Анализ качества выбора и настройки автоматического регулятора уровня жидкости

Автор: Панферов Сергей Владимирович, Телегин Александр Иванович
Рубрика: Инженерное оборудование зданий и сооружений
Статья в выпуске: 16 (149), 2009 года.
Бесплатный доступ
Рассматривается задача структурно-параметрического синтеза системы автоматического регулирования уровня жидкости. Приводится структура и параметры настройки квазиоптимального регулятора. Анализируются устойчивость системы и качество переходных процессов в ней.
Автоматический регулятор, уровень жидкости, структура, параметры настройки, устойчивость, качество переходных процессов
Короткий адрес: https://sciup.org/147154216
IDR: 147154216 | УДК: 681.52.01
Analysis of choice quality and adjustment of the automatic fluid level controller
The problem of structurally-parametrical synthesis of system of automatic control of level of a liquid is considered. The structure and adjustment parameters a regulator is resulted. Stability of system and quality of transients in it are analyzed.
Текст научной статьи Анализ качества выбора и настройки автоматического регулятора уровня жидкости
В настоящее время в системах теплоснабжения для автоматического регулирования различных переменных технологических процессов широко используются ПИД-регуляторы и их частные варианты. Накоплен огромнейший опыт применения таких регуляторов, в частности, разработаны и апробированы различные способы их настройки. Вместе с тем, как неоднократно отмечает В .Я. Рогач в своем сравнительно недавно изданном учебнике [1], П-, ПИ- и ПИД- «...алгоритмы были получены чисто эвристическим путем» [1, с. 82 и др.] и что «...достаточно убедительное формальное доказательство целесообразности их применения... до сих пор получить не удалось» [1, с. 24].
В работах [2, 3], как нам представляется, удалось получить некоторое формальное обоснование целесообразности применения ПИД-регуляторов, здесь задача решалась методом «подгонки» передаточной функции замкнутой системы к некоторому достаточно разумному и практически достижимому виду. Найдены эталонные структуры и настройки регуляторов для типовых динамических характеристик промышленных объектов управления, при этом установлено, что все эти регуляторы принадлежат ПИД-семейству. Казалось бы, что поставленная цель достигнута, однако для полноты исследования проблемы необходимо рассмотреть вопрос о качестве переходных процессов в таких системах и о грубости этих структур и настроек, данная задача и решается в настоящей работе.
Рассмотрим объект управления с передаточной функцией вида
^об(р)=^— ехр(-тобр), (1)
ТобР где 7"об,тоб- соответственно постоянная времени и время запаздывания объекта, р- комплексная переменная. Такими передаточными функциями описываются различные объекты регулирования уровня жидкостей в системах теплоснабжения: конденсаторы, деаэраторы, расширительные баки, выполняющие роль гидростатических стабилизаторов давления в заданных точках тепловой сети, и др.
Как известно [2, 3], близким к идеальному для такого объекта является П-регулятор с коэффици-
Т ентом передачи kD = ———, где 0 - достаточно р %б+6
малая постоянная времени. Для анализа переходных процессов в системе с объектом управления данного типа разработаны две компьютерные программы: одна для анализа переходных процессов при возмущении по заданию, а другая - при возмущении со стороны регулирующего органа. В каждой из разработанных программ предусмотрен ввод 7об, тоб и коэффициента передачи П-регулятора, каждая из программ осуществляет не только построение графика переходного процесса, но и определяет перерегулирование а и время регулирования /р , а также вычисляет значения следующих критериев:
ZK
А=ре(О|^, (2)
о
?к
72=fE2(0^, (3)
О где £(t)=x3(t)~x(t) - ошибка регулирования (рассогласование), х3(/) и x(t) - соответственно заданное и действительное значение регулируемой величины, t - время, /к - конечное время оценки переходного процесса. Здесь время регулирования /р определялось как время, по истечении которого отклонение регулируемой величины от задания не будет превышать 5 %.
В процессе численных вычислений установ-- Т лено, что во всех случаях, когда к = —— (пара метр 0 полагается равным нулю), дифференциальное уравнение замкнутой системы автоматического регулирования (САР) будет иметь вид:
хоб^7^+х(1-т:Об)=х3(1-тОб). (4)
at
Решая уравнение (4) для единичного ступенчатого воздействия, нашли, что во всех этих случаях о=49 %. Если численное значение ^отли-
Т чается от величины -^ (0^0), то изменяется и тоб величина перерегулирования. Полученные значения показателей качества переходного процесса, например, для случая, когда Гоб = 15 с, тоб = 5 с , а кр принимает различные значения в окрестности Тоб % хода ИМ точки kD = —^ =3----------приведены в табл. 1.
тоб ед. per. вел.
Провели исследование качества переходных процессов и для других значений параметров объекта регулирования, в частности, для Тоб = 30 с, Тоб =10сидля Т^ =15с> тоб =3с.
Анализируя полученные данные, можно отметить следующее: при эталонном (базовом) значении
Т коэффициента передачи П-регулятора к = ——
Тоб перерегулирование и в рассматриваемых САР при различных значениях Гоб,тоб получается практически одинаковым и равным ® 47 ч-49 %. Время регулирования при прочих равных условиях растет прямо пропорционально росту (Тоб + тоб) и
Т обратно пропорционально величине кр = —^- . Ба-
Т зовая настройка П-регулятора кр = —— является тоб достаточно грубой (робастной), поскольку суще-Т ствует заметная окрестность точки к = —^, в %б которой сохраняются приемлемое качество и запас устойчивости системы (заметим, что о запасе устойчивости можно судить непосредственно по семейству кривых переходного процесса, полученных при различных настройках регулятора). Настройки П-регулятора, оптимальные по критериям (2) и (3) не совпадают как между собой, так и каждая с базовой настройкой. Так, например, в случае табл. 1 базовое значение коэффициента
Тоб % хода ИМ передачи равно к = =3-----------, вместе с тем
Р Тоб еД- Рег-вел- оптимальное по минимуму критерия 1Х значение равно
, . % хода ИМ кр= 1,75----------, а оптимальное по минимуму р ед. per. вел.
_ 7 о С % Х°Да ИМ критерия 12 значение равно kD = 2,5-----------.
ед. per. вел.
Причем настройки, найденные из условия минимума критерия /2 заметно ближе к базовой настройке, в некоторых случаях их различие можно считать достаточно малым. Очевидно, что все это объясняется как существом рассматриваемого метода синтеза САР, так и определенной погрешностью выкладок при его реализации.
Показатели качества переходных процессов в САР при возмущении по нагрузке (со стороны регулирующего органа), например, для случая табл. 1 приведены в табл. 2.
В целом, анализ полученных результатов показал, что величина перерегулирования и при
Таблица 1
Показатели качества переходных процессов для Тоб = 15 с, тоб = 5 с при возмущении по заданию
|
, % хода ИМ кр,------------ ед. per. вел. |
0,5 |
1,0 |
1,5 |
1,75 |
2,0 |
2,5 |
3,0 |
3,5 |
4,0 |
|
а, % |
0 |
0 |
3,43 |
9,30 |
16,3 |
31,79 |
49 |
64,4 |
80,7 |
|
/р, с |
79 |
32,4 |
17 |
25,4 |
24,8 |
33,2 |
42,2 |
69,8 |
99,8 |
|
/1?(ед. per. вел.)-с |
29,47 |
14,99 |
10,71 |
10,32 |
10,40 |
11,47 |
13,79 |
18,16 |
26,99 |
|
/2,(ед.per.вел.)2 с |
88,34 |
52,30 |
41,67 |
39,27 |
37,97 |
37,88 |
41,09 |
49,38 |
70,36 |
Таблица 2
Показатели качества переходных процессов для Тоб = 15 с, тоб = 5 с при возмущении по нагрузке
Время регулирования tP при прочих равных условиях при возмущении со стороны регулирующего органа меньше, чем в случае возмущения по заданию, что, в общем-то, достаточно объяснимо.
Если робастность рассматривать как грубость системы по отношению к изменениям параметров объекта управления, то можно привести следующие результаты. В принципе все вышеизложенное можно интерпретировать и как анализ для данного случая, здесь нужно только считать, что, якобы, регулятор настроен по параметрам объекта управления, имевшим место в недалеком прошлом, а в данный момент времени объект управления имеет те значения параметров, которые указаны в заголовках таблиц.
Если постоянная времени и время запаздывания объекта изменятся соответственно на АТоб и на Атоб, а регулятор будет иметь настройку, найденную по предыдущим значениям его параметров Т kD = —^—, то передаточная функция разомкну-Р ^+9
той системы будет иметь вид w (р\ ^ехР(~тобР) ехр(-Дтобр) (в+х^р 41+^/т^у
Используя критерий устойчивости Найквиста для систем с запаздыванием [7], нашли, что в этом случае критическая частота сокр будет равна
(О™ =---------------------- ,
• кр (e+T^xi+Ar^/r^)
поэтому условие устойчивости замкнутой системы автоматического регулирования (САР) в общем случае запишется так:
(т^+Ат^/К©*^ (5)
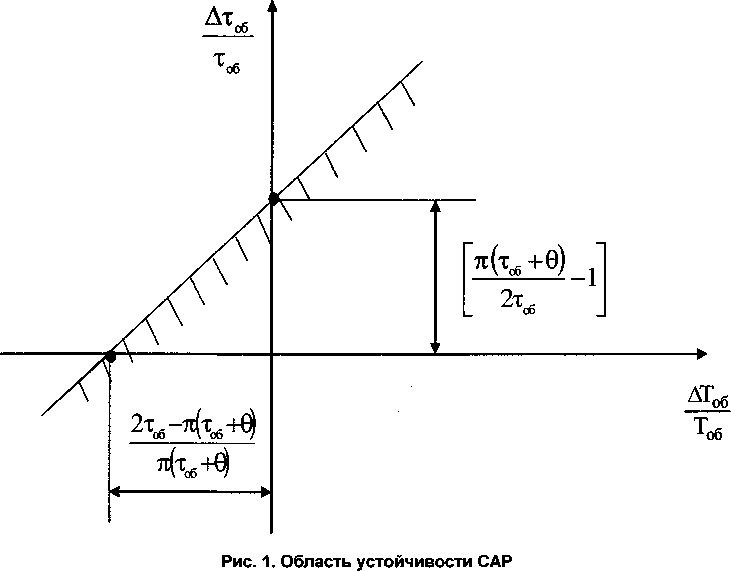
На координатной плоскости «АТ^/Т^ -Атоб/тоб» граница области устойчивости будет представляться следующей прямой (см. рисунок):
А^об _ ^(ТОб + ®) , Q Л^Об ) _ 1 (^
об тоб ^об
На рисунке область устойчивости - это область, расположенная правее своей границы (штриховка направлена внутрь области). Причем, нетрудно заметить, что с увеличением параметра О область устойчивости замкнутой САР расширя-
, 71 ' (Тоб +6) 1 X ется, т. к. (----—--1) - точка пересечения
2^об прямой (3) с осью ординат « Атоб /тоб» с увеличе-
-. z ^ ^об ^об лО _ нием 0 «ползет» вверх, а ( ——----—----) - точ-
V л-(тоб+0) 7
ка пересечения прямой (6) с осью абсцисс «АТоб/Тоб» перемещается влево. При 0=0 область устойчивости будет иметь наименьший размер, однако при этом начало координат будет располагаться все-таки правее ее границы. Следовательно, при 0=0 САР имеет некоторый запас устойчивости относительно вариаций параметров Атоб и А7об, с увеличением 0 робастность устойчивости [8] повышается.
Передаточная функция замкнутой системы по задающему воздействию будет равна
( х =_________ ехрНтоб+ДТобМ _________
Ф+Ъ XI+^ /7^+ехрНТоб +Дтоб)^] ‘ Отсюда следует, что дифференциальное уравнение САР будет иметь вид:
(в+т^ XI+АТ^ /т^^+хО-т^ -Дто6)= at
= U(t-xo6-Axo6), (7)
где х - выходная (регулируемая) величина объекта, U - заданное значение регулируемой величины. Из (5) и из решения дифференциального уравнения (7) следует, что при АГоб > 0 влияние этого параметра на устойчивость (робастность устойчивости) и качество (робастность качества) САР аналогично влиянию параметра 6 [2, 3], т. е. колебательность переходной функции уменьшается с ростом АТоб, переходный процесс все в большей степени приобретает апериодический характер.
Для примера в табл. 3 приведены показатели качества переходных процессов в САР для случая, когда
^>б =15с, т^ =5с,
7^ _3 % хода ИМ ед. per. вел. ’
Атоб=0,
а АТ^ принимает различные как положительные, так и отрицательные значения.
Аналогичные результаты получаются и при Атоб<0, т. е. с увеличением | Атоб | демпфирован-ность системы растет. Если же Атоб >0, то с увеличением Атоб перерегулирование возрастает, ухудшаются как качество переходного процесса, так и запас устойчивости системы. В табл. 4 приведены показатели качества переходных процессов в САР для случая, когда Тоб = 15 с, тоб = 5 с , 1 о % х°Да им . _ _ .
£ -_оо_=3----------? д7об =о? а Атоб прини- тоб ед. per. вел.
мает различные как положительные, так и отрицательные значения.
Выполненные расчеты показали, что если параметры объекта управления определены точно, то при 9=0 с перерегулирование в данной САР будет равно а=49 % . Если же время запаздывания
Таблица 3
Показатели качества переходных процессов для Гоб = 15 с, тоб = 5 с при возмущении по заданию при различных значениях ДТоб
|
А^об’ с |
+1 |
+3 |
+5 |
-1 |
-3 |
-5 |
|
о, % |
41,89 |
31,79 |
23,89 |
55,02 |
72,49 |
97,04 |
|
Zp , с |
42 |
33,2 |
32,2 |
51,6 |
88,6 |
157 |
Таблица 4
Показатели качества переходных процессов для Тоб = 15 с, тоб = 5 с при возмущении по заданию при различных значениях Атоб
щего место на реальном объекте (тоб+Атоб), то перерегулирование возрастает. Так, например, если тоб =4 с, а Атоб =1 с, то о=72 %. САР в такой ситуации, когда из-за погрешности параметрической идентификации получилось, что тоб < (тоб +Атоб), может и потерять устойчивость. В самом деле, если структура математической модели объекта и все ее параметры, кроме времени запаздывания, определены достаточно точно, то передаточная функция разомкнутой системы получается равной
-
= ^^........^t—9^ 5 поэтому САР будет
-
Р (6+тоб)^
устойчива лишь при удовлетворении следующего неравенства: (тоб + Атоб ) / (0+тоб ) < тг / 2 . В случае табл. 4, при Атоб=3с получили расходящийся переходный процесс, т. е. система потеряла устойчивость, что и следовало ожидать, т. к.
(тоб +Атоб)/(0+тоб ) = (5 + 3)/5> л/2 .
При отработке единичного ступенчатого задания (/(0= КО при ^->°° ^->1, т. е. САР астатическая по задающему воздействию. Передаточная функция системы по каналу «возмущение со стороны регулирующего органа - ошибка регулирования»
-
30 (е+ТобХ^об+А^об^+^обехрНт^^
поэтому Um^jP0^) =-^-^ при р^О, следова-^об тельно, по данному каналу САР статическая, причем ошибка регулирования тем меньше, чем больше
Т коэффициент передачи П-регулятора kD = —— .
р т+0
Выводы. Проведенный анализ показал, что рассматриваемый метод синтеза, позволяющий од нозначно выбрать как структуру, так и параметры настройки регулятора уровня жидкостей, обеспечивает приемлемое качество переходных процессов и достаточный запас устойчивости системы при довольно заметных по размерам вариациях параметров объекта управления и погрешностях задания настроек регулятора. Поэтому данный метод синтеза можно достаточно уверенно рекомендовать для практического использования.
Список литературы Анализ качества выбора и настройки автоматического регулятора уровня жидкости
- Ротач, В.Я. Теория автоматического управления: учеб. для вузов/В.Я. Ротач. -М.: Изд-во МЭИ, 2004. -400 с.
- Панферов, В.И. Об одном подходе к решению задачи выбора и настройки автоматических регуляторов/В.И. Панферов//Известия Челябинского научного центра. -2004. -Вып. 4 (26). -С. 139-144.
- Панферов, В.И. Выбор и настройки автоматических регуляторов в системах теплоснабжения/В.И. Панферов//Вестник ЮУрГУ. Серия «Строительство и архитектура». -2005. -Вып. 3 -№ 13 (53). -С. 81-84.
- Копелович, А.П. Инженерные методы расчета при выборе автоматических регуляторов/А.П. Копелович. -М.: Металлургиздат, I960. -190 с.
- Проектирование систем контроля и автоматического регулирования металлургических процессов/Г.М. Глинков, В.А. Маковский, С.Л. Лотман, М.Р. Шапировский; под ред. Г.М. Глинкова. -М.: Металлургия, 1986. -352 с.
- Фрер, Ф. Введение в электронную технику регулирования: пер. с нем./Ф. Фрер, Ф. Орттенбургер. -М.: Энергия, 1973. -190 с.
- Воронов, A.A. Основы теории автоматического управления: Автоматическое регулирование непрерывных линейных систем/A.A. Воронов. -М.: Энергия, 1980. -312 с.
- Дорф, Р. Современные системы управления: пер. с англ./Р. Дорф, Р. Бишоп. -М.: Лаборатория Базовых Знаний, 2002. -832 с.
