Анализ электропривода автономного объекта

Автор: Мишин Николай Владимирович, Доманов Виктор Иванович, Халиуллов Динар Салаватович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Современные наукоемкие инновационные технологии
Статья в выпуске: 4-3 т.16, 2014 года.
Бесплатный доступ
В работе исследуется вентильный двигатель при управлении по углу установки датчика положения ротора. Составлена структурная схема двигателя. Проведен анализ чувствительности и определены условия достижения экстремальных значений координат электропривода. Обосновываются преимущества такого управления двигателем.
Вентильный двигатель, датчик положения ротора, экстремум, чувствительность
Короткий адрес: https://sciup.org/148203259
IDR: 148203259 | УДК: 62-83:681.513
Analysis of autonomous object electric drive
In work the valve engine with control on the rotor position sensor installation angle is investigated. The block diagram of the engine is made. The analysis of sensitivity is carried out and conditions of achievement the extreme values of electric drive coordinates are defined. Advantages of such engine control are located.
Текст научной статьи Анализ электропривода автономного объекта
В настоящее время электромеханические системы, которые в зависимости от областей применения называются электроприводами, электромеханизмами, электромеханическими устройствами и т.п., все более широко внедряются в новые объекты или области применения, в частности, используются в автономных транспортных средствах, таких как электропогрузчики, электротележки, гольфкары и электромобили. Предлагается использовать в подобных устройствах электропривод на основе вентильного двигателя (ВД). Это позволит повысить надежность устройства, осуществить рекуперацию энергии, в ряде случаев – упростить кинематическую цепь. Рассмотрим возможные варианты управления вентильным двигателем.
В установившемся режиме уравнение механических характеристик для вентильного двигателя описывается формулой [1]:
U cos O = I q Tp + 1) + to (1 - T3 I d ) - U sin 0 = I d (ТЭ p + 1) + to T3 I q TM to p = I q - M h
где в относительных единицах представлены следующие координаты: I q и I d – проекции тока на оси d и q во вращающейся системе координат, T M – электромеханическая постоянная времени. На основании системы уравнений (2) можно построить структурную схему двигателя (рис. 1).
„ cos O
M =-- U4U
—
1 + TU sin 0 ------э . . to
1 + Ttoг
,
где М, ω, U, T Э – относительные значения момента, скорости, напряжения и электромагнитной постоянной ВД.
Исходя из (1) управление двигателем может быть реализовано за счет изменения напряжения U либо угла установки θ датчика положения ротора (ДПР). В [1] отмечается, что двигатель может быть описан системой дифференциальных уравнений, которые при переходе к записи в операторной форме принимают вид:
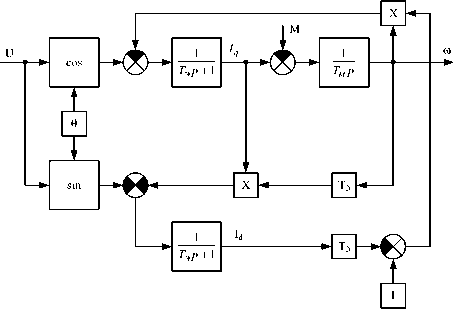
Рис. 1. Структурная схема вентильного двигателя с учетом значения угла установки θ
Из выражения (1) видно, что практически все координаты ВД зависят от угла установки θ . Анализ уравнения (1) показал, что в функции M = f ( θ ) имеется экстремум при условии:
0ЭКС = arctg (-тэ^)
Халиуллов Динар Салаватович, студент
- M
ЭКС max
ujx + Tto _ to
1 + т Э2 to 2 1 + т Э2 to
Аналогичный анализ можно провести для функции U = f ( θ ). Экстремум U = f ( θ ) достигается при том же условии (3):
U ЭКС
= U min
to 1 + T 2 to 2
-- +— Э —
V 1 + t 2 ® 2 V 1 + t 2 ®г
На основании (1) получаем следующее выражение:
Анализ функции ω = f ( θ ) показывает, что экстремум достигается при условии:
U _ (1 - T Э to0 )U
~ U - to (1 + Тэи 0 )
T3M = sin 0 cos 0 + T3U cos 0
По аналогичной формуле определяется чувствительность к изменению угла установки:
Уравнение (6) не позволяет однозначно, как в предыдущих случаях, определить значение θ ЭКС . Можно найти θ ЭКС для условия М=0:
- (U0 + to + T3Uto)0 U - to(1 + Тэи)0
0 ЭКС = arcsin TU )
В этом случае:
_ _ U 1 - T 22 U2
to ЭКС = to max = ^ Т^Ц1
.
Сравнение выражений (13) и (14) показывает, что при прочих равных условиях механическая характеристика вентильного двигателя более чувствительна к изменению угла установки ДПР, чем к изменению напряжения. Пусть экстремальный регулятор обеспечивает выполнение условия (3). В этом случае
Для того, чтобы оценить влияние угла установки на момент, найдем приращение ΔМ по формуле:
sin 0 экс = sin( arctg ( — T э to )) =
KM = M3Kc - MH
cos 0 экc = cos( arctg ( - T э to )) =
- Tэ to
>1 1 + т Э 2to 2
V1 + T э2to2
где М ЭКС – экстремальное значение по формуле (4); М Н – значение М по формуле (1) при условии θ =0 (нейтральная установка датчика).
KM =
U Q1 + T э2to 2 - 1) 1 + т Э2 ® to
Видно, что на основе сигнала по скорости можно вычислить оптимальный угол смещения ДПР. Структурная схема вычислителя приведена на рис. 2.
Из уравнения (10) видно, что ΔМ возрастает с ростом U влияние Т Э и ω на ΔМ незначительно. Для оценки влияния угла установки на напряжение выполним аналогичный анализ:
K U = U3K - U UH ЭКС H
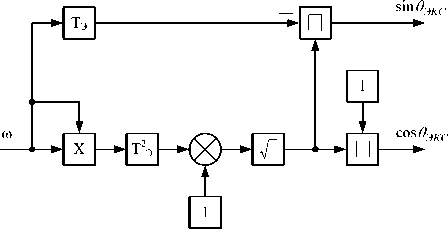
Рис. 2. Структурная схема вычислителя θ ЭКС
где U ЭКС – экстремальное значение U по формуле (5); U H – значение U из формулы (1) при условии θ =0.
к u = to + m (1 + T to 2)
V1 + T 3 2 to 2
—
В реальном электроприводе экстремальный регулятор должен изменять сигналы ДПР по закону
Из уравнения (12) видно, что модуль ΔU возрастает с ростом ω , М и T Э . Определим чувствительность момента к изменениям напряжения и угла установки. Чувствительность к изменению напряжения определяется выражением:
U dM U
= dU M
.
sin а = sin( a + 0 ЭКС ) cos a ' = cos( a + 0 ЭКС )
Для выполнения этих условий используем узел координатного преобразования. В вентильном двигателе имеются сигналы sin α и cos α , вырабатываемые ДПР. Сигналы sin θ ЭКС и cos θ ЭКС формируются вычислителем (рис. 2). На основании этого координатное преобразование
может быть реализовано схемой, структура которой приведена на рис. 3.
По структуре (рис. 1) было проведено моделирование вентильного двигателя. На рис. 4 приведены логарифмические амплитудные характеристики при управлении напряжением (1) и при управлении по углу установки (2).
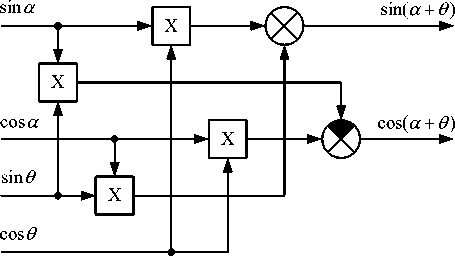
Рис. 3. Структурная схема узла координатного преобразования
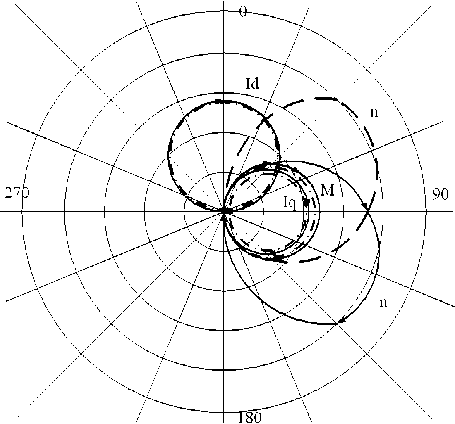
Рис. 4. Угловая диаграмма ВД
В процессе исследований анализировались координаты ВД при пуске с различными значениями угла Q . На основании этого построена угловая характеристика вентильного двигателя, изображенная на рис. 4. Изменение угла Q происходит по часовой стрелке. По направлениям значений угла Q в масштабе отложены соответствующие значения координат ВД, которые затем соединены в годограф. Положительные значения координаты обозначены непрерывистой линией, отрицательные – пунктирной.
Анализ угловой диаграммы (рис. 4) показывает, что
-
- годографы координат Id, Iq, M представляют собой окружности;
-
- годоргафы Id и Iq сдвинуты друг относительно друга на 90 градусов;
-
- годограф n состоит из двух эллипсов, экстремумы для +n и –n не совпадают, но симметричны относительно Q =90 ° ;
-
- годографы Iq и M лежат на одной оси и масштабно совпадают;
-
- максимальная скорость при пуске соответствует Q =90 ° ±а, где а - угол, зависящий от конструктивных параметров ВД.
Список литературы Анализ электропривода автономного объекта
- Герман-Галкин, С.Б. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0. -СПб.: КОРОНА принт, 2001. 320 с.
- Розенфельд, В.Е. Теория электрической тяги/В.Е. Розенфельд, И.П. Исаев, Н.Н. Сидоров, М.И. Озеров. -М.: Транспорт, 1995. 294 с.
- Доманов, В.И. Автоматизированный электропривод автономного транспортного средства/В.И. Доманов, А.В. Доманов, Н.В. Мишин, А.В. Мишин//Приборы и системы. Управление, контроль, диагностика. 2012. №6. С. 33-36.
- Доманов, В.И. Анализ работы вентильного двигателя автономных объектов/В.И. Доманов, А.В. Доманов, Н.В. Мишин, А.В. Сергеев//Электроника и электрооборудование транспорта. 2013. №1. С. 36-40.
