеспечить надежный спуск с орбиты.
Список литературы Анализ эффективности применения средств увода с орбиты малых космических аппаратов
- IADC Space Debris Mitigation Guidelines [Электронный ресурс]. URL: https://www.unoosa.org/documents/pdf/spacelaw/sd/IADC-2002-01-IADC-Space_Debris-Guidelines-Revision1.pdf (дата обращения 11.02.2019).
- Руководящие принципы предупреждения образования космического мусора, разработанные Межагентским координационным комитетом по космическому мусору [Электронный ресурс]. URL: https://www.un.org/ru/documents/decl_conv/conventions/space_debris.shtml (дата обращения 11.02.2019).
- Пикалов Р. С., Юдинцев В. В. Обзор и выбор средств увода крупногабаритного космического мусора [Электронный ресурс] // Труды МАИ. 2018. № 100. URL: http://trudymai.ru/published.php?ID=93299 (дата обращения 20.04.2020).
- Aslanov V. S., Ledkov A. S. Dynamics of tethered satellite systems. Cambridge: Woodhead Publishing, 2012. 331 p.
- Баранов А. А., Гришко Д. А., Медведевских В. В., Лапшин В. В. Решение задачи облета объектов крупногабаритного космического мусора на солнечно-синхронных орбитах // Космические исследования. 2016. Т. 54. № 3. C. 242–251.
- Улыбышев С. Ю. Математическое моделирование и сравнительный анализ схем применения аппаратабуксировщика для решения задачи увода объектов космического мусора на орбиту захоронения. Часть 1 [Электронный ресурс] // Труды МАИ. 2019. № 106. URL: http://trudymai.ru/published.php?ID=105746 (дата обращения 20.04.2020).
- Forward R. L., Hoyt R. P. Terminator TetherTM: A Spacecraft Deorbit Device // Journal of spacecraft and rockets, 2000, vol. 37, no. 2, pp. 187–196.
- Janovsky R., Kassebom M., Lubberstedt H., Romberg O., Burkhardt H., Sippel M., Krulle G., Fritsche B. End-of-life de-orbiting strategies for satellites // Deutscher Luft- und Raumfahrt congress, 2002.
- Agasid E., Burton R., Carlino R., Defouw G., Perez A. D., Karacalioglu A. G., Klamm B., Rademacher A., Schalkwyck J., Shimmin R., Tilles J., Weston S. Small Spacecraft Technology State of the Art // NASA Ames Research Center, Mission Design Division, 2015, pp. 41–59.
- Палий А. С. Об эффективности устройства аэродинамического торможения для увода космических аппаратов // Техническая механика. 2012. № 4. С. 82–90.
- Трофимов С. П. Увод малых космических аппаратов с низких околоземных орбит : дисс. … канд. физ.-мат. наук: 01.02.01. М., 2015. 125 с.
- Рыжков В. В., Сулинов А. В. Двигательные установки и ракетные двигатели малой тяги на различных физических принципах для систем управления малых и сверхмалых космических аппаратов // Вестник Самарского университета. Аэрокосмическая техника, технологии и машиностроение. 2018. Т. 17. № 4. С. 115–128.
- Tkachenko I. S., Krestina A. V., Korovin M. D. Analysis of the possibility of using the system for small satellite deorbiting based on an aerodynamic stabilizer, taking into account the physical features of the Earth’s upper atmosphere // Journal of Physics: Conference Series, 2019, vol. 1236, issue 1. doi: 10.1088/1742-6596/1236/1/012087
- Крестина А. В., Ткаченко И. С. Методика выбора проектных параметров системы увода малых космических аппаратов с орбиты // XLIV Академические чтения по космонавтике, посвященные памяти академика С. П. Королева и других выдающихся отечественных ученых – пионеров освоения космического пространства (г. Москва, 28–31 января 2020 г.) : сборник тезисов : в 2 т., Т. 1. М. : Изд-во МГТУ им. Н. Э. Баумана, 2020. С. 107–111.
- Барвинок В. А., Богданович В. И., Дементьев С. Г. [и др.] Современные технологии в авиа- и ракетостроении. М. : Машиностроение, 2014. 320 с.
- Салмин В. В., Кучеров А. С., Старинова О. Л., Прохоров А. Г. Методы системного анализа и исследования операций в задачах проектирования летательных аппаратов: учебное пособие. Самара : Самар. гос. аэрокосм. ун-т, 2007. 272 с.
- Ткаченко И. С., Кауров И. В. Интегральная оценка эффективности космической системы орбитальной инспекции на базе малых космических аппаратов // Вестник Самарского государственного аэрокосмического университета. 2013. №1 (39). С. 91–100.
- Блинов В. Н., Иванов Н. Н., Сеченов Ю. Н., Шалай В. В. Малые космические аппараты. В 3 кн. Кн. 3. Миниспутники. Унифицированные космические платформы для малых космических аппаратов. Омск : Издво ОмГТУ, 2010. 348 с.
- Ткаченко И. С., Салмин В. В. Анализ эффективности космических аппаратов-инспекторов с электрореактивными энергодвигательными модулями // Известия Самарского научного центра РАН. 2011. Т. 13. № 6. С. 106–115.
- ОКБ «Факел». Стационарные плазменные двигатели [Электронный ресурс]. URL: https://fakel-russia.com/images/gallery/produczia/fakel_spd_print.pdf (дата обращения 11.02.2019).
- Исследование, разработка и производство ракетных двигателей, двигательных установок и их агрегатов для орбитальных и межпланетных космических аппаратов, в т. ч. ракетных двигателей малой тяги по пилотируемым полетам: каталог АО «НИИМаш» [Электронный ресурс]. URL: http://www.niimashspace.ru/files/2020/Katalog-2019-rus.pdf (дата обращения 25.04.2020).
- Жидкостные ракетные двигатели малой тяги КБ «Южное» [Электронный ресурс]. URL: https://www.yuzhnoye.com/technique/rocket-engines/low-thrust/t30/ (дата обращения 15.02.2019).
- Industrial Solid Propulsion: Product Portfolio [Электронный ресурс]. URL: http://www.specificimpulse.com/ (дата обращения 25.04.2017).
- Klinkrad H. Space Debris. Models and Risk Analysis. UK, Chichester, Springer, 2006. 430 p.
- Палий А. С. Методы и средства увода космических аппаратов с рабочих орбит (состояние проблемы) // Техническая механика. 2012. № 1. С. 94–102.
- Slavinskis A., Ehrpais H., Kuuste H., Sunter I., Viru J., Kutt J., Kulu, E., Noorma M. Flight Results of ESTCube-1 Attitude Determination System // Journal of Aerospace Engineering, vol. 29, issue 1. doi: 10.1061/(ASCE)AS.1943-5525.0000504
